Изобретение относится к закладочным машинам для закладки выработанного пространства крутых и пологих пластов породой, получаемой при подрыве нижнего штрека или породного забоя, и работаюшим по принципу лопаты, т. е. прерывистого бросания с применением выталкивателя, получаюш,его возвратно-поступательное движение в направляюндих, с возможностью изменения угла выброса породы.
Предлагаемая машина снабжена дозатором, получаюш.им от выталкивателя посредством рычага возвратнопоступательное движение и воздействующим через соответствуюший рычаг на заслонку, через которую подается порода в машину. Этим достигается поступление породы в определенных порциях в ствол только тогда, когда выталкиватель находится ниже дозатора. Вследствие этого порода занимает определенной толщины слой на вогнутой поверхности выталкивателя.
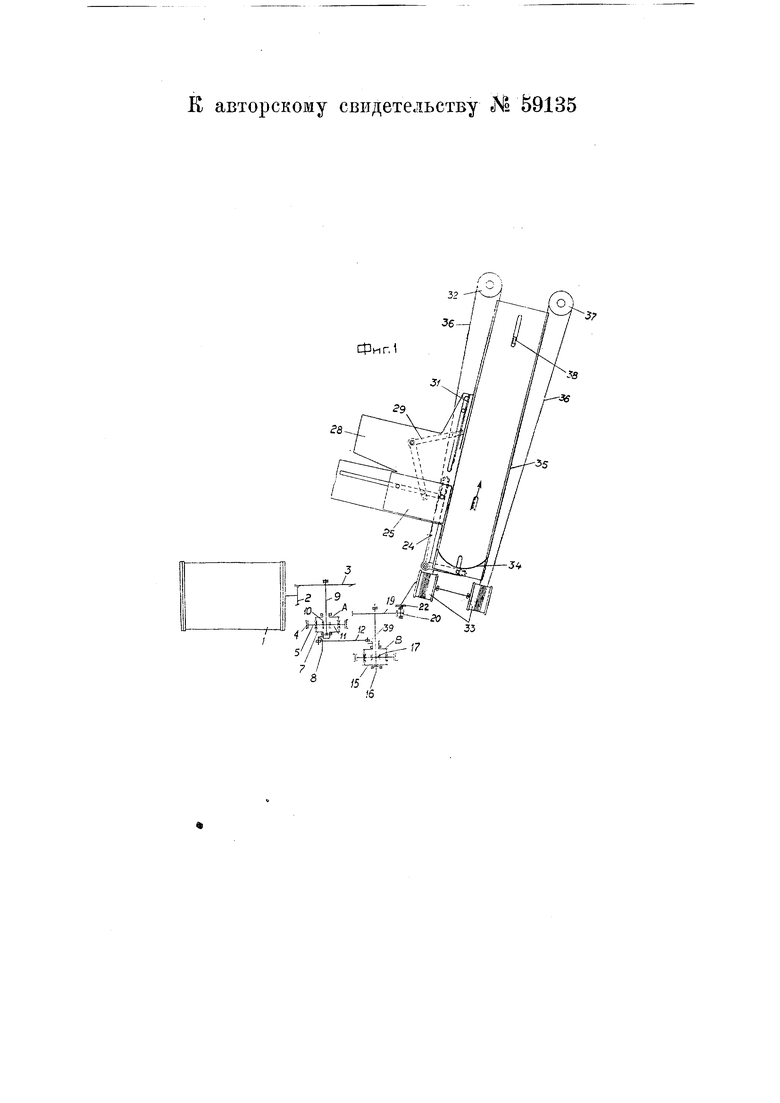
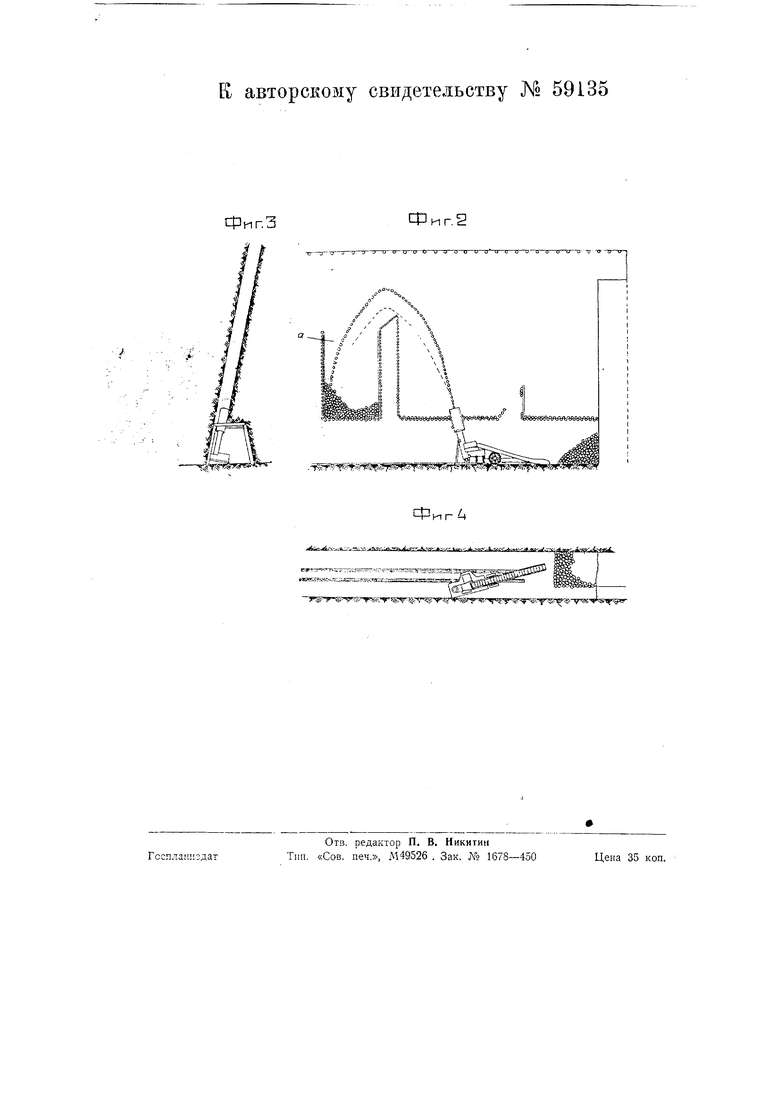
На чертеже фиг. 1 изображает кинематическую схему закладочной машины; фиг. 2 - продольный вертикальный разрез штрека с установленной в нем закладочной машиной;
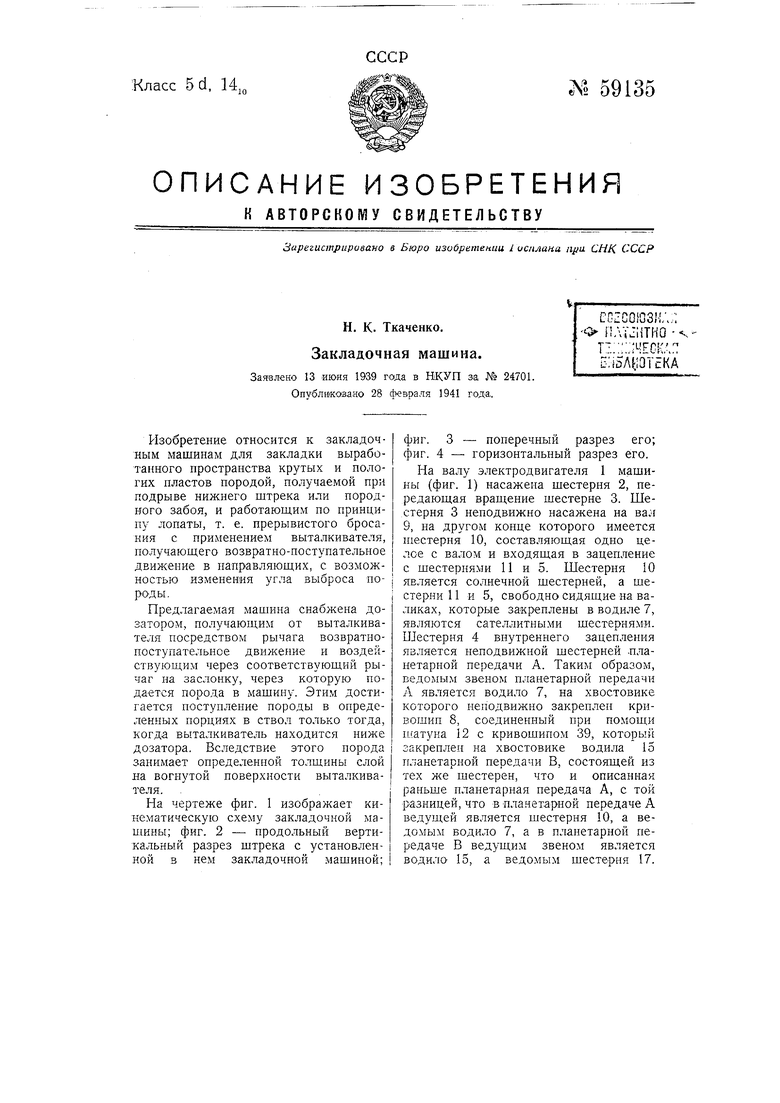
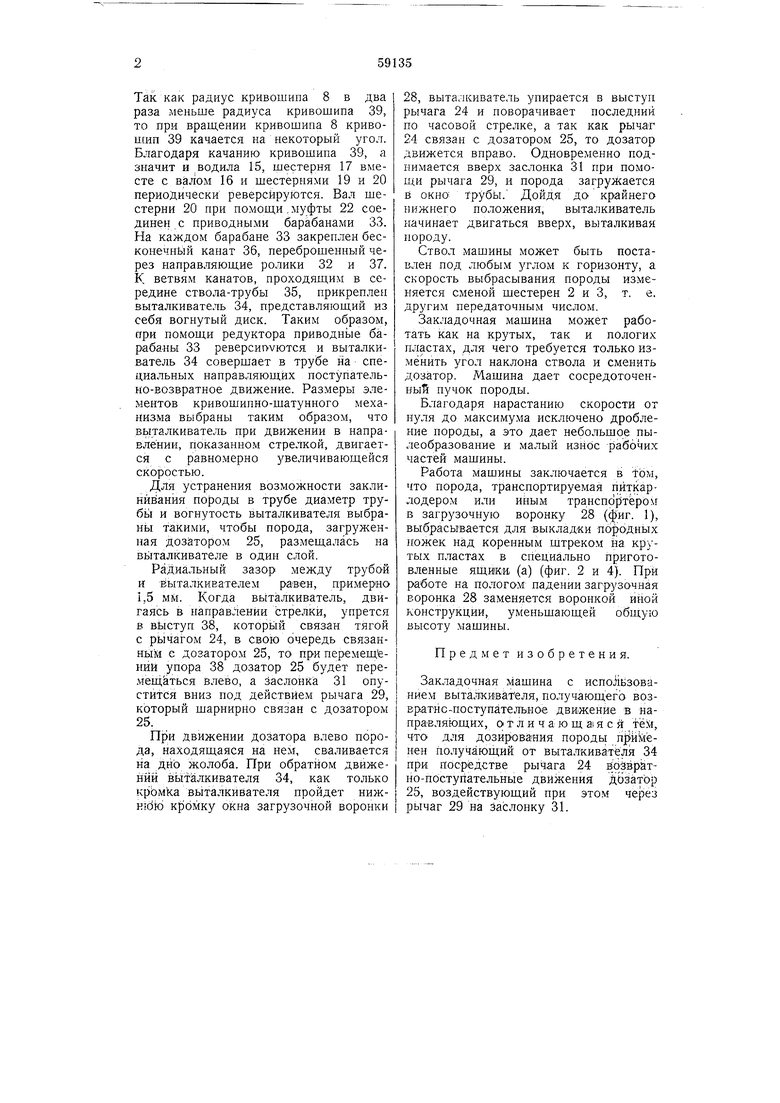
фиг. 3 - поперечный разрез его; фиг. 4 - горизонтальный разрез его.
На валу электродвигателя 1 машины (фиг. 1) насажена шестерня 2, передаюшая вращение шестерне 3. Шестерня 3 неподвижно насажена на вал 9, на другом конце которого имеется шестерня 10, составляющая одно целое с валом и входящая в зацепление с шестернями 11 и 5. Шестерня 10 является солнечной шестерней, а шестерни 11 и 5, свободно сидящие на валиках, которые закреплены в водиле 7, являются сателлитными шестернями. Шестерня 4 внутреннего зацепления является неподвижной шестерней .планетарной передачи А. Таким образом, ведомым звеном планетарной передачи А является водило 7, на хвостовике которого неподвижно закреплеп кривошип 8, соединенный при помоши шатуна 12 с кривошипом 39, который закреплен на хвостовике водила 15 планетарной передачи В, состоящей из тех же шестерен, что и описанная раньше планетарная передача А, с той разницей, что в планетарной передаче А ведущей является щестерня 10, а ведомым водило 7, а в планетарной передаче В ведущим звеном является водило 15, а ведомым шестерня 17.
Так как радиус кривошипа 8 в два раза меньше радиуса кривошипа 39, то при враш;ении кривошипа 8 кривошип 39 качается на некоторый угол. Благодаря качанию кривошипа 39, а значит и водила 15, шестерня 17 вместе с валом 16 и шестернями 19 и 20 периодически реверсируются. Вал шестерни 20 при номощи, муфты 22 соединен с приводными барабанами 33. На каждом барабане 33 закреплен бесконечный канат 36, переброшенный через направляюш;ие ролики 32 и 37. К ветвям канатов, нроходяш,им в середине ствола-трубы 35, прикреплен выталкиватель 34, представляюший из себя вогнутый диск. Таким образом, при помоши редуктора приводные барабаны 33 реверсируются и выталкиватель 34 совершает в трубе на специальных направляюш,их поступательно-возвратное движение. Размеры элементов кривошипно-шатунного механизма выбраны таким образом, что вь1талкиватель при движении в направлении, показанном стрелкой, двигается с равномерно увеличивающейся скоростью.
Для устранения возможности заклинивания породы в трубе диаметр трубЬ1 и вогнутость выталкивателя выбраны такими, чтобы порода, загруженная дозатором 25, размеш алась на вь1талкивателе в один слой.
Радиальный зазор между трубой и выталкивателем равен, нримерно 1,5 мм. Когда вь1талкиватель, двигаясь в направлении стрелки, упрется в вЬютуп 38, которь ш связан тягой с рычагом 24, в свою очередь связанный с дозатором 25, то при неремеш;ений упора 38 дозатор 25 будет перемещйться влево, а заслонКа 31 опустится вниз под действием рычага 29, который шарнирно связан с дозатором 25.
движении дозатора влево порода, находяш,аяся на нем, сваливается на дно жолоба. При обратном движений выталкивателя 34, как только КрЬмка выталкивателя пройдет нижHidto кромку окна загрузочной воронки
28, выталкиватель упирается в выстун рычага 24 и поворачивает последний по часовой стрелке, а так как рычаг 24 связан с дозатором 25, то дозатор движется вправо. Одновременно поднимается вверх заслонка 31 при помош:и рычага 29, и порода загружается в ОКНО трубы. Дойдя до крайнего нижнего положения, выталкиватель начинает двигаться вверх, выталкивая породу.
Ствол машины может быть поставлен под любым углом к горизонту, а скорость выбрасывания породы изменяется сменой шестерен 2 и 3, т. е. другим передаточным числом.
Закладочная машина может работать как на крутых, так и пологих пластах, для чего требуется только изменить угол наклона ствола и сменить дозатор. Машина дает сосредоточенный нучок породы.
Благодаря нарастанию скорости от нуля до максимума исключено дробление породы, а это дает небольшое пылеобразование и малый износ рабочих частей машины.
Работа машины заключается в tOM, что порода, транспортируемая пйткарлодером или иным транспортёром в загрузочную воронку 28 (иг. 1), выбрасывается для выкладки породных ножек над коренным штреком на крутых пластах в специально приготовленные яш,икн (а) (фиг. 2 и 4). При работе на пологом падении загрузочная воронка 28 заменяется воронкой иной конструкции, уменьшающей обш,ую высоту машины.
Предмет изобретения.
Закладочная машина с использованием выталкивателя, получающего возвратно-поступательное движение в нанраеляЬщИх, 01тличающа1яся , что для дозирования породы применен получающий от выталкивателя 34 при посредстве рычага 24 ВОЗвратно-нбступательные движения АОЗатор 25, воздействующий нри этом через рычаг 29 на заслонку 31.
га
32
фиг. 1
Фиг.З
Фиг. 2
jLjajJt a
. ,
..11У- .l.-,v,.f.VK,.-.«ta,-,,4-t;- - -«.n,.T.
T - r f: y--r ;f 4 r f rf : y-
Фиг4
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ возведения монолитных зданий | 1948 |
|
SU83173A1 |
| СПОСОБ БЕЗЛЮДНОЙ ВЫЕМКИ МОЩНОГО, БОЛЕЕ 30 М, ПОЛОГОГО ПЛАСТА УГЛЯ | 2005 |
|
RU2299984C1 |
| Выемочное оборудование для подземной горной разработки, в частности, калийных солей | 1989 |
|
SU1834974A3 |
| СПОСОБ ОХРАНЫ ПЛАСТОВЫХ ГОРНЫХ ВЫРАБОТОК | 1997 |
|
RU2172837C2 |
| СПОСОБ ВОЗВЕДЕНИЯ ЗАКЛАДОЧНОГО МАССИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013564C1 |
| Скрепероструговая установка | 1988 |
|
SU1553672A1 |
| Способ управления горным давлением при разработке пологих пластов угля | 1982 |
|
SU1081358A1 |
| СПОСОБ ВЫЕМКИ ГРАФИТА ИЗ ТОНКОЙ ПЛАСТООБРАЗНОЙ ЗАЛЕЖИ КРУТОГО ПАДЕНИЯ | 1992 |
|
RU2077673C1 |
| КОМБИНИРОВАННЫЙ СПОСОБ РАЗРАБОТКИ СВИТЫ УГОЛЬНЫХ ПЛАСТОВ | 1992 |
|
RU2039257C1 |
| Способ проветривания вентиляционного участка | 1990 |
|
SU1795114A1 |