Известны герметичесние разгрузочные устройства для скипов и опрокидных клетей, в которых вес проходящего через устройство материала используется для автоматического управления впускной н выпускной задвижкамй , герметтичеокой камеры устройства.
Предлагаемое устройство отличается от устройств подобного ,рода тем, что, с целью воздействия при повороте -каме ры вокруг неподвижной оси поя влиянием силы тяжести на)Полняюш:его ее ма;териала «а впускную задвижку, применены рычаги, шарвнрно соединённые с одной 1стор1оны со стеной здания и камерой, а с дру.гой стороны - между собой, и овязааные тягой с малым плечом впуск1ной задвижки, а с целью воздействия прн этом на выпускную задвижку камеры, на пути движения ролика скипа, установлены рычаги, связанные тросом с защелкой выпускной за1движки.
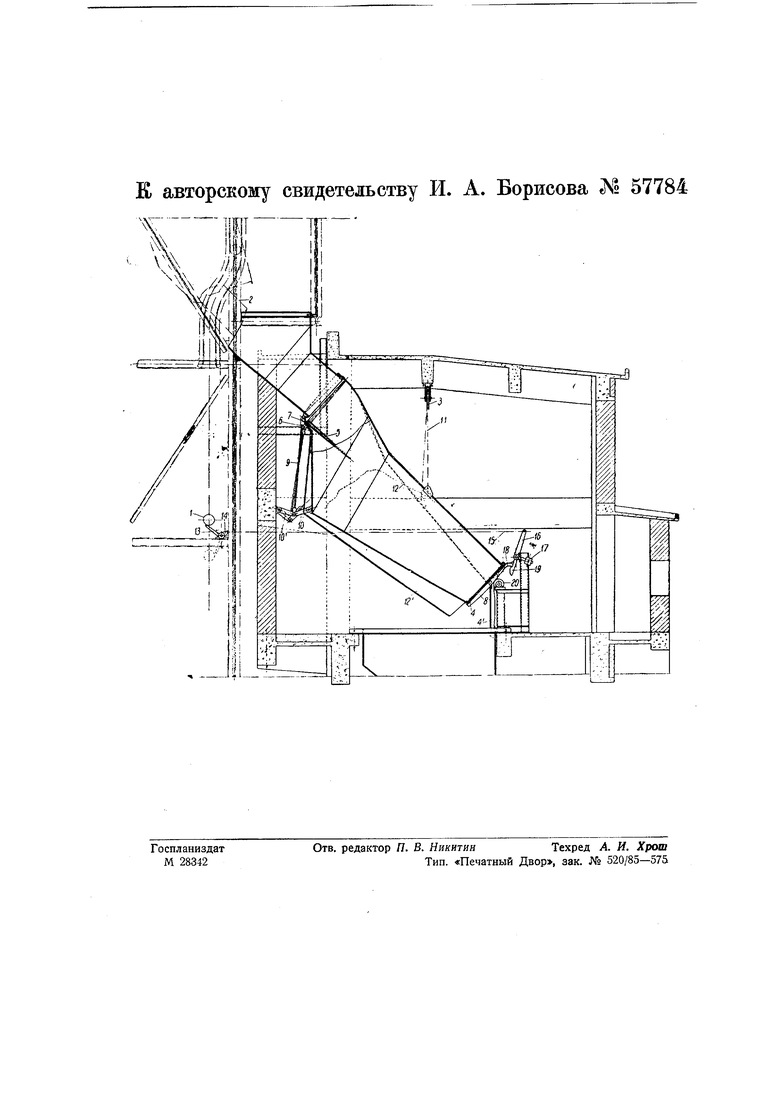
На чертеже представлены две камеры такого устройстша, располк женные одна за другой и действующие попеременно.
По пути вертикального движения скипа 2 расположен двуплечий ры1чаг 13, 14, плечо 13 которого ы нормальном положении направлено кверху и
при прохождении: ролика / скипа .вверх слегка отклоняется кверху, приходя затем iB свое нормальное положение, при движении же ролика вниз переводится им в положение, показанное на чертеже пункти1ром.
Камера 12, емкость которой несколько больще емкости скипа или клети, снабжена двумя задвижками, одна из которых нижняя 4 является выпускной, а другая - верхняя 5 - впускной.
Нижняя задвижка 4 имеет на наружной поверхности сегментное ребро 8, центроМ кривизны которого служит точка вращения верхней задвижки; задвижка 4 касается этим ребром опорного ролика 20, удерживающего заД|ВйЖ1ку 4 в закрытом состоянии. Кроме того-, задвижка 4 снабжена хвостовым крючком 18, находящимся, при незаполненном состоянии камеры 12 и закрытой задвижке 4, в зацеплении с зу|бцом 19 трехплечего рычага-защел)К1и 16, .стремящимся под влиянием контргруза 17, помещенного на одном из его плеч, повернуться в направлении по часШой стрелке, удерживая зубец 19 в сцеплении с хвостовиком 18. Верхнее плечо трехплечего рычага защелки 16 при помощи троса 15 связано с плечом 14
рычага 13, 14, удерживая его в положении, показаином на чертеже сплошными ЛИНИЯМИ.
Верхняя задвижка 5, шариирно укрепленная на оси 7 в стенках камеры 12, своим малым плечом 6 связана при ПОМОЩИ тяги 9 с двумя рычагами Ю, 10, один из которых шарнирно соединяет тягу 9 с камерой 12, а другой - со стенкой здания.
Две соседние камеры 12 и 12 при помощи троса 11, перекинутого через блок 3, поддерживаются на весу таким образом, что при опускании одной из них, проиСХодит нодъем другой, и наоборот..
В показанном на чертеже положении передняя камера 12 находится в своём верхнем положении; ее впускная за1движка 5 открыта, а выпускная 4 закрыта. Задняя же камера 12 находитбя в нижнем положении после выгрузки, ее выпускная задвижка открыта, а впускная закрыта.
При движении скипа 2 вверх, ролик 1, задевая за рычаг 13, отклоняет его кверху, ослабляя трос 15. Но рычаг 16 при этом остается под действием груза 17 ъ Положении сцеллеН1ИЯ с хвостовиком 18. После прохождения ролика 1, рычаг 13, 14, под действием собственной тяжести или пружины, возвращается в свое прежнее иоложение.
ПрИ происходящей затем, вследствие опроки1дывания окипа 2, загрузке передней камеры 12, последняя удер(живает1ся сцеплением хвостовика 18 с крючком 19 и роликом 2О, подпираю щим зйдвижку 4, неподвижно в своем верх1нем положении. Но когда сжип 2 уже в разгруженном состоянии-, огГускаясь вниз, заденет роликом: / за рычаг 13 и заставит его повернуться 0 положение, показанное на чертеже пунктиром, то трос 15, соединяющий рычаг 14 с защелкой 16, повернет последнюю и зубец 19 освободигг хвостовик 18, благодаря чему камера 12, под действием веса загрузки, начнет откло1няться книзу, катясь ребром 8 своей задвижки 4 по ролику 20 до тех пор, пока хвостовик 18 не
упрется в ролик 20. При дальнейшем опускании камеры вниз, ролик 20 заставляет задвижку открыться, и материал, находящийся в камере, высыпается в расположенный под ним бункер.
Во вре.мя этого движения камеры 12, рычаги 10, 10 сходятся, и тяга 9 заставляет короткое плечо 6 задвижки 5 повернуться и закрыть ее.
За это время рычаг 16 успевает притти под действием контргруза 17 в исходное положение и также через трос 15 вернуть в прежнее положение рычаг 13, 14.
В то же самое время передняя камера 12, опускаясь, заставляет заднюю камеру 12 подниматься, причем ребро его задвижки 4, катясь по своему ролику 20, заставляет задвижку 4 закрыться и в конце подъема камеры 12 хвосто®ик 18 его задвижки 4 заскакивает за зубец 19 трехплечего рычага, приводя камеру 12 в верхнее положение, показанное на чертеже для камеры 12.
В это же время рычаги 10, Ш распрямляются и через тягу 9 заставляют верхнюю задвижку 5 открыться.
Предмет и з О: б р е т е н .и я.
Герметическое разгрузочное устройство для скипов и опрокидных клетей с использованием веса проходящего через устройство материала для автоматического управления .впускной и выпускной задвижками герметической камеры устройства, отличающееся тем, что, с целью воздействия при повороте камеры J2 вокруг неподвижной оси под влиянием силы тяжести наполняющего его материала на впускную задвижку, применены рычаги 10, 10, шарнирно соединенные с одной стороны со стенкой здания и камерой 12, & с другой -между собой и связанные тягой с малым плечом впуркной задвижки, а с целью вшдействия при этом на .вьшускную задвижку камеры, на пути движения ролика скипа установлены рычаги 13, 14, связанные тросом 15 с защелкой 16 выпускной задвижки 4.