ях магнитных усилителен включены на истачник переменного тока (25 В) и соединены по-. следовательно между собой через балластный резистор 7. Рабочая обмотка 5 магнитного усилителя 2 и блок смещения ординат 8 включены г араллельно.
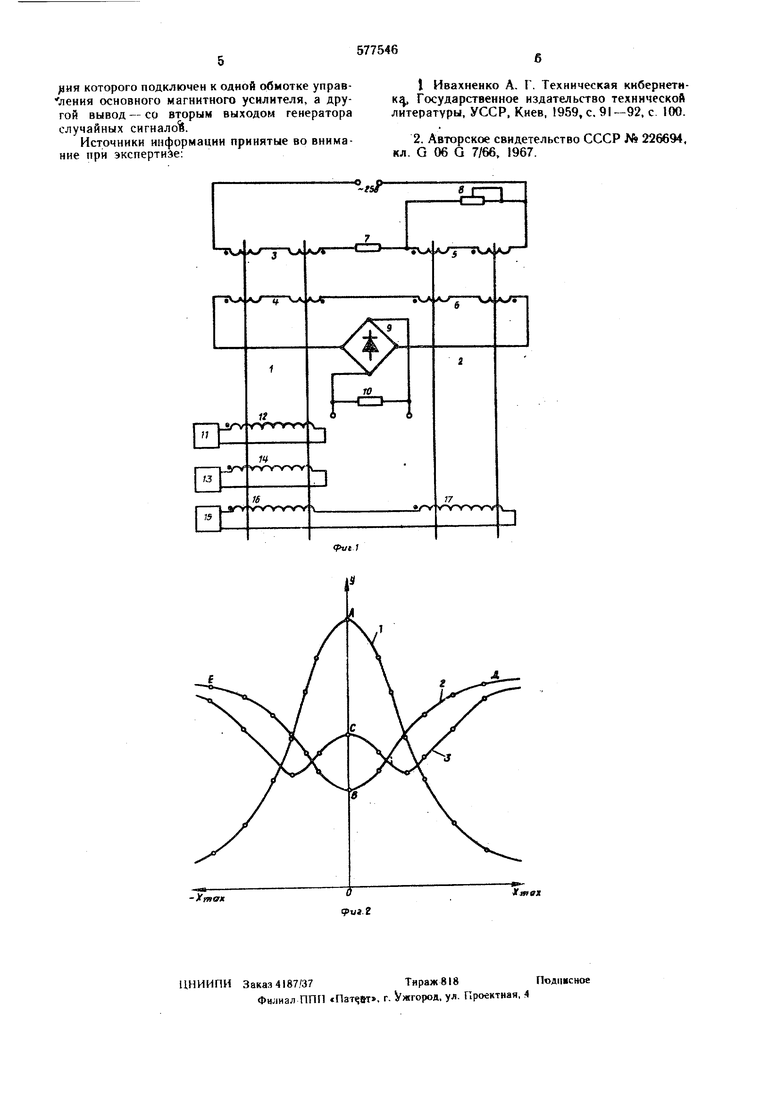
Вторичные рабочие обмотки 4, 6 обоих магнитных усилителей соединены последовательно и встречно через мостовой выпрямитель 9 и нагрузочный резистор JO, который служит выходом устройства. Блок управления 1 включен на обмотку управления 12 магнитного усилителя I. Блок задания начальных условий 13 включен на обмотку управления 4 магнитного усилителя 1. Генератор случайных сигналов 15 включен на последовательно соединенные обмотки управления 16 к 17 обоих магнитных усилителей.. -,
Магнитный усилитель служит одновременно дросселем насыш,ения н трансформатором и имеет экстремальную статическую характеристику ) « экстремумом-максимумом (кривая 1 ем. фиг.-2), где yj - выходная величина магпитиош усилителя 1 {напряжение вторичной рабочей обмотки 4), Х. управляющее воздействие блока управяе1шя 11.
Магнитный усилитель ;2,.служит .трансформатором, в которомнапряжение первичной рабочей обмотки 5 зависит от изменения индуктивности рабочей обмотки 3 магнитного усилителя 1. Экстремальная статическая характе.ристика (5) имеет экстремум-миниму.м (кривая 2 см. фиг. 2), где уг-- выходная величина магнитного усилителя 2 (напряжение вторичной, рабочей обмотки 6), .X - управляю цее воздействие блока управления II.
Устройство работает следующим образом.
При увеличении управляющего воздействия на обмотку управления 12 основного магнитного усилителя увеличивается насыщение его сердечников, уменьщается индуктивность рабоЧкх обмоток 3 н 4. Это приводит к перераспре№лению напряжения питания между последовательно соединенными обмоткой 3, балластным резистором 7 н рабочей обмоткой 5 магнитного усилителя 2, т.е. уменьшение индуктивности обмотки 3 магнитного усилителя приводлт к уменьшению падения напряжения на ней, увеличению напряжения на обмотке 5 магнитного усилителя 2 и наоборот.
Напряжение обмотки 3 трансформируется также в обмотку 4, изменение напряжения которой происходит по кривой 1 (см. фиг. 2). В магнитном усилителе 2 увеличение напряжения первичной рабочей обмотки 5 приводит к увеличению напряжения на вторичной рабочей обмотке 6, напряжение которой H3Met HeTся по кривой 2 (см. фиг. 2). Напряжения двух вторичных обмоток 4 и б, соединенных последовательно и встречно, сум.мируются на выходном нагрузочном резисторе 10, результирующее напряжение которого изменяется по многоэкстремальной характеристике (кривая 3 см. фиг. 2) при изменении.,, управляющего воздействия в пределах - .
X Y г Y ffjwx л л maxj
Блок смещения ординат 8, включенный параллельно рабочей обмотке 5 магнитного усилителя 2, служит для изменения падения напряжения на ней, а следовательно, и для изменения напряжения на обмотке 6. При уменьшении сопротивления блока смещения ординат 8 кривая 2 (см. фиг. 2) смещается по оси ординат вниз ближе к оси абсцисс, а ее ветви ВД и BE спрямляются; в пределе кривая 2 совмещается с осью абсцисс. При этом результирующая кривая 3 также будет смещаться и деформироваться, принимая вид одноэкстремальной кривой типа 1.
При увеличении сопротивления блока смещения ординат 8 щунтирующее действие его уменьшается, а следовательно,повышается напряжение на обмотке 6, т.е. кривая 2 смещается по оси ординат вверх, а результирующая кр.чвая 3 деформируется смещается вниз.
Для задания начальных условий положения многоэкстремалькой характеристики служит блок задания начальных условий 13, выход которого включен на обмотку управления 14 магнитного усилителя . Действие сигнала блока задания начальных условий 13 на устройство аналогично действию управляющего сигнала блока управления 11.
Генератор случайных сигналов 15, включенный на обмотки управления 16, 17 обоих магнитных усилителей, осуществляет дрейф статической характеристики устройства вдоль оси абсцисс.
Устройство для моделирования экстремальных характеристик систем автоматического управления, благодаря введению новых элементов и связей, обладает более широкими функциональными возможностями - обеспечивает возможность получения многоэкстремальной характеристики.
Формула изобретения
Устройство для моделирования экстремальных характеристик систем автоматического управления, содержащее магнитный усилитель, одна из обмоток управления которого соединена с первым выходом генератора случайных сигналов, другие обмотки управления магнитного усилителя подключены соответственно к вы.ходам блока задания начальных условий и блока управления, блок смещения ординат и мостовой выпрямитель, отличающееся тем, что, с целью расширения функциональных возможностей устройства, в него введен дополнительный магнитный усилитель, параллельно первой рабочей обмотке которого включен блок смещения ординат, а последовательно с ней соединена одна рабочая обмотка основного магнитного усилителя, другая рабочая обмотка которого через .мостовой выпрямитель соединена со второй рабочей обмоткой дополнительнрго магнит-, ного усилителя, один вывод обмотки управ ге 1ия которого подключен к одной обмотке управления основного магнитного усилителя, а другой вывод - со вторым выходом генератора случайных сигналов.
Источники информации принятые во внимание при экспертизе;
I Ивахненко А. Г. Техническая кибернетику Государствеиное издательство технической литературы, УССР, Киев, 1959, с. 91-92. с 100.
2. Авторское свидетельство СССР № 226694, кл. G 06 Q 7/66, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования многоэкстремальных характеристик систем автоматического управления | 1978 |
|
SU734744A1 |
| Устройство для моделирования экстремальных характеотстик систем автоматического регулирования | 1975 |
|
SU589613A2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТИРИСТОРАМИ РЕВЕРСИВНОГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ ПИТАНИЯ ОБМОТКИ ВОЗБУЖДЕНИЯ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА (ВАРИАНТЫ) | 2005 |
|
RU2313893C2 |
| Устройство для регулирования тока возбуждения электрической машины постоянного тока | 1979 |
|
SU884061A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СВАРОЧНОГО ТОКА ПРИ РУЧНОЙ ДУГОВОЙ ЭЛЕКТРОСВАРКЕ И СВАРОЧНЫЙ ГЕНЕРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2315420C1 |
| УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ БЕССТУНЕНЧАТОЙ ТРАСМИССИЕЙ САМОХОДНОЙ МАШИНЫ | 1973 |
|
SU389968A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |
| Устройство для автоматического управления копировальным станком | 1948 |
|
SU83585A1 |
| Устройство для контроля работы преобразователя | 1980 |
|
SU944055A1 |
