Изобретение относится к самолетам с двумя или более двигателями, преимущественно турбореактивными двигателями и с отклоняемым вектором тяги.
Известно управление по направлению двухдвигательным самолетом с помощью разнотяги двигателей, установленных справа и слева от продольной оси самолета, см. Котик М.Г. «Динамика взлета и посадки самолетов», М.: Машиностроение, 1984, стр. 118-119. Неизвестно, но в принципе возможно управление самолетом по тангажу, если два или более двигателей расположены выше и ниже аэродинамического фокуса (хотя при проектировании самолета авиаконструкторы стараются не располагать двигатели таким образом). Однако управление разнотягой с помощью основных топливных насосов затруднительно из-за их большой погрешности. Кроме того, это приведет к ускоренном износу механизмов управления производительностью насосов.
Известны также самолеты, управляющиеся с помощью отклоняемого вектора тяги.
Цель данного изобретения - не только управление двухдвигательным самолетом по одному из параметров (направлению или тангажу), а трех- и более двигательными самолетами по двум этим параметрам с помощью разнотяги двигателей, но и, что еще важнее, стабилизация по этим параметрам, то есть отказ от килей, вертикальных рулей, стабилизаторов, горизонтальных рулей, механизмов и тяг управления ими. Это резко уменьшит аэродинамическое сопротивление самолета, увеличит весовую отдачу, уменьшит стоимость самолета.
Кроме того, не менее важной целью изобретения является реализация следящего (пропорционального) управления пространственным положением самолета в положении «хвостом вниз» для осуществления взлета и посадки и в таком положении перспективных самолетов. Без следящего управления направлением и тангажом самолета взлет и посадка в положении «хвостом вниз» становятся настолько трудными, что практически невозможны. С данной системой становятся возможными такие взлет и посадка на предназначенные для этого устройства по пат. России №2335437 (два столба с цепью между ними). Это позволит отказаться от шасси, то есть позволит еще более облегчить, упрочнить и удешевить самолет. Это позволит также уменьшить площадь крыла (особенно размах), так как взлет и посадка будут производиться из режима висения , и, следовательно, большая площадь крыла, закрылки, воздушный тормоз и тормозной парашют становятся ненужными.
Кроме того, целью данного изобретения является и управление по крену в режиме висения, когда элероны не работают. В данном изобретении предусмотрено обычное, то есть не следящее, а интегральное управление креном (как в обычном полете). Однако возможно и следящее управление креном, для чего система управления креном может быть построена точно так же, как, допустим, система управления тангажом, описанная ниже. Но делать этого не рекомендуется, так как в этом случае диапазон управления по крену будет ограничен в каком-то масштабе перемещением ручки управления.
Данный способ управления самолетом с двумя и более двигателями, заключающийся в дифференциальной подаче топлива в двигатели, отличается тем, что эта подача осуществляется наряду с основными топливными насосами двигателей еще и от дополнительной топливной системы (систем), приводимой в действие от приводной рессоры одного из основных двигателей или от электродвигателя и управляемой от гироскопической системы стабилизации-управления электрического или пневматического типа.
А устройство для осуществления этого способа состоит из системы (систем) дифференциальной подачи топлива, системы (систем) стабилизации-управления по направлению и/или тангажу и блока гироскопических датчиков.
Вариант 1. Простейшая система дифференциальной подачи топлива для регулирования по одному параметру (направлению или тангажу) состоит из насоса и управляемого трехходового крана (распределителя потоков). Привод насоса такой системы лучше осуществлять от электродвигателя, так как привод от приводной рессоры одного из основных двигателей чреват тем, что эффективность регулирования при изменении оборотов двигателя будет меняться от недостаточной на «малом газу» до избыточной на «максимале».
Для стабилизации-управления по двум параметрам (направлению и тангажу) нужно две такие системы. Причем топливный насос у них может быть общим. То есть такая система состоит из одного насоса и двух управляемых трехходовых кранов или трех или более управляемых клапанов.
У такой системы есть одна особенность - для нее в камере сгорания желательно иметь отдельную форсунку или кольцо форсунок, так как при соединении с форсунками основной топливной системы, точнее - с системами двух или более двигателей, разница давлений в них и даже разница давлений в камерах сгорания будет мешать стабильному распределению потоков топлива. То есть данный способ предполагает достаточно высокие требования к синхронности работы двух, а тем более - трех двигателей.
От этой особенности свободны следующие три варианта.
Вариант 2. В нем система дифференциальной подачи топлива для регулирования по одному параметру (направлению или тангажу) состоит из двух насосов регулируемой производительности. Причем оба насоса могут управляться одним исполнительным механизмом, см. фиг.5.
Вариант 3. В нем система дифференциальной подачи топлива для регулирования по одному параметру (направлению или тангажу) состоит из двух насосов с электродвигателями с регуляторами мощности, например, тиристорными, см. фиг.6.
Вариант 4. В нем система дифференциальной подачи топлива для регулирования по одному параметру (направлению или тангажу) состоит из двух или более основных топливных насосов, шунтированных управляемыми жиклерами, причем после насоса имеется датчик давления, соединенный с управляющим входом «меньше» усилителя системы стабилизации-управления, см. фиг.8.
Этот вариант требует небольшого, примерно 1%, запаса по производительности основных топливных насосов. А также он требует линейной характеристики управляемых жиклеров, то есть чтобы при одинаковом отклонении регулятора «больше или меньше» подача топлива менялась на одну и ту же величину, иначе в процессе регулирования будет немного меняться общая суммарная тяга всех двигателей. Такая характеристика достигается профилем иглы жиклера.
При любом из вариантов дифференциальной топливоподачи система стабилизации управления по одному параметру состоит из задатчика управления 3, соединенного через переключатель К 4 со входом пропорционально-интегрального регулятора 5 или со входом пропорционального регулятора 6, после чего выходы обоих регуляторов через тот же переключатель К 4 соединены со входом сумматора 7, с другим входом которого соединен также гироскопический датчик 8, а выход сумматора соединен со входом усилителя 9, выход которого, в свою очередь, соединен с исполнительным механизмом системы дифференциальной топливоподачи 10 и с блоком симметричного диодного тиристора 11, с выхода которого сигнал разного назначения поступает на исполнительные механизмы сопел управляемого вектора 13, и на эти же входы этих механизмов поступает сигнал разного назначения (туда и обратно) с концевых выключателей датчика 13 положения исполнительного механизма системы дифференциальной топливоподачи, причем в зависимости от типа исполнительного механизма он через датчик своего положения может иметь отрицательную обратную связь с входом усилителя 9, см. фиг.2.
Причем в электрическом варианте автоматики интегрирующим звеном регулятора является гироскоп такого же типа, как и гироскопический датчик, но его ротор неподвижен, и управляется сервоприводом от сигнала задатчика управления.
Блок симметричного диодного тиристора может и являться симметричным диодным тиристором, но для увеличения мощности таким блоком может являться схема из двух параллельных встречных цепей из последовательно соединенных диода и тиристора, к управляющим электродам которых подсоединены соответственно две цепи из последовательно соединенных динистора и резистора.
В пневматическом варианте автоматики блоком симметричного диодного тиристора являются два перепускных клапана в двух линиях разного назначения.
Знаки «+» и «-» при управлении постоянным током действительно могут соответствовать электрическому плюсу и минусу, но при управлении переменным током, тем более трехфазным, или при пневмоавтоматике они означают сигналы разного движения для исполнительных механизмов (туда и обратно).
Работает эта система так: сигнал задатчика управления ЗУ 3 в обычном полете подается через переключатель К 4 в положении 2 на пропорционально-интегральный регулятор 5 и далее с регулятора на сумматор 7, на который также подается сигнал с гироскопического датчика Г 8. Результирующий сигнал усиливается усилителем У 9 и далее подается на исполнительный механизм ИМ 10 системы дифференциальной подачи топлива (на фиг.2 это трехходовой кран 2) и на блок симметричного диодного тиристора СДТ 11. В зависимости от типа ИМ 10 может иметься обратная связь датчика его положения 13 на вход усилителя.
При такой передаче сигнала система, во-первых, с помощью датчика Г 8 реагирует на изменение положения самолета и стабилизирует полет по заданному параметру (направление или тангаж). Причем если эффективности разнотяги будет недостаточно, то датчик 13 положения исполнительного механизма одним из своих концевых выключателей (далее - «концевик», отдельно не показаны) через резисторы R медленно сдвигает в нужном направлении вектор тяги сопел с помощью исполнительных механизмов сопел ИМС 12 (последних может быть 2, 3 или более).
А во-вторых, система отрабатывает в интегральном режиме (то есть как на обычном самолете) команды летчика, подаваемые с помощью задатчика ЗУ 3, причем двухступенчато: мелкие коррекции отрабатываются с помощью разнотяги, то есть с помощью трехходового крана 2, а резкие команды вызывают большой сигнал с усилителя У 9, который превышает порог срабатывания блока симметричного диодного тиристора 11 и проходит напрямую на исполнительные механизмы сопел ИМС 12, вызывая их резкое срабатывание.
Однако у системы есть еще одно назначение: для вертикальной посадки по типу «хвостом вниз» летчик на подлете к посадочному устройству делает «горку», а точнее - «кобру» и в вертикальном положении по авиагоризонту переключает переключатель К 4 в положение «1». В этом положении система стабилизации управления тангажом переходит на следящее управление от пропорционального регулятора П 6. Что значит «следящее управление»? Это значит, что при отклонении ручки управления самолетом на какую-то величину самолет не начинает нарастающе увеличивать или уменьшать тангаж, как это было бы на обычном самолете, а принимает в близком к вертикальному положении какой-то наклон в тангажном направлении, который автоматически стабилизируется, не зависит от порывов ветра и других внешних воздействий, а зависит только от наклона ручки управления. Например, отклонили ручку вперед на 10 градусов - самолет наклонился на 1 градус вперед, отклонили на 20 градусов - самолет отклонился на 2 градуса и т.п. Еще лучше сделать эту зависимость нелинейной, например отклонили ручку на 10 градусов - самолет отклонился на 0.5 градуса, отклонили на 20 градусов - самолет отклонился на 2 градуса, отклонили на 30 градусов - самолет отклонился на 4 градуса и т.п. Это позволит летчику производить очень тонкое управление вблизи вертикального положения. Осуществить такую нелинейность можно либо подбором соответствующих выходных характеристик задатчика, либо характеристики усилителя, либо регулятора 6, либо установкой в любом месте между ними нелинейного электронного преобразователя (например, вольтамперные характеристики всех диодов и транзисторов вблизи нуля нелинейны, то есть основой такого преобразователя могут быть, например, высоковольтный селеновый выпрямитель или несколько последовательно соединенных диодов или транзисторов, на которые подается начальное смещение напряжения от резисторного моста).
Особо следует отметить систему управления направлением - тем же переключателем К 4 вблизи вертикального положения летчик может переключить ее с датчиков направления, которые вблизи вертикали работают неадекватно, на датчик крена (см. ниже). В этом случае один горизонтальный гироскоп хорошо обеспечивает управление наклоном самолета вправо-влево от вертикали, то есть как бы управление педалями по направлению, причем также следящее - то есть при отклонении педалей самолет чуть наклоняется влево или вправо от вертикального положения и сохраняет это положение независимо от внешних воздействий.
Отклоняясь таким образом на доли градуса от вертикали, самолет может аккуратно сдвигаться по горизонтали влево-вправо и вперед-назад, подруливая к посадочному устройству.
Для управления системой стабилизации управления или двумя такими системами (по направлению и тангажу) теоретически достаточно двух гироскопов в ортогональных плоскостях. Но система получится проще и надежнее, если применить три гироскопа, см. фиг.7.
Данный блок гироскопических датчиков состоит из трех взаимно перпендикулярных гироскопов: горизонтального 14, продольного 15 и поперечного 16 (соответственно трем основным плоскостям самолета), выход датчика тангажа 17 горизонтального гироскопа подается на вход усилителя тангажа 18, а выход с этого усилителя подается в сумматор системы управления тангажом (см. пункт 8), выход с датчика крена 19 этого же гироскопа подается на один из контактов переключателя К 4, датчики направления 20 и 21 продольного и поперечного гироскопов соединены со входами своих усилителей направления 22 и 23, а выходы этих усилителей соединены со входом сумматора направления 24, сигнал с которого поступает на упомянутый переключатель К 4, причем датчики вертикали 25 и 26 продольного и поперечного гироскопов соединены со входом сумматора вертикали 27, сигнал с которого подается на управляющие входы «больше» упомянутых усилителей направления, а с общего контакта «о» переключателя К 4 сигнал поступает в сумматор системы управления направлением (см. пункт 8), и, кроме того, выход с датчика крена 19 горизонтального гироскопа подается на управляющий вход «больше» усилителя тангажа 18 и/или выход сумматора вертикали 27 подается на вход усилителя тангажа 18 (показаны пунктиром), см. фиг 7.
Работает этот блок по линии тангажа так: сигнал об отклонении по тангажу с датчика тангажа 17 горизонтального гироскопа 14 поступает на свой усилитель 18. При отсутствии крена усиление минимально (допустим, равно единице). При появлении крена сигнал тангажа будет уменьшаться, примерно как косинус угла крена. Для компенсации этого ослабления на вход «больше» усилителя 18 подается сигнал с датчика крена 19, и коэффициент усиления усилителя увеличивается, желательно, чтобы характеристика «вход-выход» усилителя была подобрана так, чтобы сигнал тангажа не зависел от крена, то есть обратно пропорциональная косинусу крена. Теоретически такая система не работоспособна при крене ровно 90 градусов. Однако это не имеет практического значения, так как такой режим всегда активно управляется летчиком и не нуждается в стабилизации. А во-вторых, при малейшем отклонении от абсолютных 90 градусов система опять вступает в работу.
Но для верности, если этого потребуют испытания, можно поступить по другому: можно подать на вход усилителя тангажа суммарный сигнал с сумматора вертикали 27, так как конструктивная вертикаль при крене 90 градусов становится тангажом. Можно применить оба этих варианта компенсации крена одновременно.
Сигнал об отклонении направления также зависит от крена и еще зависит от тангажа, то есть зависит от любого отклонения от вертикали. Поэтому сигналы двух усилителей направления 22 и 23 могут усиливаться при отклонении от вертикали с помощью управляющего сигнала с сумматора вертикали 27.
Поскольку при некоторых пространственных положениях один из двух гироскопов 15 и 16 становится нечувствителен либо к направлению, либо к вертикали (когда плоскость гироскопа совпадает с одной из этих конструктивных плоскостей), то используется два датчика вертикали, сигналы которых суммируются и поэтому усредняются, и два датчика направления, усиленные сигналы которых также складываются и поэтому усредняются. Для компенсации ослабления сигнала направления используется также коррекция коэффициента усиления усилителей по сигналу отклонения от вертикали. Желательны линейные характеристики датчиков. И наконец, усиленный сигнал с сумматора направления 24 подается в систему на фиг.2 для осуществления стабилизации-управления.
А в режиме вертикального висения сигналом направления становится сигнал крена с датчика 19. Это осуществляется контактной группой упомянутого ранее переключателя К 4.
Возможен другой вариант блока гироскопических датчиков, в котором сигналы датчиков направления сначала суммируются, а затем усиливаются одним общим усилителем направления. Правда, чтобы не нарушать унификацию усилителей, сигнал с сумматора должен ослабляться делителем или резистором вдвое. Этот вариант соответствует п.13 «Формулы изобретения», графически он не иллюстрируется.
Для управления креном в режиме висения применен способ управления самолетом с двумя и более двигателями с отклоняемым вектором тяги, состоящий в том, что для управления по крену векторы тяги двух или более двигателей отклоняются так, что результирующая сила, действующая на центр масс, равна нулю.
Для этого самолет имеет соответствующую систему, которая состоит из задатчика крена, сигнал с которого поступает на сумматоры, на которые также поступает общий сигнал от системы управления вектором тяги, а сигналы с этих сумматоров усиливаются усилителями, со входов которых поступают на исполнительные механизмы сопел.
Система получится гораздо проще, надежней и безошибочней, если в ней будет участвовать только четное число двигателей. В данном случае - два.
По достижении достаточно большой скорости система становится не нужна и может отключаться по сигналу датчика скорости, который с помощью реле отключает питание или сигнал датчика.
На фиг.1 показан возможный вариант самолета, в качестве базового для которого могут быть МИГ-29 или СУ-27, вид сзади. Хорошо видны третий двигатель под фюзеляжем.
На фиг.2, 5, 6, 8 показаны четыре варианта системы дифференциальной топливоподачи, где: 1 - насос, 01 - основной топливный насос, 2 - трехходовой кран, 10 - исполнительный механизм, 29 - тиристорные блоки управления двигателями, 30 -управляемые жиклеры со своими исполнительными механизмами ИМ 1 и ИМ 2, 31 - датчик давления Р. Знаки «+» и «-» на фиг.6 показывают, что один и тот же сигнал ускоряет вращение одного двигателя и замедляет вращение другого.
На фиг.2, кроме того, показана система стабилизации-управления (рассмотрена ранее).
На фиг.3, 4 показан возможный вариант трехходового крана - распределителя потоков, где: 32 - цилиндрическая полость, в которой на оси закреплена пластина 33. Через расширяющийся патрубок 34 подается топливо, которое разделяется пластиной и прорезью 35 на два боковых патрубка 36, 37.
На фиг.7 показан блок гироскопов (рассмотрен ранее).
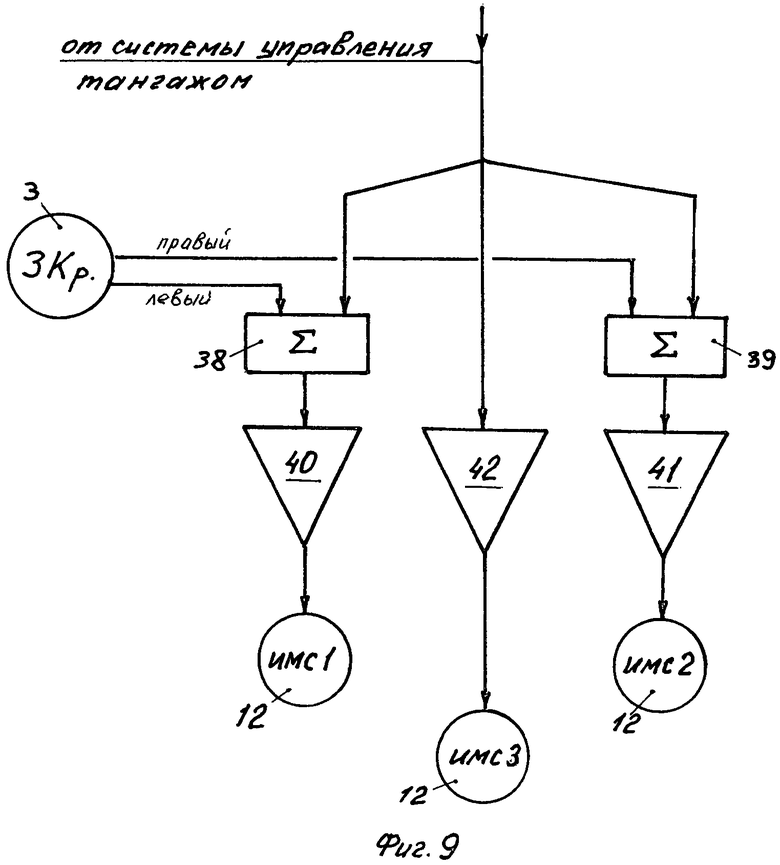
На фиг.9 показана система управления креном. Она состоит из задатчика крена ЗКР 3, соединенного с двумя сумматорами 38, 39, на которые также подается управляющий сигнал от системы управления тангажом. Сигналы с сумматоров поступают на усилители левого и правого двигателей 40, 41 и далее - к исполнительным механизмам сопел 12. На нижний двигатель сигнал от системы управления тангажом поступает без дополнительного сигнала через усилитель 42.
Работают системы дифференциальной топливоподачи так:
- на фиг.2, 3, 4 - исполнительный механизм ИМ 10 поворачивает пластину 33 и топливо в заданном соотношении распределяется по патрубкам 36, 37;
- на фиг.5 - исполнительный механизм ИМ 10 одной и той же тягой сдвигает управляющие рычаги управляемых топливных насосов 1, причем так, что, закрывая один насос, он открывает другой;
- на фиг 6 - сигнал от системы стабилизации-управления подается на тиристорные регуляторы 29 электродвигателей 28, причем так, что один двигатель ускоряется, а другой замедляется. Соответственно меняется производительность насосов 1;
- на фиг.8 сигнал от системы стабилизации управления поступает на управляемые жиклеры 30, причем так, что один жиклер открывается, а другой закрывается. Соответственно, увеличивается или уменьшается подача топлива в основные топливные магистрали этих двигателей.
Система на фиг.9 работает так: задатчик крена ЗКР 3 выдает два сигнала - «левый» и «правый». Они подаются на сумматоры 38, 39 левого и правого двигателей, где смешиваются сигналы тангажа, и далее поступают на сопла. В зависимости от знака сигнала («вверх» или «вниз») сопла отклоняются по-разному и создают кренящий момент.
Изобретение предназначено для модернизации самолетов МИГ-29 и СУ-27 и сделает их самолетами пятого поколения. Ожидаемые характеристики: сверхзвуковая крейсерская скорость, скорость на режиме атмофорсажа - 4 М, потолок - 25000 метров, скороподъемность - сверхзвуковая, допустимая перегрузка - 20 g (с новым противоперегрузочным костюмом и усиленным лонжероном).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ САМОЛЕТОМ | 2013 |
|
RU2551584C1 |
| ПРОТИВОСАМОЛЕТНАЯ РАКЕТА | 2009 |
|
RU2439476C2 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЁТОМ С ДВУМЯ И БОЛЕЕ ДВИГАТЕЛЯМИ-2 | 2014 |
|
RU2553614C1 |
| АВИАГОРИЗОНТ | 2010 |
|
RU2428657C1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2012 |
|
RU2531706C2 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| СИСТЕМА СПАСЕНИЯ САМОЛЕТА /ВАРИАНТЫ/ | 2006 |
|
RU2336203C2 |
| САМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) | 2011 |
|
RU2490169C2 |
| КОСМОЛЕТ СТАРОВЕРОВА (ВАРИАНТЫ) И АЛГОРИТМ ЕГО РАБОТЫ | 2012 |
|
RU2503592C1 |







Способ управления самолетом с двумя и более двигателями заключается в дифференциальной подаче топлива в двигатели. Подача осуществляется наряду с основными топливными насосами двигателей еще и от дополнительной топливной системы, приводимой в действие от приводной рессоры одного из основных двигателей или от электродвигателя и управляемой от гироскопической системы стабилизации-управления электрического или пневматического типа. Устройство для осуществления способа состоит из системы дифференциальной подачи топлива, системы стабилизации-управления по направлению и/или тангажу и блока гироскопических датчиков. Группа изобретений направлена на управление по крену в режиме висения. 2 н. и 11 з.п. ф-лы, 9 ил.
1. Способ управления самолетом с двумя и более двигателями, заключающийся в дифференциальной подаче топлива в двигатели и отличающийся тем, что эта подача осуществляется наряду с основными топливными насосами двигателей еще и от дополнительной топливной системы (систем), приводимой в действие от приводной рессоры одного из основных двигателей или от электродвигателя и управляемой от гироскопической системы стабилизации-управления электрического или пневматического типа.
2. Устройство для осуществления способа по п.1, состоящее из системы (систем) дифференциальной подачи топлива, системы (систем) стабилизации-управления по направлению и/или тангажу и блока гироскопических датчиков.
3. Устройство по п.2, в котором система дифференциальной подачи топлива для регулирования по одному параметру (направлению или тангажу) состоит из насоса и управляемого трехходового крана (распределителя потоков).
4. Устройство по п.2, в котором система дифференциальной подачи топлива для регулирования по обоим параметрам (направлению или тангажу) состоит из одного насоса и двух управляемых трехходовых кранов или трех или более управляемых клапанов.
5. Устройство по п.2, в котором система дифференциальной подачи топлива для регулирования по одному параметру (направлению или тангажу) состоит из двух насосов регулируемой производительности.
6. Устройство по п.2, в котором система дифференциальной подачи топлива для регулирования по одному параметру (направлению или тангажу) состоит из двух насосов с электродвигателями с регуляторами мощности.
7. Устройство по п.2, в котором система дифференциальной подачи топлива для регулирования по одному параметру (направлению или тангажу) состоит из двух или более основных топливных насосов, шунтированных управляемыми жиклерами, причем после насоса имеется датчик давления, соединенный с управляющим входом «меньше» усилителя системы стабилизации-управления.
8. Устройство по п.2, в котором система стабилизации управления по одному параметру состоит из задатчика управления (3), соединенного через переключатель (К 4) со входом пропорционально-интегрального регулятора (5) или со входом пропорционального регулятора (6), после чего выходы обоих регуляторов через тот же переключатель (К 4) соединены со входом сумматора (7), с другим входом которого соединен также гироскопический датчик (8), а выход сумматора соединен со входом усилителя (9), выход которого, в свою очередь, соединен с исполнительным механизмом системы дифференциальной топливоподачи (10) и с блоком симметричного диодного тиристора (11), с выхода которого сигнал разного назначения поступает на исполнительные механизмы сопел управляемого вектора (13), и на эти же входы этих механизмов поступает сигнал разного назначения (туда и обратно) с концевых выключателей датчика (13) положения исполнительного механизма системы дифференциальной топливоподачи, причем в зависимости от типа исполнительного механизма он через датчик своего положения имеет отрицательную обратную связь с входом усилителя (9).
9. Устройство по п.8, в котором в электрическом варианте автоматики интегрирующим звеном регулятора является гироскоп такого же типа, как и гироскопический датчик, но его ротор неподвижен, и управляется сервоприводом от сигнала задатчика управления.
10. Устройство по п.8, в котором в электрическом варианте автоматики блоком симметричного диодного тиристора является симметричный диодный тиристор или схема из двух параллельных встречных цепей из последовательно соединенных диода и тиристора, к управляющим электродам которых соединены соответственно две цепи из последовательно соединенных динистора и резистора.
11. Устройство по п.8, в котором в пневматическом варианте автоматики блоком симметричного диодного тиристора являются два перепускных клапана в двух линиях разного назначения.
12. Устройство по п.8, в котором блок гироскопических датчиков состоит из трех взаимно перпендикулярных гироскопов: горизонтального (14), продольного (15) и поперечного (16), выход датчика тангажа (17) горизонтального гироскопа подается на вход усилителя тангажа (18), а выход с этого усилителя подается в сумматор системы управления тангажом, выход с датчика крена (19) этого же гироскопа подается на один из контактов переключателя (К 4), датчики направления (20, 21) продольного и поперечного гироскопов соединены со входами своих усилителей направления (22, 23), а выходы этих усилителей соединены со входом сумматора направления (24), сигнал с которого поступает на упомянутый переключатель (К 4), причем датчики вертикали (25, 26) продольного и поперечного гироскопов соединены со входом сумматора вертикали (27), сигнал с которого подается на управляющие входы «больше» упомянутых усилителей направления, а с общего контакта «о» переключателя (К 4) сигнал поступает в сумматор системы управления направлением, и, кроме того, выход с датчика крена (19) горизонтального гироскопа подается на управляющий вход «больше» усилителя тангажа (18) и/или выход сумматора вертикали (27) подается на вход усилителя тангажа (18) (показаны пунктиром).
13. Устройство по п.8, в котором блок гироскопических датчиков состоит из трех взаимно перпендикулярных гироскопов: горизонтального (14), продольного (15) и поперечного (16), выход датчика тангажа (17) горизонтального гироскопа подается на вход усилителя тангажа 18, а выход с этого усилителя подается в сумматор системы управления тангажом, выход с датчика крена (19) этого же гироскопа подается на один из контактов переключателя (К 4), датчики направления (20, 21) продольного и поперечного гироскопов соединены со входами сумматора направления (24), а выход этого сумматора соединен со входом усилителя направления (22), сигнал с которого поступает на упомянутый переключатель (К 4), причем датчики вертикали (25, 26) продольного и поперечного гироскопов соединены со входом сумматора вертикали (27), сигнал с которого подается на управляющие входы «больше» упомянутых усилителей направления, а с общего контакта «о» переключателя (К 4) сигнал поступает в сумматор системы управления направлением, и, кроме того, выход с датчика крена (19) горизонтального гироскопа подается на управляющий вход «больше» усилителя тангажа (18) и/или выход сумматора вертикали (27) подается на вход усилителя тангажа (18).
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| САМОЛЕТ С ИЗМЕНЯЕМЫМ НАПРАВЛЕНИЕМ ВЕКТОРА ТЯГИ | 2008 |
|
RU2371352C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ АТАКИ САМОЛЕТА ЗА СЧЕТ ИЗМЕНЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ | 1979 |
|
SU818116A1 |
| РЕЗЕРВНАЯ СИСТЕМА ДЛЯ ИНДИКАЦИИ КУРСА И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ НА САМОЛЕТЕ | 2000 |
|
RU2236697C2 |
| US 5740988 A1, 21.04.1998 | |||
| Техническая информация ЦАГИ, № 8, 1987, с.11-13. | |||

