Изобретение относится к подвескам транспортных средств и, в частности к активным подвескам.
Известна активная подвеска корпуса транспортного средства, содержащая гидравлический упругий элемент и регулятор, связанный с упругим элементом трубопроводами 1.
Однако эта подвеска имеет низкую надежность.
Известна также активная подвеска корпуса транспортного средства, содержащая упругий элемент, связывающий колесо транспортного средства с eio корпусом, насос, исполнительный гидроцилиндр с компенсационной камерой, дросселирующей системой и распределитель, имеющий рабочий орган 2.
Однако эксплуатация этой подвески сопряжена со значительным расходом мощности на привод исполнительного гидроцилиндра.
Цель изобретения - снижение расхода мош,ности на привод исполнительного гидроцилиндра.
Для этого подвеска снабжена связанным с упомянутым рабочим органом датчиком для измерения упругой силы и задания нагрузки на колесо, а исполнительный гидроцилиндр установлен параллельно упругому SvTeMeHTy, при этом датчик имеет эталонный контур, состоящий из последовательно соединенных задающего элемента и усилителя-сумматора, и вход ную цепь, содержащую последовательно соединенные чувствительный элемент и усилитель первой ступени, сравнивающий элемент, к которому подключены выходы обеих цепей и усилителя второй ступени, последовательно соединенного со сравнивающим э,1ементом, подключенным к электромагнитам, управляющим рабочим органом распределителя.
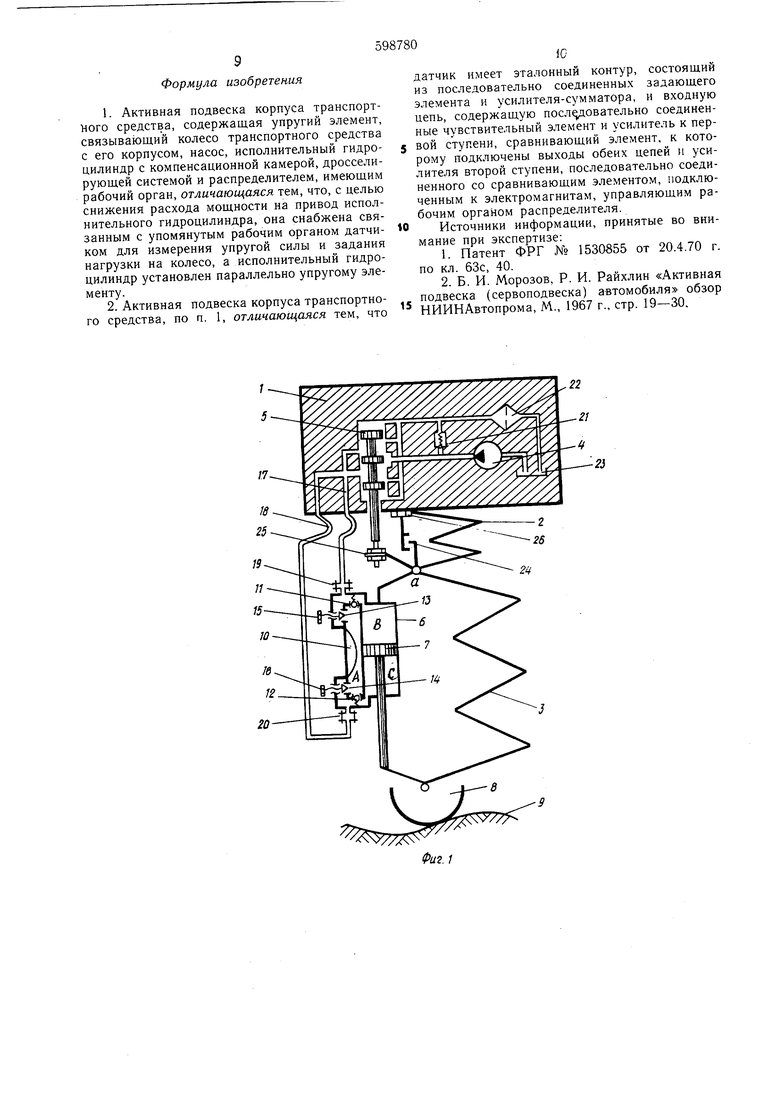
На фиг. 1 изопражена кинематическая и
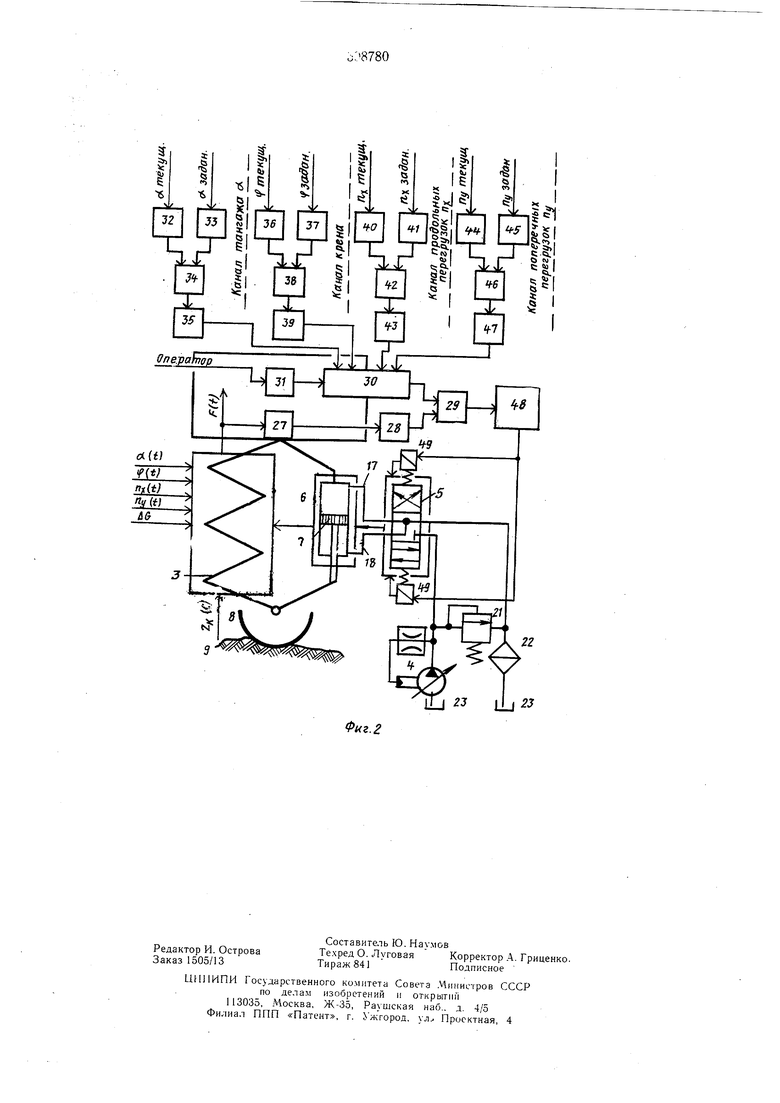
гидравлическая схе.ма активной иодвескн корпуса транспортного средства; на фиг. 2 - струк турная схема управ,тения активной подвеской. Корпус 1 транспортного средства опирается в статическом положении на упругий элемент подвески, состоящий из двух пос,тедовательно расположенных частей: вспомогательного упругого элемента 2 и основного упругого элемента 3. Вспомогательный упругий элемент 2 в данном устройстве играет чувствительного
и задающего элемента, элемента сравнения и усилителя, управляющего работой гидравлического распределителя, к которому подводится жидкость от насоса 4. Золотник 5 распределителя крепится к нижнему опорному концу вспомогательного упругого элемента 2 в точке «а,
а гильза распределителя - к корпусу 1. Распределитель управляет работой гидроцилиндра, состоящего из корпуса б и поршня 7. Звенья гидроцилиндра связаны с противоположными опорными концами основного упругого элемента 3. Корпус 6 цилиндра крепится к верхнему опорному концу амортизатора в точке «а, а поршень гидроцилиндра через шток связан с осью колеса 8, опирающегося на дорогу 9. За одно целое с гидроцилиндром выполняется, либо просто крепится к нему, компенсационная камера А с пневматическим компенсатором 10, компенсационными клапанами И, 12 и дросселирующими отверстиями 13 и 14. При работе подвески в активном режиме- т. е. в режиме стабилизации, сил, действующих на корпус 1 через элементы подвески, дросселирующие отверстия 13 и 14 плотно закрыты пробками 15 и 16. Подвод жидкости в надпоошневую полость В и в штоковую полость с корпуса 6 Осуществляется оТ распределителя по трубопровода.м 7 и 18 через разъемные соединения 19 и 20, минуя компенсационные клапаны 11 и 12. Трубопроводы 17 и 18 имеют гибкие эластичные участки-, позволяющие им изменять свою геометрикэ в пределах деформации вспомогательного упругого элемента 2. Для разгрузки гидравлических магистралейот чрезмерного повышения давления за насосом 4 установлен предохранительный клапан 21, соединяющий напорную магистраль со сливом. Для очистки жидкости в сливной магистрали установлен фильтр 22, а для хранения запаса жидкости и слива ее избытков из магистралей используется емкость -23. При выполнении гидропривода по замкнутой схеме емкость 23 будет играть роль дополнительной, компенсирующей утечку жидкости через уплотнения.
Деформация вспомогательного упругого элемента 2 ограничивается упорами 24 в пределах, обеспечивающих необходимое перемещение золотника 5. Золотник 5 к нижнему концу вспомогательного упругого элемента 2 (точка «а) крепится с помощью разъемного соединения 25, которое позволяет регулировать нейтральное положение золотника в зависимости от прогиба упругого элемента 2 и изменения веса корпуса 1. С помощью аналогичного соединения 26 можно регулировать и взаи.мное расположение упоров 24 .
Регулируемым объектом данной системы автоматического регулирования (CAB) является упругий эле.мент 3 (см. фиг. 2).
Этот упругий элемент реагирует на дорож ные возмуи-,ения Zn(t), изменение веса тран спорт)юго средства ДО, изменение угла тангажа (t(t), угла крена 4-(t), продольные перегрузки nx(i) и поперечные перегрузки nY(t). Все перечисленные функции и величины являются сходными. Выходной регулируемой величиной регулируе.мого объекта является сила F(i), действующая на корпус 1 и воспринимаемая чувстг5ительпым элементом 27, установленным последовательно упругому элементу 3 и корпусу 6 гидроцилиндра. Чувствительный элемент 27 последовательно соединенс усилителем первой ступени 28, подключенны.м к сравниваюн ему элементу 29, образующе.му совмест но с чувствительным элементом усилителем
входную цепь. Со сравнивакзщим элементом 29 последовательно соединен эталонный контур, состоящий из усилителя-сумматора 30 и задающего эле.мента. Последний выполнен,в виде: блока 31, задающего изменение статической нагрузки; блока (канала тангажа), задающего изменение нагрузки на колесо в, зависимости от угла тангажа корпуса; блока (канала крена), задающего изменение нагрузки на колесо в зависимости от угла крена; блока (канала
продольных перегрузок), задающего изменение нагрузки на колесо в зависимости от продольных перегрузок, испытываемых корпусом; блока (канала поперечных перегрузок), задающего изменение нагрузки на колесо в зависимости от поперечных перегрузок.
Учитывая, что изменение веса транспортного средства С (нагрузка или разгрузка) осуществляется, как правило, на стоянке, используется задающий блок 31 с ручным управ-лением.
Блок, измеряющий угол тангажа, состоит из реагирующего элемента 32, воспринимающего токущее значение угла тангажа, и задатчика 33, подключенных через элемент сравнения 34 к датчику тангажа 35, соединенному с усилителем-су.мматором 30 (см. фиг. 1).
Блок, задающий изменение нагрузки на колесо в зависимости от угла крена, имеет реагирующийэлемент 36 и задатчик 37, подключенные через элемент сравнения 38 к датчику угла крена 39, связанному с усилителе.м-сумматором 30.
0 Блок, задающий изменение нагрузки на колесо в зависимости от продольных перегрузок, испытываемых корпусом транспортного средства, состоит из реагирующего элемента 40 и задатчика 41, подключенных к элементу сравнения 42, соединенному с датчиком 43 продольных нагрузок, связанным с усилителем-сумматором 30.
Блок, задающий изменение нагрузки на колесо в зависимости от поперечных перегрузок, имеет реагирующий элемент 44 и задатчик 45,
подключенные через элемент сравнения 46 к датчику 47, связанному с усилителем-сумматором 30.
Сравнивающий элемент 29 последовательно подключен через усилитель второй ступени 48 к электромагнитам 49, управляющим золот5 НИКОМ 5 распределителя.
На корпус I (см. фиг. 1) при движении по ровной дороге не будут действовать возмущения. Со стороны дороги на него через последовательно расположенные упругие элементы 2
и 3 действует постоянная сила, уравновешивающая вес корпуса 1. Деформации основного упругого элемента 3 и вспомогательного упругого, элемента 2 равны статическим. Следовательно, золотник 5 находится в нейтральном положении Насос 4 забирает жидкость из емкости 23 и
5 через щели золотникового распределителя по сливному каналу через фильтр 22 направляет ее на слив. Полость компенсационной камеры изолирована от полостей С и В, так как пробки 15 и 16 ввернуты до упора и плотно закрыЕгают дросселирующие отверстия 13 и 14, а ком° пенсационные клапаны прижаты своими пружинами к седлам. Давление на выходе из насоса, определяемое нагрузкой на поршень 7 гид роцилиндра приблизительно равно нулю, следовательно, и гидравлическая мощность, потребшемая насосом и определяемая произведением расхода на давление, тоже равна нулю. Таким образом, гидравлический привод активной подвески при движении по ровной дороге не потребляет энергии, если не считать потерь, связанных с работой насоса 4 на холостом ходу. Прм наезде колеса на выступающую неровность дороги сила, действующая на корпус через последовательно расположенные основной упругий элемент 3 и вспомогательный элемент
2увеличивается: и тот и другой начинают деформироваться (сжиматься).
Деформация (сжатие) вспомогательного упругого элемента 2 приведет к тому, что расстояние между корпусом 1 и нижним опорным концом вспомогательного упругого элемента 2 (точка «а) уменьшится, поэтому золотник 5, закрепленный на этой точке, переместится вверх относительно гилЬзы распределителя, связанной с корпусом 1. При этом средний и нижний буртики золотника 5 разобщают полость С гидроцилиндра со сливом и соединяют ее с напорной магистралью насоса. Полость Б будет по-прежнему соединена со сливом. Жидкость под давлением поступает в полость С и перемещает порщень в цилиндре. Упругий элемент
3при этом сжимается, но уже не под действием сил инерции корпуса 1, а под действием усилия, развиваемого гидроцилиндром. Таким образом, в точке «а к вспомогательному упругому элементу от цилиндра прикладывается сила, имеющая противоположное направление по сравнению с силой, определяемой деформацией основного упругого элемента 3. Как только равнодействующая сила от упругого элемента 3 и гидроцилиндра, приложенная к точке «Q, станет равной статической силе (весу корпуса 1), росстановится деформация вспомогательного упругого э.темента 2 до своего статического значения, что вызовет установку золотника 5 в нейтральное положение относительно гильзы. Полость С соединяется со сливом и движение порщня 7 в корпусе 6 прекращается. При дальнейшем наезде на выступающую неровность вновь начнет увеличиваться сила, действующая на корпус 1, сожмется вспомогательный упругий элемент 2, и все повторится. Таким образом, при наезде на выступающую неровность, когда скорость перемещения порщня V в цилиндре, определяемая расходом насоса Q,больше возможной скорости изменения высоты неровности Z, распределитель будет автоматически то включать в работу гидроцилиндр, то выключать его. При этом корпус .1 будет испытывать очень незначительные импульсы сил, определяемые деформацией вспомогательного упругого элемента 2, благодаря чему корпус 1 практически не будет изменять своего положения по вертикали, а колесо 8 относительно корпуса 1 будет совершать движение, определяемое изменением высоты неровностей дороги, т. е. описывать эти неровности. При наезде колеса на яму сила, действующая на корпус 1 от упругих элементов.
уменьшается, следовательно уменьщается и деформация вспомогательного упругого элемента 2, который начинает разжиматься. При этом расстояние корпусом 1 и нижним опорным концом вспомогательного упругого элемента 2 (точка «а) увеличится, поэтому золотник 5, закрепленный в точке «о, сместится вниз относительно гильзы распределителя, связанной с корпусом 1. При этом средний и верхний буртики золотника 5 разобщают полость
. В гидроцилиндра со сливом и соединяют ее с напорной магистралью насоса. Полость С соединяется при этом со сливной магистралью. Жидкость под давлением поступает в полостп В и перемещает порщень 7 в корпусе 6 вниз. Упругий элемент 3 при этом растягивается.
Таки.м образом, в точке «а от цилиндра npiiкладывается сила, компенсирующая уменьшение статической. Как только равнодействующ.ая сила от упругого элемента 3 и гидроцилиндра, приложенная в точке «о, станет равной статической силе, восстановится деформация вспомогательного упругого элемента 2 до своего статического значения, что вызовет установку золотника 5 в нейтральное положение. Полость В соединится со сливом, движение порщня 7 и растял ение упругого элемента 3
прекратится. По аналогии с наездом на выступающую неровность, когда скорость перемещения поршня в цилиндре, определяемая раcxoдojvI насоса Q, больше возможной скорости изменения высоты неровности ,распределитель будет автоматически то включать гид0 роцилиндр в работу, то выключать его. При этом на корпус 1 будут воздействовать незначительные импульсы сил, определяемые отклонением деформации вспомогательного упругого элемента от ее значения в положении статического равновесия. Поэтому корпус 1 практически не будет изменять своего положения по вертикали, а колесо 8 относительно корпуса 1 будет совершать движение, определяемое изменением высоты неровности дороги, т. е. двигаться вниз, описывая профиль ямы. - В случае выхода из строя элементов автоматики (насоса, распределителя, трубопроВодов и т. д.) транспортное средство не потеряет подвижность, так как данная подвеска может работать и в пассивном режиме. Для этого с помощью разъемных соединений 19 и 20
5 отсоединяют от гидроцилиндра подводящие трубопроводы 17 н 18. Открытые отверстия гидроцилиндра после отсоединения трубопроводов 17 и 18 и сами трубопроводы закрывают заглушками или пробками. С помощью пробок 15 и 16 открывают дросселирующие отверстия 13
и 14. Таким образом, силовой гидроцилиндр превращается в обычный гидравлический амортизатор (демпфер), гасящий колебания корпуса- 1, на основном упругом элементе 3. Вспомогательный упругий элемент 2 можно блоки,j,j ровать упорами 24. При движении поршня 7 в корпусе 6 вверх (ход сжатия) объем полости В уменьшается и жидкость через отверстия 13 будет поступать в компенсационную камеру. Из последней жидкость через отверстие 14 и компенсационный клапан 12 будет поступать в полость С, объем которой увеличивается. Дроссе,1ирова, жидкости на ходе сжатия через отверстие 1. сопровождается потерями энергии колебаний корпуса 1 на упругом элементе 3 поэтому амплптуда неремен ений и ускорений корпуса I даже при равенстЕ5е частоты вынужлаюшей силы и соГ ственноп частоты системы будет иметь конечное значение. При ходе отдачн, когда идет (выдвигается из цилиндра) объем полости С уменьшается н жидкость из нее через калиброванное отверстие перетекает в компенсацпонную камеру. В полость S, объем которой увеличиваетя. жидкость попадает из компенсационной камеры через отверстие 13 и компенсационный клапан 11. Коэффициент сопротивления гидравлического демпфера (гидроцилиндра, работаюп 1его в режиме демпфера) зависеть от нлощади дросселирующих отво|)стий 13 и 14. Таким образом, при работе подвески в пассивном режиме основной упругий элемент выполняет функции, свойственные рессоре подвески, а силовой гидроцилиндр работает как демггфирующий эле.мент подвески. При изменении веса на величину ДО (см. фнг. 2 сигнал с чувствительного элемента 27, пройдя усилитель .8, поступит на сравнивающий элемент 29. /:.ля того чтобы исключить влияние изменения веса ДО на нормальную работу активной подвески, оператор (водитель) вручную регулирует сигнал задающего блока 31 до такой величины, чтобы он, пройдя хсилитель сумматор 3(1 и попадя на сравнивающий элемент 29, обеспечил равенство нулю выходного сигнала этого элемента. Иными словами, задающий блок 31 и усилитель-сумматор 30 подают на сравнивающий эле.мент 29 сигнал, равный по абсолютной величине и противоположный по знаку сигналу, постунающе.му с чувствительного элемента 27 через усилитель 28. При движении по дорожным неровностям сигнал с задающего блока 31 останется постоянным (так как в движении const), а сигнал с чувствительного элемента 27 будет меняться в соответствии с отклонением деформации упругого элемента 3 от статического значения. Сигнал, пропорциональный этому отклонению, будет с выхода сравнивающего элемента 29 поступать на усилите, ь 48, который в зависимости от полярности сигнала подает команду электромагнитам 49 на переключение гидравлического распределителя в позицию определяющую подвод жидкости в требуемую полость гидроцилиндра. Таким образом, задающий блок 31 обеспечивает нормальную работу активной подвески при любых из.чи-нения.х веса подрессоренных масс. В отличие от AG изменение угла а тангажа подрессоренного корпуса и связанное с ним перераспределение нагрузки на колесо происходит в движении. Чувствительный элемент 27 при этом автоматически будет реагировать на подобные изменения и выдавать сигнал через усилитель 28 на сравнивающий элемент 29, что можут вызвать необоснованное опускание или подъем корпуса. Поэтому для компенсацпн этого паразитного сигнала вводится устройство задающее изменение нагрузки на колесо в зависимости от изменения vma тангажа. Сигнал. пропорциональный нз.менению угла тангажа, поступает на вход усилителя-сумматора 30, где осуществляется функциональное преобразование сигнала, пропорционального углу тангажа, в сигнал, пропорциональный из.менению нагрузки на данное колесо при изменении угла тангажа в соответствии с зависимостью определенной аналитически или экспериментально. Кроме того, в усилителе-сумматоре сигнал, пропорциональный изменению нагрузки на колесо , усиливается и коррект 1руется в зависи.мости от статической нагрузки GQ+ АС по сигналу с задающего блока 3J. С сумматора 30 сигнал, равный по величине и обратный по знаку сигналу, поступающему с чувствительного элемента, нодается на сравнивающее устройство 42. Таким образом, в сравнивающем элементе 29 уничтожается та часть сигнала с чувствительного элемента 27, которая соответствует изменению силы, действующей на корпус 1 в зависимости от изменения угла тангажа. Соверщенно аналогично работает блок, задающий нагрузку на колесо в функции угла крепа. Сигнал, иропорциональный углу крена с датчика 39 подается на усилитель-сумматор 30, где преобразуется в сигнал, пропорциональный изменению нагрузки на данное колесо при изменении угла крена f усиливается, корректируется в зависи.мости от статической нагрузки и направляется в сравнивающий элемент 29. Сигнал с датчика 39 через усилитель-сумматор 30 подается к сравнивающему элементу 29 противоположным по знаку и равным по абсолютной величине той части сигнала с чувствительного э.темента 27, которая соответствует из.менению нагрузки на данное колесо при изменении угла крена. Блок, задающий изменение нагрузки на колесо в функции продольных перегрузок п (t), работает следующим образом. Сигнал с датчика 43, пропорциональный продольной перегрузке подается на усилитель-сумматор 30, где преобразуется в сигнал, пропорциональный изменению нагрузки на колесо в функции продольных перегрузок. Сигнал с датчика 43 через усилитель-сумматор 30 к сравнивающему элементу 29 подается противоположным но знаку и равным по абсолютной величине той части сигнала с чувствительного элемента 27, которая соответствует изменению нагрузки на колесо при появлении продольных перегрузок. Таким образом, обеспечивается работа активной подвески при разгоне и торможении. Блок, задающий изменение нагрузки на ко.leco в функции поперечных перегрузок, работает следующим образо.м. Сигнал с датчика 47, пропорциональный поперечной перегрузке, подается на усилитель-сумматор 30, где преобразуется в сигнал, пропорциональный изменению нагрузки на колесо в зависимости от ноперечной перегрузки. Этот сигнал подается противоположным по знаку и равным по абсолютной величине той части сигнала с чувствительного элемента 27, которая соответствует изменению нагрузки на колесо при появлении поперечных перегрузок. Так обеспечивается 1юрмальная работа активной подвескн при повороте транспортного средства.
Формула изобретения
1. Активная подвеска корпуса транспортного средства, содержащая упругий элемент, связывающий колесо транспортного средства с его корпусом, насос, исполнительный гидроцилиндр с компенсационной камерой, дросселирующей системой и распределителем, имеющим рабочий орган, отличающаяся тем, что, с целью снижения расхода мощности на привод исполнительного гидроцилиндра, она снабжена связанным с упомянутым рабочим органом датчиком для измерения упругой силы и задания нагрузки на колесо, а исполнительный гидроцилиндр установлен параллельно упругому элементу.
2. Активная подвеска корпуса транспортного средства, по п. 1, отличающаяся тем, что
датчик имеет эталонный контур, состоящий из последовательно соединенных задающего элемента и усилителя-сумматора, и входную цепь, содержащую посл овательно соединенные чувствительный элемент и усилитель к первой ступени, сравнивающий элемент, к которому подключены выходы обеих цепей и усилителя второй ступени, последовательно соединенного со сравнивающим элементом, подключенным к электромагнитам, управляющим рабочим органом распределителя.
Источники информации, принятые во внимание при экспертизе:
1.Патент ФРГ № 1530855 от 20.4.70 г. по кл. 63с, 40.
2.Б. И. Морозов, Р. И. Райхлин «Активная подвеска (сервоподвеска) автомобиля обзор НИИНАвтопрома, М., 1967 г., стр. 19-30.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU568561A1 |
| Подвеска корпуса транспортного средства | 1977 |
|
SU753683A1 |
| Активная пневмогидравлическая подвеска транспортного средства | 1980 |
|
SU901087A1 |
| АКТИВНАЯ ПОДВЕСКА КОРПУСА ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2203812C2 |
| Активная пневмогидравлическая подвеска транспортного средства | 1985 |
|
SU1243964A1 |
| Активная подвеска транспортного средства | 1986 |
|
SU1361030A1 |
| Активная подвеска корпуса транспортного средства | 1978 |
|
SU783060A1 |
| Активная подвеска транспортногоСРЕдСТВА | 1979 |
|
SU793823A1 |
| Подвеска транспортного средства | 1980 |
|
SU1031803A1 |
| Система автоматического регулирования характеристики подвески транспортного средства | 1980 |
|
SU998147A1 |
23
2J
