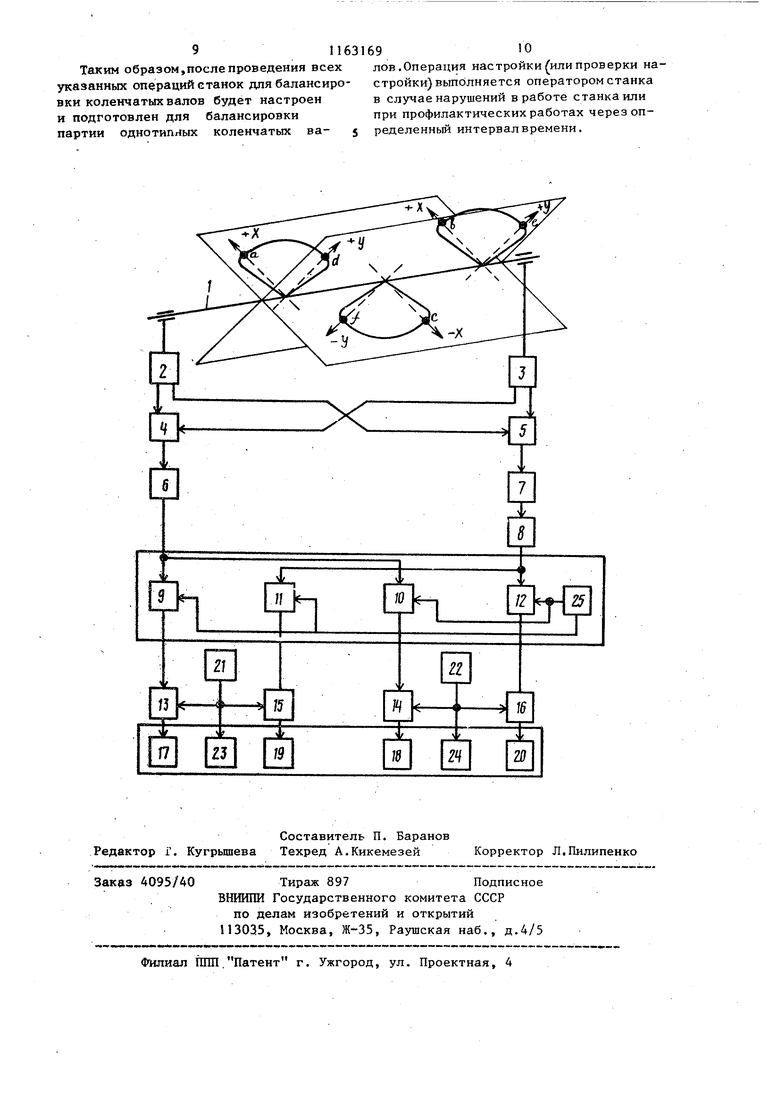
1 Изобретение относится к балансировочной технике и может быть испол зовано в станках для балансировки коленчатьпс валов с тремя плоскостями коррекции. Известен способ настройки станка для балансировки роторов, заключающийся в том, что устанавливают поочередно в каждую из заданных плоскостей коррекции первого из партии балансируемых роторов контрольный груз на известном радиусе и в известное угловое положение, для каждой плоскости измеряют зависимость показаний величины дисбаланса и тарируют измерительную систему стан- ка D . Недостаток этого способа наст.рой ки заключается в тбм, что он не учитьгоает особенностей настройки балансировочных станков с фиксирова ными системами координат, в которых работают станки для балансировки коленчатых валов с тремя плоскостями коррекции, I . , Наиболее близким по технической сущности к изобретению является способ настройки станка для баланси ровки коленчатых валов, включающего опоры и измерительные каналы, заклю чающийся в том, что на опоры станка устанавливают эталонный коленчатый вал с четырьмя противовесами, имеющими каждый по дне ортогональные оси коррекции, закрепляют на край-г нем противовесе коленчатого вала контрольный груз, при вращении коленчатого вала разделяют вторую плоскость коррекции, переставляют контрольный груз на второй крайний противовес в той же осевой плоскости, что и для первого край-, него противовеса, при вращении коленчатого вала разделяют первую плоскость коррекции, устанавливают цену деления измерительного канала второй плоскости коррекции, переста вляют контрольный груз на первый крайний противовес, при вращении коленчатого вала устанавливают цену деления измерительного канала первой плоскости коррекции и удаляют контрольный груз. В случае баларсировки ротора в двух плоскостях коррекции и в поляр ной системе координат способ обеспечивает необходимую точность настройки балансировочного станка L2J . 92 Недостаток известного способа за ключается в том, что при настройке станков для балансировки коленчатых валов с тремя плоскостями коррекции не обеспечивается настройка измерения проекций дисбаланса в осевых плоскостях коррекции, что приводит к снижению точности измерения и коррекции дисбаланса и, как следствие, к снижению точности балансировки. Целью изобретения является повышение точности балансировки. Поставленная цель достигается тем, что согласно способу настройки станка для балансировки коленчатых валов, включающего опоры и измерительные каналы, заключающемуся в том, что на опоры станка устанавливают э талонный коленчатый вал с четырьмя противовесами, имеющими каждый по две ортогональные оси коррекции, закрепляют на крайнем противовесе коленчатого вала конт рольный груз, при вращении коленчатого вала разделяют вторую плоскость коррекции, переставляют контрольный груз на второй крайний противовес в той же осевой плоскости, что и для первого крайнего противовеса, при вращении коленчатого вала разделяют первую плоскость коррекции, устанарливают цену деления измерительного канала второй плоскости коррекции,переставляют контрольный груз на первый крайний противовес,при вращении коленчатого вала устанавливают цену деления измерительного канала первой плоскости коррекции и удаляют контрольный груз, на каждом из двух средних противовесов по осям коррекции, расположенным в первой осевой плоскости, закрепляют одновременно по контрольному грузу и при вращении коленчатого вала устанавливают цену деления измер1 тельного канала третьей плоскости коррекции, снимают оба контрольных груза 1л анало гично устанавливают цену деления измерительных каналов каждой плоскости коррекции по второй осевой плоскости,ортогональной пе1звой. На чертеже изображена структурная схема измерительного устройства к станку для балансировки коленчатых валов с тремя плоскостями коррекции, настраиваемому по данному способу. 3 Эталонный коленчатый вал 1 с че тырьмя противовесами, двумя край ними и двумя средними, обобщенными как эквивалентный средний прсггивовес, образующими три плоскости кор рекции, на которых через X и Y обозначены оси коррекции, расположенные под углом 90 , подготовлен специально для настройки стачка, Через оси коррекции и ось обработки коленчатого вала I проведены две перпендикулярные плоскости коррекции. Через a,b,c,d,e,f обозначены точки, лежащие на проти вовесах коленчатого вала и на осях коррекции. В этих точках есть отверстия с резьбой для установки контрольный грузов (не показаны Точки а,Ь,;с расположены в осевой плоскости X , а точки d, е, f - в осевой плоскости . Измерительные каналы первой и второй плоскостей коррекции выполнены соответственно в виде последовательно соединенных датчика2 (З) дисбаланса, суммато ра А (5), усилителя 6 () и фазовращателя 8 (только для второй пло кости коррекции). Второй вход сумматора 4 соединен с выходом датчика 3, а второй вход сумматора 5 с выходом датчика 2. Для разложени дисбаланса на проекции X и каждый измерительный канал плоскости коррекции содержит две цепи, вьшол ненные каждая в виде последователь соединенных синхронного детектора (10-12), сумматора J3 (14-16) и индикатора 17 (18-20) проекций дис баланса. Измерительные каналы треть ей плоскости коррекции для каждой осевой плоскости выполнены каждый в виде последовательно соединенных регулируемого источника21 (22) постоянного напряжения и индикатора 23 (24 проекций дисбаланса. Устройство содержит также генератор 25 опорных сигналов, первый выход которого связан с вторыми входами синхронньпс детектороь 9 и 1I проекций а и b первой осевой плоскости., второй выход - с вторым входами синхронных детекторов 10 и 12 проекций d и е второй осево плоскости, а выход каждого регулируемого источника 21 (22) связан также с вторыми входами суммато-. ров 13 и 15 (l4 и 16) соответствую щей осевой плоскости. 694 Способ настройки станка для балансировки коленчатых валов, включающего опоры и измерительные каналы, осуществляют следующим образом. На опоры станка устанавливается эталонный коленчатый вал 1, который приводится во вращение (элементы механической системы станка и привода вращения на схеме не показаны). На коленчатый вал 1 (изображен условно) закрепляют поочередно на каждый из крайних противовесов контрольный груз. Колебания опор станка, пропорциональные дисбалансу от контрольного груза, воспринимаются и преобразуются в электрический сигнал датчиками 2 и 3 дисбаланса. С помощью сумматоров 4 и 5, в состав которых входят потенциометры (не показаны), производится настройка цепи разделения плоскостей коррекции, совпадающих с крайними противовесами. Выходной сигнал сумматора 4 (5), пропорциональный дисбалансу, приведенному к плоскости крайнего противовеса, усиливается и фильтруется от помех усилителем 6 (7) и раскладывается на проекции в прямоугольной систёме координат с помощью синхронных детекторов 9 (fl) и 10 (l2), на управляющие входы которых приходят сдвинутые на 90° один относительйо другого выходные напряжения генератора 25 опорных сигналов. Выходные напряжения синхронных детекторов 912, пропорциональные проекциям дисбаланса в крпйних противовесах, измеряются и запоминаются индикаторами 17 и 19 проекций для осевой плоскости коррекцигт X и индикаторами 18 и 20 - для осевой плоскости Y . Каждый из индикаторов 17-20 проекций может быть реализован с помощью аналогово- го запоминающего устройства конденсаторного типа и включенного на его выход стрелочного прибора с нулем посередине, ток через который регулируется с помощью переменного резисто- ра. В индикаторах 23 и 24 проекций третьей плоскости корреции, выполняемых аналогично, может быть применен прибор с нулем на краю шкалы.Каждый из источников 21 и 22 постоянного напряжения может быть реализован, например, с помощью потенциометра, подключенного к плюсовой и общим шинам источника питания. Таким об5
разом, выходное напряжение каждого из источников 21 и 22 может изменяться оператором станка от нуля до напряжения шины источника питания.
В автоматическом варианте схемы источники 21 и 22 могут быть реализованы, например, с помощью генератора линейно изменяющегося напряжения. Перед началом измерения необходимо установить в нуль потенциометры., регулируемых источников 2 и 22 постоянного напряжения или отключить источники от схемы. Знаки измеренных проекций дисбаланса определяются по направленно отклонения стрелки индикаторов 17,19,Т8и 20 проекций дисбаланса, например, плюс отклонение вправо, а минус влево.
Рассмотрим проекций, расположенные в общей осевой плоскости коррекции X ) т.,е. плоскости, проходящей через ось вращения и направления коррекции, обозначенные на коленчатом валу 1 через 1X . Если на индикаторах 17 и 19 проекций, относящихся к осевой плоскости X , получены положительные знаки проекций, положение регулятора источника 21 (или не подключают его к схеме) , не изменяют, а считывают показания индикаторов 17 и 19 (18 и 20 для осевой плоскости ) , останавливают вращение «шинделя станка и связанного с ним коленчатого вала 1 и производят коррекцию дисбаланса в его крайних противовесах согласно показаниям индикаторов проекций (т.е. задача сводится к измерению двух плоскостей коррекции. Если на одном из индикаторов ( например, 19), относящихся к осевой плоскости X получено отрицательное значение проекции, то начинают изменять выходное напряжение источника 21 верх от нуля полярность источника совпадает с полярностью положительной проекции на выходе синхронных детекторов). Так как выход источника 21 соединен с входами обоих сумматоров 13 и 15, то показания индикаторов 17 и 19 начнут изменяться: в индикаторе 17 положительная проекция возрастает, а в индикаторе 19 абсолютное значение отрицательной проекции уменьшается. Одновременно появляются по631696
казания на индикаторе 23, относящемся к средней плоскости коррекции осевой плоскости )( . В тот момент, когда показания индикатора 19 станут равны нулю, прекращают регулировку напряжения источника 21, Показания индикатора 17 будут равны сумме абсолютн1 1х значений отрицательной и положительной проекций в осевой
0 плоскости X , а показания индикатора 23 будут равны удвоенной отрицательной проекции, так как масштаб измерения индикаторов 23 и 24 отличается от масштаба других индикаторов в два раза. Все индикаторы проекций градуируются в единицах коррекции. После аналогичных измерений в осевой ПЛОСКОСТИ Y останавливают вращение коленчатого вала I и производят коррекцию дисбаланса в первой и третьей плоскостях коррекции для координат X , а для координат Ч согласно показаниям индикаторов 18, 20 и 2А. В случае получения на инди25 ,каторах 17 и 19 двух отрицательных проекций, увеличивают выходное напряжение источника 21 до тех пор, пока большая по абсолютной величине из проектгий (например, на индикаторе 19) не станет равной нулю., и включают вращение балансируемого коленчатого вала. Показания индикатора 17 будут в элом случае равны разности абсолютных значений про«. екций, а индикатора 23 - удвоенному значению проекции, большей по абсолютному значению (на индикаторе 19). Аналогично описанному измеряются проекции дисбаланса коленчатого вала в осевой плоскости коррекции .
Допустим, на опоры станка установлен эталонный коленчатый вал, дисбаланс которого меньше допустимого в 3-5 раз (при изменении дисбаланса приборы показьгоают О). Необходимая точность балансировки эталонного вала может быть получена методом обхода грузами. В про
S тивовесах коленчатого вала подготовлены места (например, отверстия с резьбой) для установки контрольных грузов, которые совпадают с разрешенными осями коррекции дисбаланса в ;
55 противовесах (точки а, Ь, с, d, е, f ). Устанавливают контрольный груз в точку Ь. Дисбаланс,создаваемый контрольным грузом при установке
. 7
на противовес коленчатого вала, дол жен быть в 10-15 раз выше допускаемого дисбаланса. Включают вращение шпинделя станка и следят за показаниями индикаторов 17,19 18 и 20 про екций дисбаланса. Так как оси проекций могут не совпадать с осями коррекции, то помимо показаний на индикаторе 19, соответствующего точке Ь могут быть показания на индикаторе 20 и на индикаторах 7 и 18 от влияния дисбаланса, создаваемого контрольным грузом, на левую опору балансировочного станка. Потенциометром схемы разделения плоскостей коррекции, входящим в состав сумматора А, устанавливают стрелки приборов индикаторов 17 и 19 в нулевое положение, отключают вращение шпинделя станка и переносят контрольный груз из точки Ь в точку а. Аналогично описанному потенциометром, входящим в состав сумматора 5, устраняют влияние дисбаланса от конт рольного груза на правую опору станка. Таким образом, схема разделения плоскостей коррекции настроена. Не снимая контрольного груза (он расположен в точке а), расфиксируют статор генератора 25 опор- ных сигналов и, медленноповорачивая его вокруг оси вращения ротора, добиваются максимума показаний индикатора 17, минимума показаний нуля) индикатора 19 и фиксируют статор в найденном положении. В результате оси измерительной системы координат совпадут с осями коррекции в левом противов1исе коленчатого вала {оси X иУ через точки а и d соответственно). Далее переменным резистором, входящим в состав индикатора 17, устанавливают количество делений прибора, соответствующее поставленному контрольному грузу, т.е. устанавливают цену деления по координате X в левом противовесе коленчатого вала (на этой координате лежит точка а) . Останавливают вращение коленчатого вала, перекосят контрольный груз в точку Ь, включают вращение .коленчатого вала и с помощью фазовращателя 8 добиваются максимума показаний индикатора 19 и минимума показаний нуля ин индикатора 20 и, таким образом, устраняют фазовые ошибки (по сравнению с противоположным измерительным
69. 3 .
каналом) в измерительном канале правой- плоскости измерения, так как добиться полной идентичности фазовы характеристик в обоих измерительных каналах очек трудно из-за наличия в усилителях 6 и 7 избирательных фильтров и разньпс характеристик левой и правой опор станка. Фазовращатель 8 может быть реализован с помощью операционного усилителя, на входе которого установлен RCфильтр первого порядка, изменяя параметры которого, например R, можно изменять фазу выходного напряжения от О до - .180 без изменения амплитуды. Затем с помощью переменного резистора, входящего в состав индикатора 19, устанавливают цену деления, аналогичную цене деления .
для точки а , по координате X
для правого противовеса Кбленчатого
вала (на этой координате лежит точка Ь), отключают вращение коленчатого вала, снимают контрольный груз с правого противовеса колейчатого вала и устанавливают по одному грузу на каждый из двух средних противовесов (на чертеже они объединены в один) в точку с, лежащую на координате X , и по методике, описанной выше с помощью источника 21 , измеряют параметры сигнала, пропорционального поставленным грузам. По окончании измерения на всех индикаторах, кроме индикатора 23, будет нулевые показания. Переменным резистором, входящим в состав индикатора 23, устанавливают, такое же количество делений прибора индикатора 23, как и для индикаторов I7 и 19. Цена деления будет в этом случае в два раза больше, чем для крайних противовесов коленчатого вала. Таким образом, на индикаторах, относящих к осевой плоскости коррекции ции X , цена деления будет выставлена. Затем снимают оба контрольных груза и, поочередно закрепляя контрольный груз в точках, d, е, f, расположенных в осевой плоскости коррекции Y , сначала в каждом из крайних противовесов, а одновременно по одному контрольному грузу на каждый из двух средних противовесов в каждом случае выставляют цену деления соответствующего индикатора 18 , 20 и 24 измерения проекции, aiitfлогичную единицам коррекции в осевой плоскости X.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1264018A2 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1096510A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Способ балансировки коленчатых валов с тремя плоскостями коррекции (его варианты) | 1981 |
|
SU1000813A1 |
| Способ настройки балансировочного станка | 1984 |
|
SU1388735A1 |
| Измерительное устройство к балансировочному станку | 1977 |
|
SU658418A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1037094A2 |
СПОСОБ НАСТРОЙКИ СТАНКА ДЛЯ БАЛАНСИРОВКИ КОЛЕНЧАТЫХ ВАЛОВ, включающего опоры и измерительные каналы, заключающийся в том, что на опоры станка устанавливают эталонный коленчатый вал с четырьмя противовесами, имеющими каждый по две ортогональные оси коррекции, закрепляют на крайнем противовесе коленчатого вала контрольный груз, при вращении коленчатого ва ла разделяют вторую плоскость коррекции, переставляют контрольный груз на второй крайний противовес в той же осевой плоскости, что и для первого крайнего противовеса, при вращении коленчатого вала разделяют первую плоскость коррекции, устанавливают цену деления измерительного канала второй плоскости коррекции, переставляют контрольный груз на первый крайний противовес, при вращенииколенчатого вала устанавливают цену деления измерительного канала первой плоскости коррекции и удаляют контрольный .груз, о т л ичающийся тем, что, с целью повьщ1ения точности балансировки, на каждом из двух средних противовесов по осям коррекции, расположен(/) ным в первой осевой плоскости, закрепляют одновременно по контрольному грузу и при вращении коленчатого вала устанавливают цену деления измерительного канала третьей плоскости коррекции, снимают оба контрольных груза и аналогично устанавливают цену деления измерительных каналов каждой плоскости коррекции во второй осевой плоскости,ортогональной nepBoii.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ настройки балансировочного станка | 1975 |
|
SU530212A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппаратура для балансировки в двух плоскостях | |||
| Камера горения для двигателей внутреннего горения | 1925 |
|
SU2504A1 |
| Проспект фирмы Брюль и Кьер, Дания, Копенгаген, 1983 | |||
