Отличительная особенность описываемого ниже интерполирующего устройства, предназначенного для систем программного управления фрезерным станком, заключается в применении трех электромеханических интеграторов, состоящих каждый из электронного усилителя, двигателя переменного тока и тахогенератора.
Предлагаемое интерполирующее устройство предназначено для производства интерполяции согласно формуле Гаусса.
По сравнению с другими формулами формула Гаусса после некоторых преобразований приобретает вид, более удобный для построения на ее основании интерполирующего устройства. Формула Гаусса для интерполирования по четырем точкам может быть реализована с помощью трех интеграторов, причем -при переходе от одного интерполяционного интервала к другому на вход первого интегратора нужно подавать новую величину подинтегральной функции, тогда как на двух других интеграторах они устанавливаются автоматически. Тем самым значительно упрощается устройство и сокращается количество необходимой информации.
При использовании других формул этого преимущества не имеется, так как после каждого интервала нужно вводить подинтегральные значения функций на все три интегратора сразу.
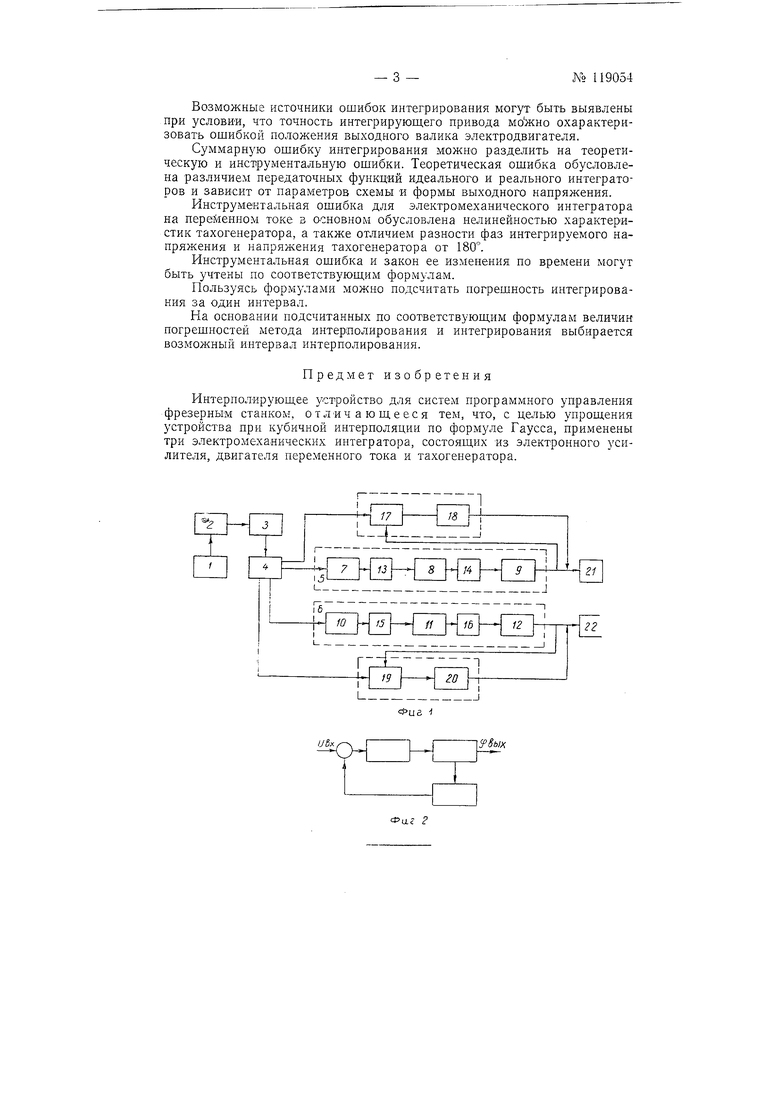
На фиг. 1 изображена скелетная схема интерполирующего устройства; на фиг. 2 - структурная схема электромеханического интегратора.
Изображенная на фиг. 1 скелетная схема интерполирующего устройства разработана для управления по заданной программе двумя подачами фрезерного станка. На схеме приняты следующие обозначения: / - устройство для ввода независимой переменной; 2,3,4 - программирующее, читающее и запоминающее устройства; 5, 6 - интерполяторы;
№ 119054- 2 -
7, 8, 9, 10, 11, 12 - интеграторы; 13, 14, 15, 16 - вращающиеся трансформаторы; ,Д, 19-1- схемы сравнения; 18, 20 - следящие системы; 21, 22 - сельсины.
Програмщфующее устройство представляет собой перфорированную ленту с нанесенными на ней в двоичном коде значениями разностей третьего порядка и координат опорных точек. За независимую переменную принимается текущее время. Вводится оно в программирующее устройство при помощи электродвигателя со стабилизированной скоростью.
Читающее устройство содержит фотоэлементы, которые считывают сигналы, зарегистрированные на перфорированной ленте.
Код числа, полученный в читающем устройстве, преобразуется в электрическое напряжение и запоминается в соответствующем устройстве. Преобразование кода числа в напряжение производится с помощью счетчика и электродмагнитных реле.
Собственно интерполятор состоит из трех электромеханических интеграторов. С выходными валиками интерполяторов связаны сельсины.
Сигналы с однофазных обмоток сельсинов записываются на магнитную ленту, которая зате.м является программирующим элементом для управления станком.
В тех случаях, когда интерполирующее устройство находится у станка, результаты интерполирования поступают непосредственно в следящие системы, управляющие подача.ми. Задачей корректирующей системы является устранение погрещностей из подинтегральной функции третьего интегратора и выхода в конце каждого интервала интерполирования.
Корректирующее устройство содержит электронную схему сравнения и следящую систему. Так как известны значения координат опорных точек обрабатываемой поверхности, то можно произвести сравнение желаемой величины и полученной на выходе.
В конце каждого интервала интерполирования из запоминающего устройства на схему сравнения корректирующего устройства подается величина напряжения, пропорциональная координате опорной точки. Туда же поступает напряжение от линейного потенциометра, связанного с выходным валиком интерполятора, пропорциональное углу поворота выходного валика интерполятора.
Корректирующее устройство с помощью следящей системы полученную поправку вводит в подинтегральную функцию третьего интегратора и на выход.
Погрещность в подинтегральной функции второго интегратора отсутствует, так как третья разность, вводимая на вход первого интегратора, берется с учетом возможной погрешности. Для этой цели строится расчетным путем или снимается экспериментально семейство кривых, выражающих зависимость утла поворота в функции времени -f(i) для различных входных напряжений. Пользуясь этими кривыми, можно выбрать необходимое Ug. пропорциональное третьей разности, так, чтобы в конце интервала интерполирования получить на выходе требуемый угол поворота.
В случае, если обрабатываемое изделие ограничено прямыми линия.ми, то программирование нужно производить с помощью только одного интегратора, вводя на его вход первые разности.
Точность работы интерполирующего устройства в основном определяется точностью работы интеграторов.
Структурная схема электромеханического интегратора представлена на фиг. 2.
Возможные источники ошибок интегрирования могут быть выявлены при условий, что точность интегрирующего привода можно охарактеризовать онлибкой положения выходного валика электродвигателя.
Суммарную ошибку интегрирования можно разделить на теоретическую и инструментальную ошибки. Теоретическая ошибка обусловлена различием передаточных функций идеального и реального интеграторов и зависит от параметров схемы -и формы выходного напряжения.
Инструментальная ошибка для электромеханического интегратора на переменном токе з основном обусловлена нелинейностью характеристик тахогенератора, а также отличием разности фаз интегрируемого напряжения и напряжения тахогенератора от 180°.
Инструментальная ошибка и закон ее изменения по времени могут быть учтены по соответствующим формулам.
Пользуясь формулами можно подсчитать погрешность интегрирования за один интервал.
На основании подсчитанных по соответствующим формулам величин погрешностей метода интерполирования и интегрирования выбирается возможный интервал интерполирования.
Предмет изобретения
Интерполирующее з стройство для систем программного управления фрезерным станком, отличающееся тем, что, с целью упрощения устройства при кубичной интерполяции по формуле Гаусса, применены три электромеханических интегратора, состоящих из электронного усилителя, двигателя переменного тока и тахогенератора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Круговой интерполятор | 1978 |
|
SU798730A1 |
| Круговой интерполятор для контурных систем программного управления станками | 1973 |
|
SU499556A1 |
| Линейный интерполятор | 1982 |
|
SU1042038A1 |
| Интерполятор | 1978 |
|
SU765821A1 |
| Линейный интерполятор | 1973 |
|
SU628500A1 |
| Линейный интерполятор | 1978 |
|
SU698012A1 |
| Интерполятор | 1986 |
|
SU1334167A1 |
| Устройство для программного управления толщиной стенки заготовки | 1982 |
|
SU1074733A1 |
| Устройство для программного управления | 1987 |
|
SU1427333A1 |
| Многоканальный интерполятор функций | 1986 |
|
SU1361588A1 |
