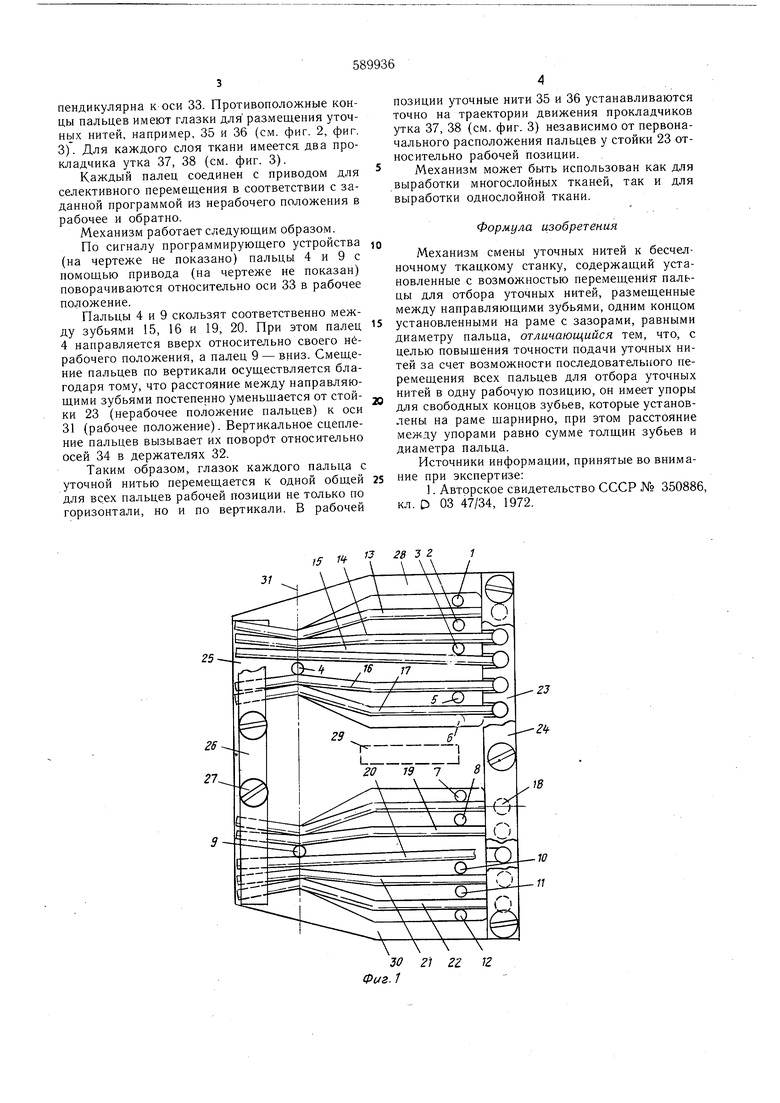
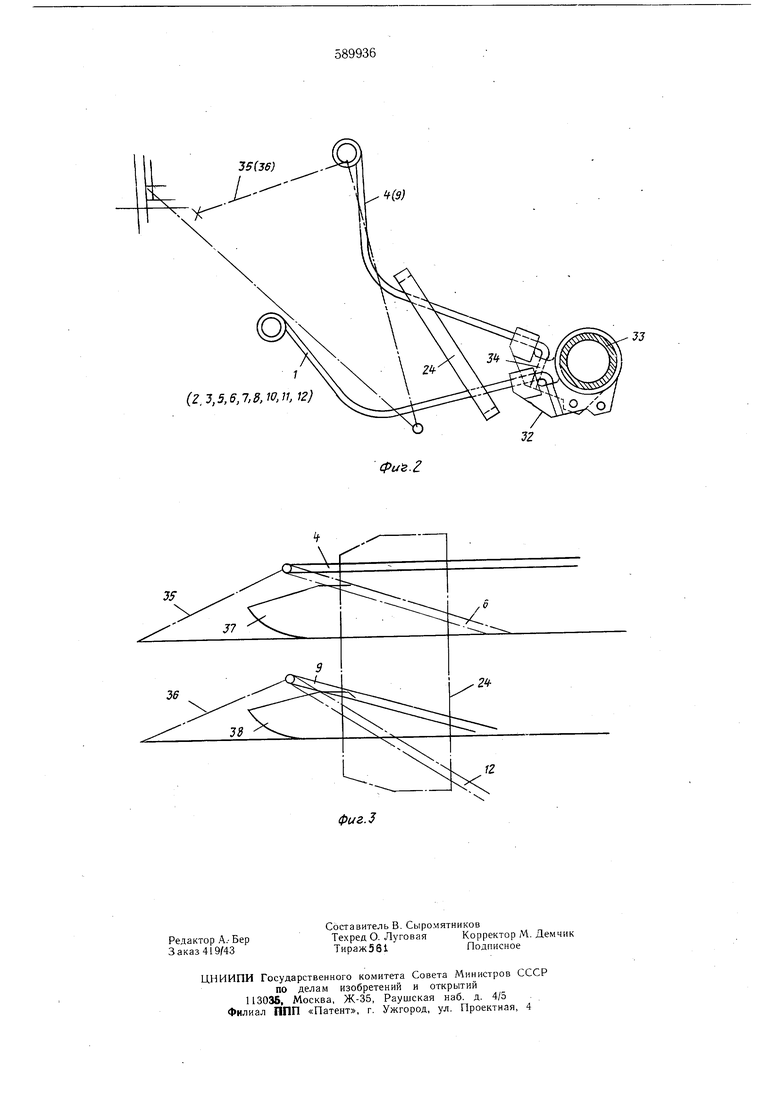
Изобретение относится к области текстильного машиностроения и может быть использовано в ткацких станках для производства многоцветных однослойных или многослойных тканей. Известен механизм смены уточных нитей к бесчелночному ткацкому станку, содержащий установленные с возможностью перемещения пальцы для отбора уточных нитей, размещенные между направляющими зубьями, одним концом установленными на раме с зазорами, равными диаметру пальца 1. Недостатком этого механизма является низкая точность подачи уточных нитей в одну рабочую позицию из-за жесткого крепления на раме направляющих зубьев, препятствующих перемещению концов всех пальцев с уточными нитями в одну общую рабочую позицию на траектории движения прокладчика утка. Целью изобретения является повыщение точности подачи уточных нитей путем последовательного перемещения всех пальцев для отбора уточных нитей в одну рабочую позицию. Для этого предложенный механизм имеет упоры для свободных концов зубьев, которые установлены на раме щарнирно, при этом расстояние между упорами равно сумме толщин зубьев и диаметра пальца. На фиг. 1 изображены направляющие зубья, вид спереди; на фиг. 2 -то же, вид сверху; на фиг. 3 - то же, вид сбоку. Механизм для каждого слоя ткани содержит две группы пальцев 1-6 и 7-12 и две группы направляющих зубьев 13-17 и 18-22. Один конец каждого направляющего зуба зажреплен щарнирно в стойке 23 рамки 24. Нротивоположные концы зубьев подвижно закреплены в стойке 25 рамы 24 с помощью пластины 26 и винтов 27. Расстояния между верхним упором 28 и средним упором 29 и нижним упором 30 рамы 24 у стойки 23 равно соответственно сумме толщин одной группы зубьев и одной группы пальцев. Вдоль оси 31 эти расстояния соответственно равны сумме толщин одной группы зубьев и одного диаметра пальца. Средние направляющие зубья 15, 20 в каждой группе имеют прямолинейную форму, а остальные зубья изогнуты. Конструкция упоров 28, 29 и 30 соответствует форме сменных зубьев 13, 17, 18, 22. Пальцы для отбора уточных нитей закреплены щарнирно своими изогнутыми концами в держатепях 32, которые свободно насажены один над другим на вертикальную ось 33. Ось поворота 34 каждого пальца в держателе 32 перпендикулярна к оси 33. Противоположные концы пальцев имеют глазки для размещения уточных нитей, например, 35 и 36 (см. фиг. 2, фиг. 3). Для каждого слоя ткани имеется два прокладчика утка 37, 38 (см. фиг. 3). Каждый палец соединен с приводом для селективного перемещения в соответствии с заданной программой из нерабочего положения в рабочее и обратно. Механизм работает следующим образом. По сигналу программирующего устройства (на чертеже не показано) пальцы 4 и 9 с помощью привода (на чертеже не показан) поворачиваются относительно оси 33 в рабочее положение. Пальцы 4 и 9 скользят соответственно между зубьями 15, 16 и 19, 20. При этом палец 4 направляется вверх относительно своего нерабочего положения, а палец 9 - вциз. Смещение пальцев по вертикали осуществляется благодаря тому, что расстояние между направляющими зубьями постепенно уменьщается от стойки 23 (нерабочее положение пальцев) к оси 31 (рабочее положение). Вертикальное сцепление пальцев вызывает их поворбт относительно осей 34 в держателях 32. Таким образом, глазок каждого пальца с уточной нитью перемещается к одной общей для всех пальцев рабочей позиции не только по горизонтали, но и по вертикали. В рабочей
/5
1У 28 3 г1
/
30 21 гг 12
Фиг. 1 ПОЗИЦИИ уточные нити 35 и 36 устанавливаются точно на траектории движения прокладчиков утка 37, 38 (см. фиг. 3) независимо от первоначального расположения пальцев у стойки 23 относительно рабочей позиции. Механизм может быть использован как для выработки многослойных тканей, так и для выработки однослойной ткани. Формула изобретения Механизм смены уточных нитей к бесчелночному ткацкому станку, содержащий установленные с возможностью перемещения пальцы для отбора уточных нитей, размещенные между направляющими зубьями, одним концом установленными на раме с зазорами, равными диаметру пальца, отличающийся тем, что, с целью повышения точности подачи уточных нитей за счет возможности последовательного перемещения всех пальцев для отбора уточных нитей в одну рабочую позицию, он имеет упоры для свободных концов зубьев, которые установлены на раме щарнирно, при этом расстояние между упорами равно сумме толщин зубьев и диаметра пальца. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР № 350886, кл. D 03 47/34, 1972.
(Z,7,5,6,7,8,W,n, 12)
Фиё.г