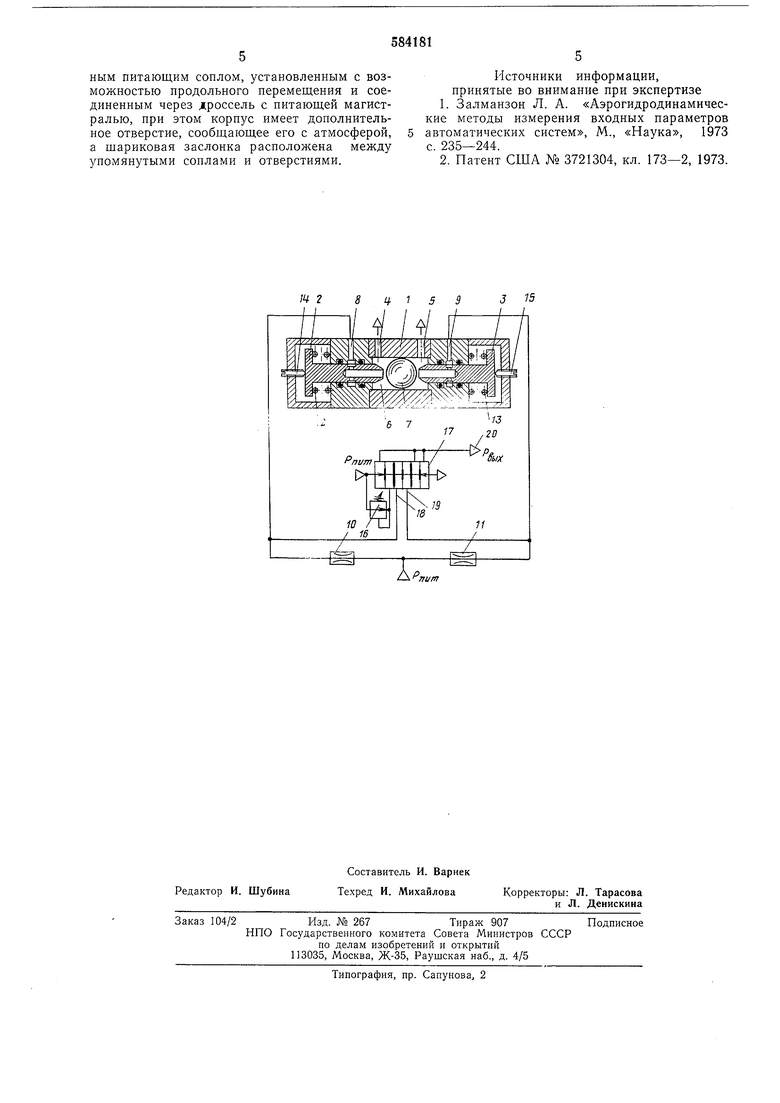
строосциллирующем движении около среднего положения. В основу такого решения положены следующие явления. При наличии угла крена сила веса шариковой заслонки на наклонной плоскости разлагается на силу скатываиия и силу нормального давления. При небольших расходах ч&рез питающий дроссель и острых кромках сопла сила его .реакции /грс равна избыточному давлению Рс в сопле, умноженному на его площадь F,, P,.S,(Г) При наклоне датчика шарик, скатываясь, будет закрывать сопло до тех пор, пока сила реакции сопла не нарастет до величины скатывающей силы и не станет равной ей, т. е. F - F ск - рс Р -Sina. Другими словами, избыточное давление в сопле будет пропорционально при прочих постоянных условиях синусу угла наклона, а при малых углах, меньших 5°, величине самого угла. Наибольщая чувствительность датчика будет ири наибольщей величине производной изменения давления в сопле PC по изменению угла наклона датчика Да. Как известно, максимальная производная функции sin а достигается при угле . Поэтому при горизонтальном расположении сопел можно добиться максимальной чувсгвительности датчика. При горизонтальном расположении шарика величина силы трения, цропорциональиая силе нормального давления шарика на скатывающую плоскость, будет также максимальной, так как сила нормального давления пропорциональна косинусу угла наклона датчика, а имеет максимум при угле а равном 0°. Путем регулирования взаимного расположения сопел и шариковой заслонки между ними можно добиться быстроосциллирующих колебаний (высокочастотных автоколебаний) шарика относительного его среднего (нулевого) положения. Такие колебания, как известно, значительно уменьшают трение, а значит и зону нечувствительности к углам наклона в нормальных условиях. Кроме того, в условиях повышенных вибраций транспортных средств повышается надежность измерения, так как вибрационные колебания агрегата в датчике уменьшаются за счет собственных направленных колебаний шарика. Кроме того, датчик снабжен задатчиком нулевого уровня 16 и выходным устройством 17, собранным на мембранном усилителе ио схеме алгебраического сумматора, имеющего вычитающий вход 18, положительный вход 19 и выход 20. Этот сумматор необходим для определения разности избыточных давлений в питающих соплах, так как при нейтральном положении (нулевом) возможны ненулевые значения этих избыточных давлений. Использование алгебраического сумматора обеспечивает возможность путем введения нулевого уровня производить измерения знакопеременных углов наклона. Устройство работает следующим образом. При горизонтальной установке датчика и подаче питания шариковая заслонка 7 находится в быстроосциллирующем движении около среднего положения, в результате чего давление на входе сопел 2 и 3 нулю. Поэтому выходное устройство 17 выдает давление, определяемое задатчиком нулевого уровня 16. При наклоне датчика по его продольной оси, например, влево, шариковая заслонка 7 начнет без трения, которое устраняется быстроосциллирующим движением, скатываться к соплу 2, закрывая его до тех пор, пока сила реакции сопла 2 не нарастет до величины скатывающей составляющей веса щариковой заслойки 7. Так как сила реакции сопла при малых расходах воздуха через него равна давлению в сопле, умноженному на его площадь, а скатывающая составляющая веса шарика 7 при малых углах наклона ему пропорциона.льна, то при остановке щарика 7 возрастающей .силой реакции сопла 2 давление в нем будет пропорционально углу наклона датчика влево. Сигнал давления со входа сопла 2 поступает на вычитающий вход 18 мембранного усилителя выходного устройства 17. В результате этого на выходе 20 усилителя выходного устройства 17 будет установлено давление, равное разности давления нулевого уровня, которое определяется задатчиком нулевого уровня 16, и давления на входе сопла 2. Т. е. при наклоне датчика влево давление на его выходе 20 уменьщается от нулевого уровня пропорционально углу его крена влево. При наклоне датчика вправо шариковая заслонка начнет без трения перекатываться к соплу 3, в котором будут происходить аналогичные явления. Однако на выходе 20 датчика при этом давление будет нарастать от нулевого уровня пропорционально углу его крена вправо, так как давление со входа сопла 3 поступает на положительный вход 19 мембранного усилителя выходного устройства 17. Фор.мула изобретения Датчик угла наклона, содержащий корпус с цилиндрической камерой, сообщенной через отверстие с атмосферой, и расположенные в ней щариковую заслонку и питающее сопло, подключеиное через дроссель к питающей магистрали, отличающейся тем, что, с целью повышения чувствительности и надежности измерения, он снабжен размещенным по горизонтальной оси дополнительным питающим соплом, установленным с возможностью продольного перемещения и соединенным через дроссель с питающей магистралью, при этом корпус имеет дополнительное отверстие, сообщающее его с атмосферой, а шариковая заслонка расположена между упомянутыми соплами и отверстиями.
Источники информации, принятые во внимание при экспертизе
1.Залманзон Л. А. «Аэрогидродинамические методы измерения входных параметров
автоматических систем, М., «Наука, 1973 с. 235-244.
2.Патент США № 3721304, кл. 173-2, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки криволинейных поверхностей | 1987 |
|
SU1463447A2 |
| УСТРОЙСТВО ДЛЯ СЕПАРАЦИИ СЫПУЧЕЙ СМЕСИ | 1998 |
|
RU2132754C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2504815C2 |
| ТРАССОВАЯ САМОДВИЖУЩАЯСЯ МАШИНА ДЛЯ ОЧИСТКИ ДРОБЬЮ ТРУБ НЕФТЕГАЗОПРОВОДОВ | 2004 |
|
RU2281850C1 |
| СТРУЙНОЕ РЕЛЕ СКОРОСТНОГО НАПОРА | 1972 |
|
SU435490A1 |
| Устройство для обработки криволинейной поверхности | 1986 |
|
SU1351757A1 |
| Струйно-пневматическая система регулирования соотношения двух параметров | 2023 |
|
RU2817551C1 |
| Пневматический регулятор | 1960 |
|
SU137703A1 |
| Пневмовиброизолирующая опора | 1982 |
|
SU1044860A1 |
| Стабилизатор зарядно-разрядного тока для аккумуляторов | 1977 |
|
SU868923A1 |
W
пит
