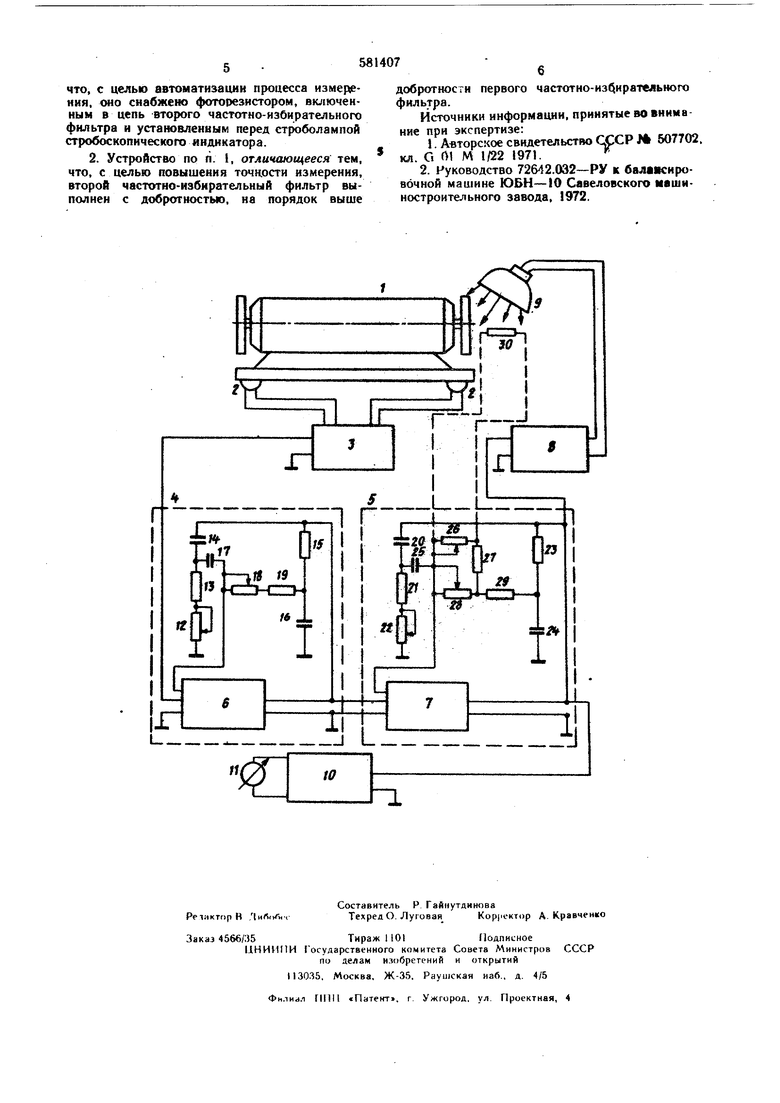
Изобретение относится к машиностроению и может использоваться при балансировке высокоскоростных электрических машин в сборе. Известно измерительное устройство балансировочного станка, содержаш,ее последовательно соединенные датчик дисбаланса, блок настройки станка, избирательный усилитель и частотно-избирательный фильтр, который управляется от генератора опорного сигнала, состояш.его из источника освещения, фотодиода и контрастной метки на роторе 1. Это устройство не может нормально функционировать при неоднородной отражающей поверхности роторов, например поверхности коллекторов или стальных пакетов с пазами. Кроме того, при балансировке электрических машин в сборе затруднены установка и регулировка положения генератора опорных сигналов. Наличие только одного частотно-избирательного фильтра не позволяет очистить сигнал от помех ближних и дальних частот. Так, при осуществлении достаточной фильтрации помех дальних частот можно получить чрезмерно узкую полосу пропускания резонансной характеристики фильтра, что затрудняет его настройку, и при выборе требуемой полосы пропускания, удобной для настройки фильтра и удовлетворяющей условию фильтрации помех ближних частот, можно получить недостаточную фильтрацию помех дальних частот. Наиболее близко к предлагаемому устройству по технической суш,ности измерительное устройство, содержащее последовательно соединенные датчик дисбаланса, блок разделения сигнала дисбаланса по плоскостям коррекции, два частотно-избирательных фильтра с одинаковой добротностью, каждый из которых имеет несимметричный двойной Т-четырех-полюсник, образованный низкоимпедансными и высокоимпедансными RC-ценями с ручной настройкой на частоту вращения ротора с помощью переменного резистора, индикатор величины дисбаланса и стробоскопический индикатор дисбаланса 2. Настройка этого устройства на частоту вращения производится вручную. Кроме того, выполнение обоих частотно-избирательных фильтров с одинаковой добротностью усложняет настройку измерительного устройства, так как при этом каждый фильтр настраивается отдельно при выключении одного из них, что снижает точность измерения. Это неудобство особенно ощутимо при нестабильной частоте вращения балансируемого ротора или при высокой добротности частотно-избирательного фильтра. Целью изобретения яв..яется автоматизация процесса измерения и повышение точности измерения. Для этого предлагаемое устройство снабжено фоторезистором, включенным в цепь второго частотно-избирательного фильтра и установленным перед строболампой стробоскопического индикатора. ,Второй частотно-избирательный фильтр выполнен с добротностью, на порядок выше добротности первого частотно-избирательного фильтра. г чертеже дана схема описываембго устройства. Оно содержит последовательно соединенные с pOTOfKiM I уравновешиваемой электрической машины датчики 2 дисбаланса, которые могут располагаться в опорах балансировочного станка или в корпусе уравновешиваемого ротора I; блок 3 разделения сигнала дисбаланса по плоскостям коррекции, два частотно-избирательных фильтра 4 и 5, образованных усилителями 6 и 7, в цепях обратной связи которых включены несимметричные двойные Т-четырехполюсникн. Второй фильтр 5 выполнен с большей добротностью и на его выход подключена нагрузка в виде усилителя-ограничителя 8 с импульсным входом, работающего на строболампу 9 стробоскопического индикатора угла днсбаланса. Выход второго фильтра соединен с входом согласуюшего усилителя 10, на выходе которого установлен индикатор II величины днсбаланса. Двойные Т-четырехполюсники первого K второго фильтров образованы сопротивлениями и емкостями 12-16 - пе)вичные низкой пслансные цепички, а 17-19 - вторичные высокоимпедансные цепочки первого фильтра, 20--24 - первичные низкоимпедансные цепочкн, а 25-29 - вторичные высоконмпедансные3 цепочки второго более высокодобротного фильтра. Параллельно резистору 26 включено фотосопротивление 30, установленное перед строболампой 9. Ручная настройка в диапазоне первого и второго фильтров осуществляется соответст-4 венно переменными резисторами 18 и 28, а добротнскть - переменными резисторами 12 и 22. Оперативная подстройка второго фильтра может быть осушествлена ручным способом, с помощью гк-ременного резистора 26 (резистор 27 ограничивает пределы этой регулировки) ,4 или автоматически с помошью фотосопротивленин 30, освешаемого строболампой 9. При врашении ротора I уравновешиваемой электрической машины на рабочей частоте ,ft. из-ja его неуравновешенности возникают цент-5 робежные силы, действуюшие на датчи.ки 2 дисбаланса. Возникаюшие при этом в датчиках 2 электрические сигналы дисбалансов с частотой fpas поступают на блок 3 разделения сигнала дисбаланса. Блок 3 осуществляет раздельную балансировку ротора по заранее вы-5 бранным плоскостям коррекции в зависимости от конструктивных параметров ротора 1. По желанию оператора с выхода блока 3 на вход системы двух последовательно соединенных резонансных частотно-избирательных фильтров 4 и 5 может коммутироваться для дальнейшей фильтрации и усиления любой из сигналов, содержаших информацию о дисбалансе в одной из плоскостей коррекции. Для обеспечения работы частотно-избирательных фильтров оператор до начала процесса уравновешивания с помощью перемецных резисторов 12 и 22 выставляет необходимые значения добротностей обоих фильтров. Затем он с помощью переменных резисторов 18 н 28 настраивает последовательно фильтры 4 и 5 на рабочую частоту fpoS при вращении эталонного ротора. Эта настройка производится по максимальным показателям индикатора II, стоящего на выходе согласующего усилнтеля 10. Основной оперативной подстройкой второго фильтра при работе является автоматическая подстройка с помощью фотосопротивления 30, освещаемого строболампой 9, предназначенной для измерения угла дисбаланса стробоскопическим способом. Фотосопротивление 30 обладает значительной инерцией, поэтому его сопротивление оказывается обратно пропорциональным интегральной освещенности, создаваемой на его чувствительной поверхности строболампой 9. Эта интегральная освещенность пропорциональна числу вспышек строболампы в секунду, т.е. частоте вращения ротора. Таким образом, при увеличении частоты вращения ротора величина сопротивления 30 уменьшается, что увеличивает резонансную частоту второго более высокодобротного фильтра 5, т.е. фильтр 5 следит за частотой вращения ротора, автоматически подстраиваясь на резонанс. Согласование изменения сопротивления 30 и частоты вращения ротора подбирается изменением расстояния сопротивления 30 от строболампы 9. Таким образом, в предлагаемом устройстве осуществляется автоматическая подстройка на частоту вращения ротора, имеется возможность оперативиой подстройки ручным способом с помощью только одного переменного резистора, обеспечивается необходимая точного уравновешивания эквивалентная добротность фильтров QgKQ Qi Qj iOOO (при Q, 10; 100) при согласованности требований фильтрации ближних и дальних частот помех. Предлагаемое устройство балансировочного станка при уравновешивании роторов высокоскоростных электрических машин в сборе плзволяет повысить точность определения угла и значения дисбаланса, автоматизирует процесс и повышает производительность уравновешивания. Формула изобретения I. Измерительное устройство балансировочного станка, содержащее последовательно соединенные датчик дисбаланса, блок разделения сигнала дисбаланса по плоскостям коррекции, два частотно-избирательны с фильтра, индикатор величины днсбаланса и стробоскопический индикатор угла дисбаланса, отличающееся тем.
что, с целью автоматизации процесса измерения, оно снабжено фоторезистором, включенным в цепь второго частотно-избирательного фильтра и установленным перед строболампой стробоскопического индикатора.
2. Устройство по ri. I, отличающееся тем, что, с целью повышення точкости измерения, второй частотно-избирательный фильтр выполнен с добротностью, на порядок выше
добротности первого частотно-избирательного фильтра.
Источники информацни, прииятые во внима
ние при экспертизе:rrt-o м, ЯП77О5
1. Авторское свидетельство (ХСРI 5077(И
г
кл. о 01 М 1/22 1971.
2. Руководство 72642.032-РУ к балавсировбчной машине ЮБН-10 Савеловского машнностроительного завода, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Балансировочный станок | 1979 |
|
SU823921A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ЭЛЕМЕНТОВ ДЕТАЛЕЙ МАШИН | 1993 |
|
RU2039957C1 |
| Измерительное устройство баланси-РОВОчНОгО CTAHKA | 1979 |
|
SU838479A1 |
| Балансировочный станок | 1990 |
|
SU1727011A1 |
| Измерительное устройство балансиро-ВОчНОгО CTAHKA | 1979 |
|
SU832376A1 |
| Балансировочный станок | 1974 |
|
SU531052A1 |
| Балансировочный станок | 1983 |
|
SU1144015A1 |
| Измерительное устройство к балансировочному станку для уравновешивания роторов | 1980 |
|
SU932328A2 |
| Измерительное устройство балансировочного прибора | 1988 |
|
SU1550345A1 |
| Способ настройки станка для балансировки коленчатых валов | 1983 |
|
SU1163169A1 |
X
1
(
Г,
