54J ПОДВЕСКА КОРПУСА ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Активная подвеска транспортного средства | 1986 |
|
SU1361030A1 |
| Активная подвеска корпуса транспортного средства | 1973 |
|
SU598780A1 |
| Активная подвеска транспортногоСРЕдСТВА | 1979 |
|
SU793823A1 |
| Активная пневмогидравлическая подвеска транспортного средства | 1985 |
|
SU1243964A1 |
| Активная подвеска корпуса транспортного средства | 1978 |
|
SU783060A1 |
| Активная пневмогидравлическая подвеска транспортного средства | 1980 |
|
SU901087A1 |
| Гидропривод грузоподъемного механизма лесного манипулятора | 2022 |
|
RU2789167C1 |
| Система регулирования характеристики подвески транспортного средства | 1990 |
|
SU1773743A1 |
| Установка для исследования пневмогидравлической рессоры | 1973 |
|
SU556368A1 |
| Поворотный зажимной патрон | 1990 |
|
SU1710212A1 |
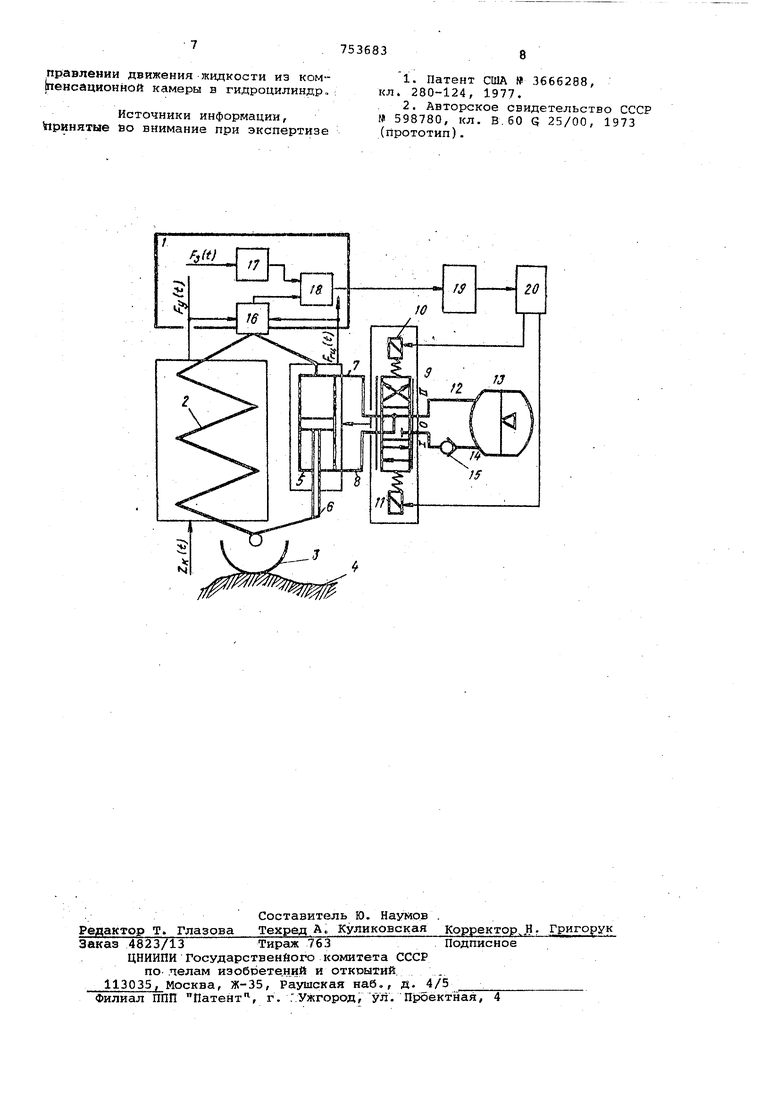
изобретение относится к подвескам транспортных средств. : Известна подвеска корпуса транспортного средства, содержащая упругий элемент, гидравлический цилиндр с дросселями прямого и обратного хода и компенсационную камеру Щ. Недостатком этой подвески является значительное усиление толчков и ударов, передаваемых на корпус в зарезонансных режимах движения, и возможность динамического отрыва колеса от грунта на ходе отдачи. Известна также подвеска транспортнего средства, содержащая упругий элемент, исполнительный гидроцилиндр имеющий шток с поршнем, компенсацион ную камеру с подводящим трубопроводо эл ектрогидравлический распределитель измерительно-преобразовательное устройство, связанное через усилитель с электромагнитами распределителя 2. Недостатком этой подвески является сложность конструкции и низкая надежность. Цель изобретения - упрощение конст рукции и повышение надежности йодвески. Для достижения цели поршневая и штоковая полости гидроцилиндра сообщены через распределитель подводящим трубопроводом с компенсационной кг.мерой, соединенной с распределителем гидроцилиндра отводящим трубопроводом, в котором смонтирован обратный клапан, открывающийся в направлении движения жидкости из компенсационной камеры в гидроцилиндр. На чертеже представлена принципиальная схема подвески корпуса транспортного средства. Подрессоренный корпус 1 опирается на упругий элемент 2 подвески, свяванный с осью колеса 3, катящегося по дороге 4. Параллельно упругому элементу 2 установлен исполнительный гидроцилиндр 5 с поршнем и штоком 6. Поршневая полость гидроцилиндра с помощью трубопровода 7, а штоковая полость с помощью трубопровода В через распределитель 9, имеющий электро-i магниты управления 10 и 11,сообщаютс;я подводящим трубопроводом 12 с компенсационной камерой 13, которая отводящим гидропроводом 14 соединяется с гидравлическим распредели- телем 9, В отводящем трубопроводе 14 смонтирован обратный клапан 15, открывающийся в направлении движения жидкости из компенсационной камеры 13 в гидроцилиндр 5. Распределитель 9 может выполнять ся с релейным или непрерывным управ лением, однако он должен иметь три характерных позиции 1, О, 11. Компенсационная камера 13 пред(етавляет собой открытую или закрыту емкость с рабочей жидкостью, в последнем случае часть ее должна быть заполнена газом с давлением, близким к атмосферному и объемом ра ным 3-4 объемам штока 6. Гидроцилиндр 5, распределитель 9 и компенсационная камера 13 с подводящими и отводящими гидропровода1 1и могут представлять собой конструктивно единый узел, аналогичный п форме и размерам телескопическому Гидравлическому амортизатору. Последовательно гидроцилиндру 5 и упругому элементу 2 установлен чу ствительный элемент 16 первичный измерительны преобразователь) , который измеряет текущее значение сил FIT (t) , действующей на корпус 1 со стороны упругого элемента 2 и гидро цилиндра 5, Чувствительный элемент 16 может выполняться в виде акселерометра. Задающее устройство 17 формирует сигнал, пропорциональный заданной нагрузке на колесо FO, (t)/независящей от микропрофиля дороги, т.е. на грузки определяемой статическим весом подрессоренных частей корпуса и его изменением при нагрузке-разгруз ке, перераспределением нагрузки на колеса при разгоне и торможении,; движении на подъем (под уклон), дви жении на повороте и косогоре. В установившемся режиме движения по горизонтальному макропрофилю дороги задающее устройство .17 формирует си нал, пропорциональный весу корпуса приходящемуся на данное колесо. В сравнивающем устройстве 18 из сигнала с чувтсвительного элемента 16, пропорционального суммарной силе, действующей на корпус, вычитает ся сигнал с задающего устройства 17 пропорциональный нагрузке на колесо которая не зависит 6т микропрофиля дорогиi С выхода сравнивающего устройства 18 снимается,таким образом, сигнал рассогласования, пропорциональный лишь динамической составляю щей нагрузки, определяемой изменением микропрофиля дороги. Итак, чувствительный элемент 16, задающее устройство 17 и сравнивающее устройство 18 образуют измерительно-преобразовательное устройств текущего, значени т. динамической соетавляющей силы, возникающей от дорожкьгк неровностей. Выход сравнивающего устройства 18 соединен с входом усилителя 19, откуда усиленный сигнал поступает в избирательное устройство 20. В зависимости от полярности сигнала избирательное устройство 20 подает напряжение на один из электромагнитов j.0, ul. При положительном сигнале расрогласования, соответствующем увеличению силы, действующей на корпус по сравнению с заданным значением, напряжение подводится к электромагниту 10, который устанавливает распределитель 9 в позицию 1. При отрицательном сигнале, соответствующем уменьшению силы, действующей на корпус по сравнению с заданным значением, напряжение подается на электромагнит 11,. который устанавливает распределитель 9 в позицию II. Упругий элемент 2 является звеном системы автоматического регулирования, на вход которого подается возмущение ), описывающее дорожные неровности, а выходной величиной является сила Fy(t), действующая на корпус 1 и одновременно на чувствительный элемент 13. В статическом положении и при движении по ровной дороге гидроцилиндр 5 не несет никакой нагрузки, так как обе его рабочие .полости с помощью распределителя 9, находящегося в нейтральной позиции О, соединены между собой и с компенсационной камерой 13, давление в которой практически равно атмосферному, при этом порь:ень в цилиндре находится в плавающем состоянии и его положение определяется статической деформацией упругого элемента 2. Вес корпуса 1 полностью воспринимается упругим элементом 2. При наезде на выступающую неровность упругий элемент 2 сжимается; сила, действующая через упругий элемент на корпус 1, увеличивается. С помощью чувствительного э.чемента 16, задающего 17 и сравнивающего 18 устройств вырабатывается CHrnaji, пропорциональный увеличению силы, действующей на корпус 1. Этот сигнал усиливается в усилителе 19 и поступает в избирательное устройство 20, которое при положительной полярности сигнала, соответствующего увеличению силы, подает напряжение на электромагнит 10, который устанавливает распределитель 9 в позицию I. Как в нейтральном положении распределителя О, так и в.позиции I, гидроцилиндр не препятствует сжатию упругого элемента. При этом жидкость из поршневой полости по трубопроводу 7, через распределитель 9 в позиции 1 и подводящий трубопровод 12 поступает в компенсационную камеру 13,из которой по отводящему трубопроводу 14 через обратный клапан 15 .распределитель 9 и трубопровод 8 перетекает в штоковую полость гидро- , цилиндра 5. При коротких-и достаточно широких трубопроводах сопротивление гидроцилиндра сжатию упругого элемента можно свести практически к (Нулю. Установка гидравлического распределителя 9 в позицию I фактически означает одностороннюю блокировку уп ругого элемента 2 гидроцилиндром 5, так как в этом положении распределителя гидроцилиндр не препятствует сж тию, но не позволяет восстановить первоначальную деформацию упругого элемента. Действительно для восстановления первоначальной статической) деформа ции упругого элемента 2 необходимо вытеснить х идкость из штоковой полос ти гидроцилиндра 5, что невозможно выполнить при нахоходении распределителя 9 в положении I, так как обратный клапан 15 в этом случае запирает проход из штоковой полости гидроцили дра 5 в компенсационную камеру 13. Таким образом гидроцилиндр воспринимает на себя избыток упругой силы, действующей на корпус 1 со стороны упругого элемента. При этом суммарное значение силы, действующей на корпус 1 и измеряемой чувствительным элементом 18 со стороны упругого эле мента 2 и гидроцилиндра 5 становится равным статическому или- заданному значению, что приведет к установке распределителя 9 снова в нейтральную позицию О, в которой жидкость из што ковой полости имеет возможность пере текать в поршневую. Но при этом гидр цилиндр перестает воспринимать избыток упругой силы, упругий элемент на чинает разжиматься, следовате хьно, суммарное значение силы, действующей на корпус становится больше заданного, поэтому распределитель 9 снова займет позицию 1 и клапан 15 воспрепятствует перетеканию х идкости из штоковой полости. При непрерывном уп равлении золотник распределителя займет некоторое промежуточное положение, обеспечивая необходимый перепад давления для частичной компенсации упругой восстанавливающей силы. Поэтому корпус 1 в положение статичес кого равновесия приходит с меньшей скоростью и, следовательно,, отклонит ся от положения статического равновесия в противоположную сторону-на меньшее расстояние. При наезде кблеса 3 на яму величина, динамической составляющей силы уменьшается. Отрицательный сигнал рассогласования, формируемый сравнивающим устройством 18, усиливается усилителем 19 и избирательное устройство 20 подает напряжение на элек ромагнит 11, который установит распределитель 9 в позицию II. Жидкость при этом из штоковой полости по трубопроводу 8 через распределитель 9 в позиции II, и по подводящему трубопроводу 12 поступает в компенсационную камеру 13. Поршневая полость |гидроцилиндра 5 заполняется жидкость о, поступающей из компенсационной камеры 13 по отводящему трубопроводу 14, через обратный кла-ан 15, гидравлический распределитель. 9 в позиции II и по трубопроводу 7. Таким образом, при наезде на яму упругий элемент беспрепятственно растягивается. Но установка гидравлического распределителя в позицию II не позволяет упругому элементу 2 сжиматься, т.е. восстановить первоначальную деформацию до тех пор, пока сила, действующая на корпус не примет заданное значение, так как вытеканию жидкости из поршневой полости гидроцилиндра 5 будет препятствовать обратный клапан 15. Таким образом гидроцилиндр частично компенсирует уменьшение упру- . гой силы, действующей на корпус и не позволяет ему провалиться вниз. .При непрерывном управлении распределителем 9, его золотник устанавливается в некотором промежуточном положении, обеспечивая заданный перепад, давления между поршневой и штоковой полостями, т.е. обеспечивает частичную компенсацию упругой восстанавливающей силы и медленное опускание корпуса к новому положению равновесия. Таким образом, в подвеске упругий элемент беспрепятственно деформируется в обе стороны от статического положения, однако при возврате в исходное положение создается усилие от гидроцилиндра частично компенсирующее восстанавливающую упругую силу, что предотвращает раскачивание корпуса. Формула изобретения Подвеска корпуса транспортного средства, содержащая упругий элемент, исполнительный гидроцилиндр, имеющий шток с поршнем, компенсационную камеру с подводящим трубопроводом, электрогидравлический распределитель , измерительно-преобразовательное устройство, связанное через усилитель с электромагнитами распределителя, отличающаяся тем, что, с целью упрощения конструкции и повышения ее надежности, поршневая и. штоковая полости гидроцилиндра сообщены через распределитель подв.одящим трубопроводом с компенсационной камерой, соединенной с распределителем гидроцилиндра отводящим трубопроводом, в котором смонтирован общтный клапан, открывающийся в направлении движения жидкости из ком-(пенсацнонной камеры в гидроцилиндр,.
Источники информации, 1ринитые во внимание при экспертизе
