Известны устройства для управления затлублением рабочего органа землеройной машины, преимущественно одноковщового экскаватора, используемого при отрывке котлованов, траншей, каналов, возведении насыпей и других земляных сооружений, разрабатываемых до заданной отметки. В таких устройствах используются соответствуюшие датчики, связанные с пультом управления. Однако эффективность таких устройств недостаточна.
В описываемом устройстве для повышения эффективное ги землеройных машин, в особенности на зачистных работах, установлен программный задатчик, взаимодействуюший посредством электрической системы € датчиком длины троса, укрепленным на барабане лебедки экскаватора, и датчиком угла наклона экскаватора и его стрелы, установленным на последней. В устройстве применено также оптическое приспособление для нивелировки базы экскаватора в зависимости от рельефа местности в точке его стояния и контроля величины заглубления рабочего органа машины, устанавливаемого программным задатчиком.
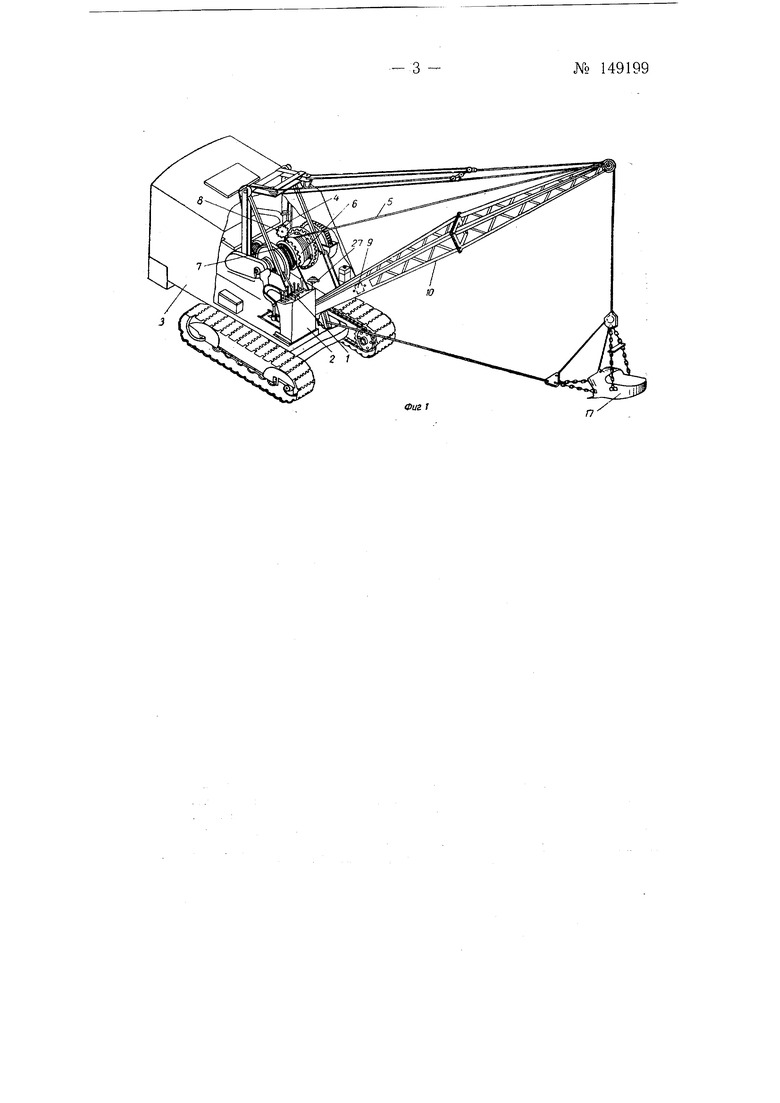
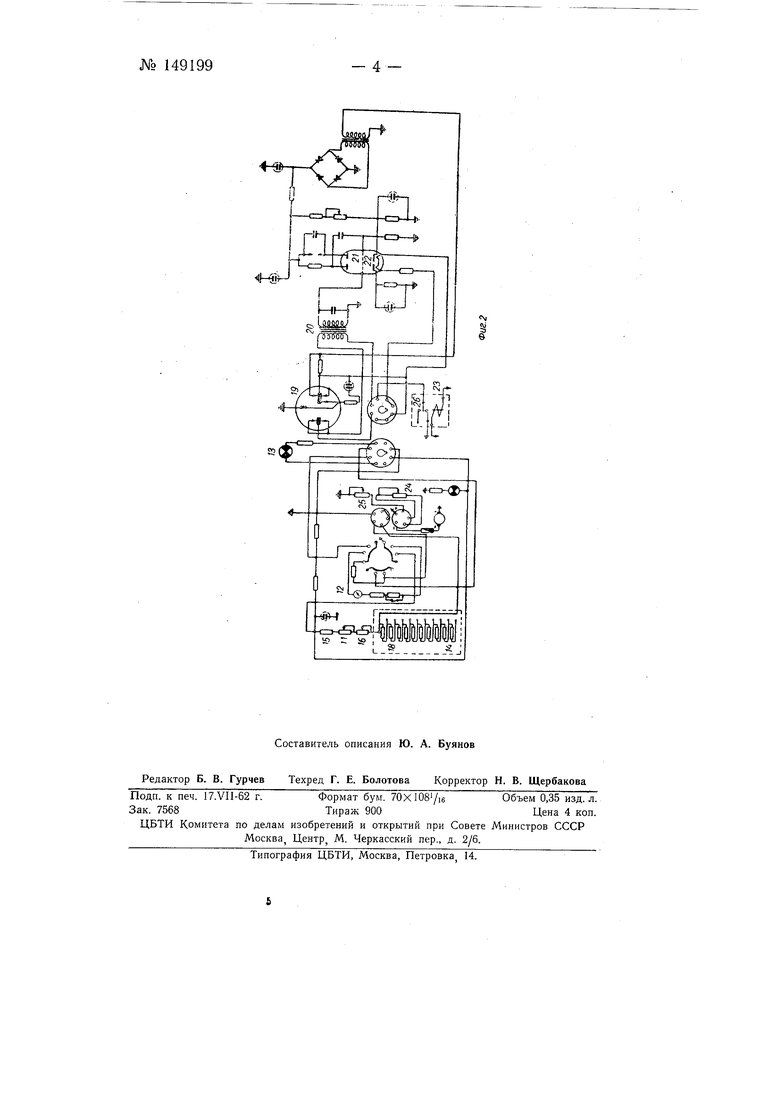
На фиг- 1 изображен экскаватор, оборудованный описываемым устройством; на фиг. 2 - электрическая схема устройства.
Устройство для управления заглублением рабочего органа землеройной машины состоит из программного задатчика /, установленного па пульте 2 управления экскаватора 3, потенциометрического датчика 4 длины троса 5, приводимого от барабана 6 главной лебедки 7 посредством зубчатой передачи 8, и потенциометрического датчика 9 наклона, смонтированного на стреле 10.
№ 149199- 2 Перед началом работы экскаватор 3 устанавливается на нулевой отметке, после чего изменением неременного сопротивления // показания микроамперметра 12 выводятся «на нуль, что соответствует балансу мостовой схемы, и загорается сигнальная лампа 13. Затем посредством переключателя 14 и переменных сопротивлений 15 и 16 производится программирование заглубления рабочего органа - ковша 17 на определенную глубину (в метрах и сантиметрах). Количество введенных калиброванных сопротивлений 18 соответствует балансу схемы на этой глубине. Возникший в исходном положении потенциал разбаланса модулируется вибратором 19, переменная составляюшая поступает на повышающий трансформатор 20, а с него на сетку 21 лампы 22. Срабатывает реле 23, разрываюш.ее цепь индикаторной лампы /5, которая гаснет.
По мере углубления ковша /7 в грунт изменяется величина переменного сопротивления 24 датчика 4, в результате чего с учетом изменения переменного сопротивления 25 датчика 9 в зависимости от наклона экскаватора 3 и его стрелы 10 на заданной глубине происходит балансирование схемы. Микроамперметр 12 снова возвращается к нулевой отметке, потенциал сетки 21 лампы 22 падает до нуля, реле 23 обесточивается, и его контакт 26 замыкает цепь лампы 13, которая загорается, сигнализируя о достижении заданной глубины копаиия. Помимо этого, может быть приведено в действие какое-либо исполнительное приспособление, препятствующее дальнейшей работе экскаватора 3, например, путем торможения гла/вной лебедки 7 или выключением двигателя.
Оптическое приспособление - зрительная труба 27 с минутным уровнем, установленное на пульте 2 управления, обеспечивает контроль глубины выемки по рейке и проведение нивелировки базы экскаватора 3.
Описываемое устройство позволяет автоматизировать землеройные и грузоподъемные работы, производимые экскаваторами, снабженными сменным рабочим оборудованием-драглайном, прямой и обратной лопатами, краном и копром, в части регламентированного заглубления рабочих органов или подъема груза иа определенную высоту. Устройство может быть также установл ено на бульдозерах и навесном или прицепном сельскохозяйственном оборудовании.
Предмет изобретения
1.Устройство для управления заглубление.м рабочего органа зе.млеройной машины, преимущественно одноковшового экскаватора, используемого при отрывке котлованов, траншей, каналов, возведении насыпей и других земляных сооружений, разрабатываемых до заданной отметки, с использованием соответствующих датчиков, связанных с пультом управления, отличающееся тем, ч го, о целью повышения эффективности землеройных мащин, в особенности на зачистных работах, в нем установлен программный задатчик, взаимодействующий посредством электрической системы с датчиком длины троса, укрепленным на барабане лебедки экскаватора, и датчиком угла наклона экскаватора и его стрелы, установленным на последней.
2.Применение в устройстве по п. 1 оптического приспособления для нивелировки базы экскаватора в зависимости от рельефа местности в точке его стояния и контроля величины заглубления рабочего органа мащины, устанавливаемого программным задатчиком.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР с УСТРОЙСТВОМдля | 1971 |
|
SU312924A1 |
| Ковш землеройной машины | 1990 |
|
SU1789600A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| Гидравлический экскаватор | 1986 |
|
SU1370190A1 |
| Роторный рабочий орган универсальной землеройной машины | 1979 |
|
SU905387A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Погрузчик-экскаватор | 1991 |
|
SU1803499A1 |
| Рабочее оборудование цепного траншейного экскаватора | 1985 |
|
SU1301932A1 |
| Устройство для нивелировки и зачистки дна траншеи, например к многоковшовому экскаватору | 1960 |
|
SU133692A1 |
| Устройство управления одноковшовым экскаватором | 1982 |
|
SU1189943A1 |