Изобретение относится к области гидроакустики, а более конкретно к способам измерения глубин с последующей пространственной интерполяцией восстановления рельефа морского дна при дискретных измерениях глубин посредством гидроакустических средств, и может быть использовано при измерении параметров водной среды при решении прикладных задач, включая анализ ветровых полей, анализ радиологического и химического загрязнения, топографические исследования и т.д.
Известно устройство для распознавания морского грунта путем измерения параметров эхосигнала при зондировании дна прямоугольными импульсами [1]. В зависимости от типа грунта эхосигнал при нормальном падении на дно изменяет свою форму в широких пределах от теоретически неискаженного прямоугольного импульса на монолитах до существенно широкого импульса с весьма пологим фронтом и длительностью, в несколько раз превышающей длительность посылки на грунте, представляющим собой жидкую массу. В качестве информативного параметра используется крутизна фронта нарастания эхосигнала, которая измеряется и сравнивается с заранее проградуированной сеткой с нанесенными на нее границами жесткости для различных типов грунта. Так как практически невозможно перекрыть зондирующими сигналами всю исследуемую площадь, то для дальнейшего построения поверхности рельефа дна или получения рельефа некоторой двумерной скалярной геопространственной характеристики применяют методы линейной и нелинейной интерполяции (см., например, - Проблемы окружающей среды и природных ресурсов. М.: ВИНИТИ, 1999, №11, с.13). Помимо основного недостатка, заключающегося в низкой достоверности распознавания морского грунта, обусловленной тем, что крутизна нарастания эхосигнала определяется главным образом акустическими свойствами границы раздела вода/грунт, а не всей толщины грунта, то при наличии на поверхности жидкого грунта неровностей или каменистых отложений крутизна нарастания фронта эхосигнала определяется отражательными свойствами неровностей или отложений, что приводит к получению завышенных значений жесткости грунта, а в сочетании с последующим восстановлением поверхности рельефа по интерполяции измерений может привести к необоснованным решениям, и, следовательно, к существенным потерям в реализации конкретной задачи.
В известном техническом решении [2], представляющим собой эхолокатор для распознавания морских грунтов, благодаря тому, что определяется степень физического состояния грунта по величине удлинения эхоимпульса, исходя из зависимости удлинения эхосигнала от физико-механических характеристик грунта обеспечивается повышение точности определения параметров отражающей границы и достоверности результатов измерений по сравнению с техническим решением [1]. Однако восстановление рельефа по всей исследуемой поверхности сводится к применению формального метода интерполяции по измеренным величинам, что приводит к существенным потерям в реализации конкретной задачи.
Кроме того, в известных способах в качестве модели рельефа, как правило, принимается гладкая поверхность, вложенная в трехмерное объемлющее пространство. Исходная информация о рельефе представляет собой множество скалярных значений в изолированных пространственных точках. Для восстановления поверхности по измеренным точечным значениям применяют математические методы интерполяции и аппроксимации, которые применимы только для гладких функций, если известен аналитический вид исковой функции или если известен класс функций, к которому относится искомая функция. В случае геопространственных полей эти требования не выполнены, поэтому ошибка восстановления поверхности рельефа неизвестна.
В то же время в практических задачах чаще всего требуется не восстановление вида поверхности, а информация об изменчивости рельефа, например, при прокладке подводных коммуникаций, а также изменений рельефа под действием гидродинамических и литодинамических процессов, влияющих на безопасность эксплуатации подводных коммуникаций, в частности магистральных трубопроводов.
При обработке результатов измерений глубин посредством гидроакустических средств изменчивость поверхности количественно представляется в виде первых и даже вторых производных. Однако свойство гладкости у всех геопространственных полей (за исключением приливных колебаний уровня моря) отсутствует. Это видно не только в отсутствие свойств дифференцируемости, но и в особенностях численной обработки данных наблюдений. Действительно, даже задача отыскания производной одномерной гладкой функции (fx) по экспериментальным данным значительно отличается от задачи дифференцирования функции, для которой известны точные данные. Наблюдения не свободны от ошибок, а отношения (f(x+h)-f'(x))/h (где h - глубина) очень чувствительны даже к небольшим ошибкам, если h становится достаточно малым (в случае мелкого моря). Поэтому обычные формулы численного дифференцирования существенно искажают конечные результаты. Решение такой задачи требует введение дополнительных предположений, не следующих и не связанных с измеренной информацией, что вносит элемент субъективности. Не спасает положение и применение методов сглаживания. Применение методов двумерной фильтрации вносит существенные артефакты используемой вычислительной процедуры и вдобавок искажает местоположение структурных линий геопространственного поля.
Все это не позволяет эффективно использовать вычислительные возможности ЭВМ при обработке данных о геопространственных полях для прикладных задач, решаемых на основе восстановленного рельефа геопространственного поля.
В известном способе определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления [3], включающем излучение гидроакустического сигнала в сторону дна и прием отраженных сигналов в двух точках, расположенных по вертикали на заданном расстоянии, измерение времени задержки синфазных сигналов, угла бортовой качки носителя антенн и определение по полученным данным направлений прихода синфазных сигналов и искомых глубин акватории расчетным путем, в котором измеряют время задержки прихода отраженного гидроакустического сигнала по вертикали, определяют время задержки прихода тех же синфазных сигналов в случае их отражения от ровной поверхности дна по каждому расчетному направлению в соответствии с математическим выражением с определением сходимости вычисленных и измеренных значений времени задержки.
Определение сходимости вычисленных и измеренных значений позволяет уменьшить погрешность определения глубины акватории при проведении съемки рельефа дна акватории. Однако реализация данного способа требует выполнения предварительных вычислений для определения расчетных направлений, что обеспечивается при условии использования результатов ранее проводимых съемок на данной акватории. Так как с течением времени структура поверхности грунта не остается постоянной в силу изменчивости гидродинамических и геофизических факторов, то использование расчетных данных не всегда является корректным и может привести к существенным погрешностям получения конечных результатов при съемке рельефа дна. Кроме того, восстановление рельефа дна по всей исследуемой поверхности, как и в известных технических решениях [1, 2], сводится к применению формального метода интерполяции по измеренным дискретным величинам, что приводит к существенным потерям в реализации конкретных задач, в частности при формализации результатов измерений в картографическую продукцию. При решении данной задачи вводятся дополнительные предположения, не следующие и не связанные с измеренной информацией, что вносит элемент субъективности. Не спасает положение и применение методов сглаживания. Применение методов двумерной фильтрации вносит существенные артефакты используемой вычислительной процедуры и вдобавок искажает местоположение структурных линий геопространственного поля.
Это обусловлено тем, что при использовании известных способов решение задачи восстановления рельефа сводится к построению непрерывной двумерной функции, проходящей через измеренные дискретные значения глубины. При этом на первом этапе производится триангулирование точек измерения, т.е. на множестве точек измерения вводятся отношения "близости" точек, а на втором этапе строится собственно искомая функция, как композиция элементарных весовых функций (линейных или нелинейных). При такой обработке исходной информации свойства рельефа никак не учитываются и в процессе обработки возникают артефакты ложных гребней и ложбин в форме рельефа и, следовательно, именно на этом этапе нарушается морфологический способ восстановления рельефа.
При реализации известных способов применяют различные технические средства: многолучевые эхолоты [1, 2], гидролокатор бокового обзора [3], гидроакустический зонд [4].
При измерении глубин посредством эхолота выполняют следующую последовательность действий, включающих измерение глубины посредством эхолота, определение поправок эхолота путем прямых измерений, обусловленных углублением вибраторов, выбором места нуля эхолота, вычисление поправки за отклонение фактической вертикальной скорости распространения звука в воде от номинальной для данного эхолота путем косвенных измерений, заключающихся в измерении температуры воды и солености морской воды на стандартных горизонтах, вычисление исправленных значений глубин с последующей интерполяцией полученных результатов измерений (Инструкция по промеру ИП-64. Л., Управление гидрографической службы, 1964).
Недостатком при использовании эхолотов является появление погрешностей, обусловленных наличием боковых лепестков диаграммы направленности, что может привести при достаточно короткой посылке к появлению от одного того же слоя нескольких групп рассеянных сигналов, так как истинный сигнал проходит по основному максимуму, а по боковым лепесткам проходят ложные сигналы.
Известный гидролокатор бокового обзора для определения глубин акватории [3] содержит функционально соединенную первую и вторую антенны, одна из которых приемоизлучающая, передающий блок, первый и второй приемоизмерительные блоки, блок управления, блок определения времени задержки прихода отраженных от ровной поверхности дна синфазных сигналов по каждому расчетному направлению, вычислитель и регистратор, в котором выходы первой и второй антенн подключены соответственно к входам первого и второго приемоизмерительных блоков, выход передающего блока соединен с приемоизлучающей антенной, выходы первого и второго приемоизмерительных блоков подключены к входам вычислителя, выход последнего подключен к регистратору, а блок управления соединен с первым и вторым приемоизмерительными блоками, передающим блоком, вычислителем и регистратором, вход блока определения времени задержки прихода отраженных от ровной поверхности дна синфазных сигналов по каждому расчетному направлению, вход которого соединен с выходом блока управления, а выход подключен к входу вычислителя.
Существенным недостатком данного устройства является то, что для достижения технического результата, заявленного в способе, блок управления и вычислитель должны быть выполнены в виде ЭВМ типа СМ-4 ввиду большего количества расчетных и вычислительных операций, что ограничивает его применение только при использовании для промерных работ крупнотоннажных носителей (судов), снабженных мощной ЭВМ.
Акустический зонд для измерения скорости звука в море [4] содержит импульсно-циклический датчик скорости звука и последовательно соединенные усилитель мощности и гидроакустический излучатель, в котором с целью повышения помехоустойчивости он снабжен модулятором и блоком преобразования сигнала в двоичный код, подключенным первым входом к выходу импульсно-циклического датчика скорости звука, вторым входом к первому выходу задающего генератора и к управляющему входу модулятора, третьим, четвертым и пятым входами соответственно к второму, третьему и четвертому выходам задающего генератора, а первым и втором выходами соответственно к маркерному и информационному входам модулятора, выход которого соединен с входом усилителя мощности, а задающий генератор выполнен из последовательно соединенных кварцевого генератора фиксированной частоты, первого и второго делителей частоты и элемента задержки, выход которого является третьим выходом задающего генератора, первым, вторым и четвертыми выходами которого являются соответственно выходы кварцевого генератора фиксированной частоты, второго и первого делителей частоты, а блок преобразования сигнала в двоичный код выполнен из последовательно соединенных вычитающего устройства, временного селектора, двоичного счетчика и сдвигового регистра, последовательно соединенных формирователя маркерного сигнала и формирователя сигнала параллельной записи, маркерный и тактовый входы которого являются соответственно первым выходом и пятым входом блока, первый и второй входы вычитающего устройства являются соответственно первым и вторым входами блока, формирователь интервала отсчетов, вход которого является третьим входом блока, подключен выходом к второму входу временного селектора, вход сброса двоичного счетчика является четвертым входом блока, первый и второй выходы формирователя сигнала параллельной записи соединены соответственно с входами параллельной записи и входом сдвига кода сдвигового регистра, выход которого является вторым выходом блока.
В известном способе определения поправки при измерении глубин [5], в котором поправки определяют по данным измерения скорости распространения звука в воде посредством датчиков, установленных на разных горизонтах и транслирующих сигналы на носитель измерительной аппаратуры по гидроакустическому каналу связи или по проводной линии связи.
Реализация данного способа требует использования дополнительной аппаратуры, что существенно повышает трудоемкость и, кроме того, не обеспечивается непрерывный контроль за изменением средней скорости распространения звука, так как трансляция сигналов от дополнительно установленных датчиков осуществляется циклами при нахождении носителя измерительной аппаратуры в зоне радиуса действия каждого датчика.
В общем случае, при использовании гидроакустических средств решение задачи восстановления рельефа сводится к определению вертикального распределения скорости звука на фоне шумов морской среды. В соответствии с принятой классификацией шумов морской среды (см., например, Соловьев С.Л. Проблемы цунами и ее значение для Камчатки и Курильских островов. // В кн. Проблема цунами. М.: Наука, 1968, с.7-50) шумы морской среды подразделяются на динамические обусловленные приливно-отливными движениями, ветровыми волнами, турбулентными потоками в воде и атмосфере, дождями, прибойными движениями и т.п., шумы от морских судов и прибрежных технических сооружений, сейсмические, к которым помимо сигналов, вызванных тектоническими сдвигами, относят также сигналы, обусловленные тектонической деятельностью и распространением цунами, подледные, обусловленные процессами образования, структурой и динамикой ледового покрова, биологические и тепловые.
На интенсивность помех, вызываемых шумами морской среды, также влияют гидрометеорологические параметры (сила ветра, состояние поверхности моря, характеристики подводного звукового канала, влияющие на изменение скорости звука с глубиной), сезонная изменчивость параметров морской среды (включая изменение бионаселенности и наличие ледового покрова), близость судоходных трасс к району наблюдений, глубины размещения и технические характеристики измерительной аппаратуры (направленность датчиков, разрешающая способность и т.д.).
Кроме того, в вертикальном направлении морская водная среда представляет собой горизонтально неоднородную среду с переменной скоростью звука. При прохождении в вертикальном направлении от поверхности до дна излученный звуковой импульс будет частично отражаться на внутренних неоднородностях водной среды и эти сигналы, также как и сигналы отраженные от дна, будут регистрироваться приемным устройством. В итоге после момента излучения звукового импульса до момента приема сигнала, отраженного от дна, будут регистрироваться сигналы, отраженные от дна и от внутренних неоднородностей водной среды. В результате устройством регистрируются временные ряды плотности звуковой энергии, отраженной от дна и от внутренних неоднородностей водной среды.
В известных способах и устройствах сигналы, принятые от внутренних неоднородностей водной среды, подвергают сложной обработке с целью уменьшения их влияния на конечные результаты измерений. Однако интенсивные звуковые волны в воде не распространяются независимо, а вследствие нелинейных эффектов взаимодействуют между собой. Обычно в акустике дисперсия практически отсутствует и волны близких частот в квадратичном приближении эффективно взаимодействуют лишь только при коллинеарном распространении, когда выполняется условие синхронизма (см., например, Аредов А.А., Дронов P.M., Охрименко Н.Н., Фурдуев А.В. Экспериментальные оценки стационарности подводных шумов океана. // Акустический журнал, 1994, т.40, №3, с.357-361. Курьянов Б.М., Моисеев А.А. Исследование глубинной зависимости низкочастотных шумов океана с помощью буя управляемой плавучести. // Акустический журнал. 1994, т.40, №3, с.487-488. Деревянкина П.И., Капиельсон Б.Г., Любченко А.Ю. Вертикальная структура интенсивности низкочастотного шумового поля мелкого моря. // Акустический журнал. 1994, т.40, №3, с.380-384). Однако при взаимодействии волн, существенно различающихся по частоте, например, если интенсивный высокочастотный звуковой пучок распространяется в среде, возмущенной низкочастотной волной, возможен эффект модуляции высокочастотного пучка, степень которого будет зависеть от величины нелинейного параметра водной среды и угла между векторами распространения волн.
Задачей заявляемого технического решения является повышение достоверности восстановления формы рельефа морского дна при дискретных измерениях глубин посредством гидроакустических средств.
Поставленная задача решается за счет того, что в способе восстановления рельефа морского дна при дискретных измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах, включающем измерение глубины с предварительным определением поправки, обусловленной местом установки гидроакустического средства, определение вертикального распределения скорости звука в воде по отраженным сигналам путем получения данных о триангуляции точек наблюдений с последующей их интерполяцией, восстановление формы рельефа дна, построение поверхности дна, в котором при определении поправки дополнительно измеряют доплеровский сдвиг частоты опорного сигнала гидроакустического лага, определяют скорость подвижного морского объекта посредством приемоиндикатора радио- и спутниковых навигационных систем, при этом поправку определяют в соответствии с зависимостью
где Zэ - глубина, определенная посредством гидроакустического средства;
Vo - средняя вертикальная скорость распространения звука в воде, излучаемого гидроакустическим средством;
Vср - средняя вертикальная скорость распространения звука в воде, излучаемого гидроакустическим измерителем скорости.
Определение вертикального распределения скорости звука в воде выполняют по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженного от дна сигнала с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью U(Z=0, t), где Z - глубина в моменты времени t, a скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния, дополнительно регистрируют низкочастотные волны посредством искусственно возбуждаемых высокочастотных волн накачки, по которым судят о взаимной ориентации взаимодействующих волн и величине параметра нелинейности среды, восстановление формы рельефа выполняют по относительным изменениям высоты рельефа в соответствии с неравенством
|h(r2)-h(r1)|<A|r2-r1|λ,
где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2;
А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1, при этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба, при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируют в виде структуры неориентированного графа с определением длин (весов) ребер графа, а в устройство для осуществления способа, представляющее собой гидролокатор для определения глубин акватории, содержащее функционально соединенные первую и вторую антенны, одна из которых излучающая, а вторая приемная, формирующие приемоизлучающие каналы, вычислитель, блок управления, в котором блок управления соединен с приемоизлучающими каналами, вычислителем, дополнительно введены формирователь сигналов накачки, графопостроитель, параметрический излучающий тракт, который своим выходом соединен с излучающей антенной, а входом с выходом формирователя накачки, который своим входом соединен с выходом блока управления, графопостроитель своими входами соединен с выходами вычислителя и блока управления, соединенным еще одним входом с выходом излучающего преобразователя накачки.
Выполнение оценки точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба позволяет учитывать информацию о погрешности в измерениях как точек измерения, так и погрешности при восстановлении рельефа.
При использовании известных способов решение задачи восстановления рельефа сводится к построению непрерывной двумерной функции, проходящей через измеренные дискретные значения глубины. При этом на первом этапе производится триангулирование точек измерения, т.е. на множестве точек измерения вводится отношения "близости" точек, а на втором этапе строится собственно искомая функция, как композиция элементарных весовых функций (линейных или нелинейных), посредством методов линейной и нелинейной интерполяции: различные сплайты, полиноминальные, крекинг-метод и его модификации и т.д. (Проблемы окружающей среды и природных ресурсов. Обзорная информация. М.: ВИНИТИ, 1999, вып.11, 136 с.). При такой обработке исходной информации свойства рельефа никак не учитываются и в процессе обработки возникают артефакты ложных гребней и ложбин в форме рельефа и, следовательно, именно на этом этапе нарушается морфологический способ восстановления рельефа.
Новыми отличительными признаками заявляемого технического решения являются:
- определение средней вертикальной скорости распространения звука в морской воде путем дополнительного измерения доплеровского сдвига частоты опорного сигнала гидроакустического лага, скорости движения носителя по внешним источникам информации, определение поправки в соответствии с зависимостью
где Zэ - глубина, определенная посредством гидроакустического средства;
Vo - средняя вертикальная скорость распространения звука в воде, излучаемого гидроакустическим средством;
Vср - средняя вертикальная скорость распространения звука в воде, излучаемого гидроакустическим измерителем скорости;
- определение вертикального распределения скорости звука в воде по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженных от дна сигналов с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью U(Z=0, t), где Z - глубина в моменты времени t, а скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния с регистрацией низкочастотных волн посредством искусственно возбуждаемых высокочастотных волн накачки, по которым судят о взаимной ориентации взаимодействующих волн и величине параметра нелинейности среды;
- восстановление формы рельефа выполнят по относительным изменениям высоты рельефа в соответствии с неравенством
|h(r2)-h(r1)|<А|r2-r1|λ,
где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2;
А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1. При этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба;
- при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируют в виде структуры неориентированного графа с определением длин (весов) ребер графа.
В отличие от известных технических решений, в которых определение поправки выполняется путем определения средней вертикальной скорости распространения звука в воде посредством определения гидрологических параметров путем измерения температуры и солености на стандартных горизонтах или путем измерения скорости распространения звука в воде на разных горизонтах путем установки дополнительных датчиков в водной среде, соединенных линией связи с носителем измерительной аппаратуры глубины, в заявляемом техническом решении дополнительно измеряют доплеровский сдвиг опорного сигнала и скорость движения носителя по внешним источникам информации, по которым определяют среднюю вертикальную скорость распространения звука в водной среде, по полученным значениям которой определяют поправку, что обеспечивает возможность непрерывного контроля за изменением средней вертикальной скорости распространения звука в морской воде в процессе выполнения мониторинга за состоянием Мирового океана, упрощает процесс определения средней вертикальной скорости распространения звука в водной среде с требуемой точностью для определения поправок измеренных значений глубин, а также исключает необходимость применения специальной дополнительной аппаратуры.
При использовании данного способа выполняется требование к точности определения глубины при промерных работах, установленное действующим нормативным документом (см., например, Инструкция по промеру (ИП-64), Л., Управление гидрографической службы, 1964.), что обусловлено возможностью измерения доплеровского сдвига опорного сигнала гидроакустического лага и скорости движения носителя измерительной аппаратуры глубины по внешним источникам информации, по которым определяют среднюю вертикальную скорость распространения звука в водной среде. Находящиеся в эксплуатации спутниковые и радионавигационные системы позволяют определить место носителя со средней квадратической погрешностью ±7,8 м, что позволяет определить скорость носителя со средней квадратической погрешностью, равной ±0,037 м/с, а среднюю вертикальную скорость распространения звука в водной среде со средней квадратической погрешностью, равной ±7,5 м/с.
Восстановление формы рельефа дна по дискретным измерениям выполняют путем интегральных преобразований, что не приводит к увеличению ошибок наблюдений в исходных данных при обработке в отличие от известных методов, имеющих дифференциальный характер.
При построении рельефа дна двумерное поле преобразуют в набор однородных полиномов, коэффициенты которых характеризуют пространственную изменчивость в различных масштабах.
Методы обработки наборов однородных полиномов являются наиболее разработанными методами в компьютерной алгебре, а комбинаторный метод анализа геопространственных нолей по точечным измерениям позволяет решать прикладные задачи с учетом пространственно-временной динамики этих полей.
Совокупность новых отличительных признаков из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Техническая реализация заявляемого изобретения поясняется чертежами.
Фиг.1. Структурная схема устройства. Устройство включает формирователь сигналов накачки 1, предназначенный для формирования двухчастотных зондирующих сигналов накачки с заданной длительностью и заданной модуляцией, формирования импульсов синхронизации и сигналов стробирования приемного тракта, параметрический излучающий тракт 2, предназначенный для усиления сигналов накачки по обеим частотам до номинального уровня (при этом в отдельных каналах может осуществляться коррекция фаз амплитуд), излучающий преобразователь накачки 3, предназначенный для преобразования электрических сигналов в акустические сигналы необходимой характеристики направленности, приемную антенну сигналов разностной частоты 4, предназначенную для формирования характеристики направленности для приема и преобразования акустических волн разностной частоты в электрические сигналы, приемный тракт 5, предназначенный для предварительной обработки принятых сигналов и усиления их до уровня, необходимого для регистрации принятых сигналов, графопостроитель 6, блок управления 7 и вычислителя 8.
Фиг.2. Функциональная схема формирователя сигналов накачки. Формирователь сигналов накачки 1 состоит из кварцевого генератора 9 опорной частоты, формирователя 10 периода следования излучаемых импульсов накачки, устройства 11 формирования длительности излучаемого импульса, двух каналов 12 и 13 формирования радиоимпульсов с частотами накачки, основу которых составляют фазовые накопители 14 и 15, представляющие собой накапливающие сумматоры и постоянные запоминающие устройства 16 и 17, цифроаналоговых преобразователей 18 и 19, усилителей мощности 20 и 21, фильтров 22 и 23 нижних частот, арифметико-логических устройств 24, 25, 26 и 27, счетчика 28, накапливающих сумматоров 29 и 30, генератора кодов фазы 31, аналого-цифрового преобразователя 32.
Усилители мощности 20, 21 состоят из четырех идентичных широкополосных блоков, включающих предварительные усилители и усилители мощности мощностью до 4000 Вт каждый, разбитых на две группы по два блока для усиления частот накачки f1 и f2. Перед усилителями установлены четыре фазокомпенсационных устройства. Выходной усилитель выполнен по двухконтактной схеме на мощных транзисторах ТК-152. Предварительный усилитель состоит из операционного усилителя и двух пар комплементарных среднемощных транзисторов.
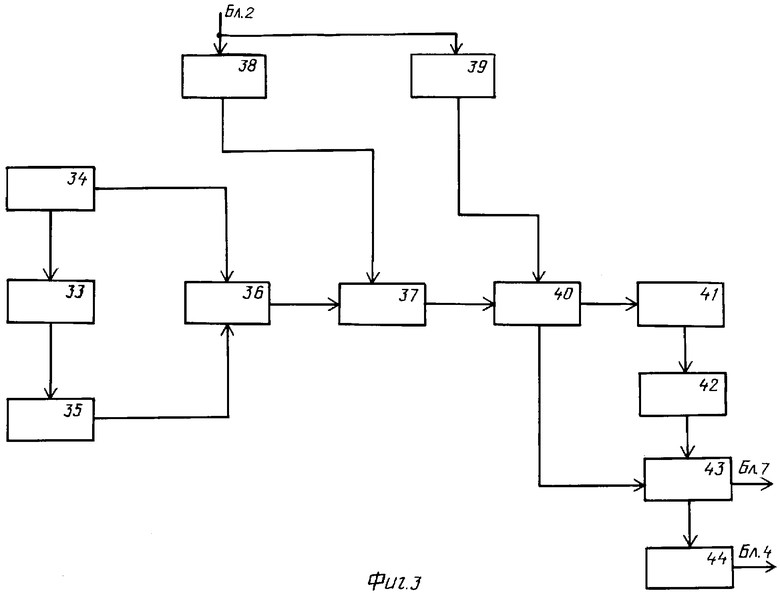
Фиг.3. Блок-схема приемного тракта. Приемный тракт предназначен для приема, усиления и частотной селекции рассеянных сигналов волны разностной частоты в полосе частот 5-50 кГц. Чувствительность его по акустическому давлению составляет не менее 0,001 Па. Приемник выполнен по схеме прямого усиления. Приемник состоит из приемной антенны 33, предназначенной для преобразования акустических сигналов в электрические, полосовых фильтров 34 и 35, антенного усилителя 36, основного усилителя 37, формирователей 38, 39 кодов управления, блока фильтров 40, амплитудного детектора 41, фильтра 42 нижних частот, коммутатора 43, выходного усилителя 44.
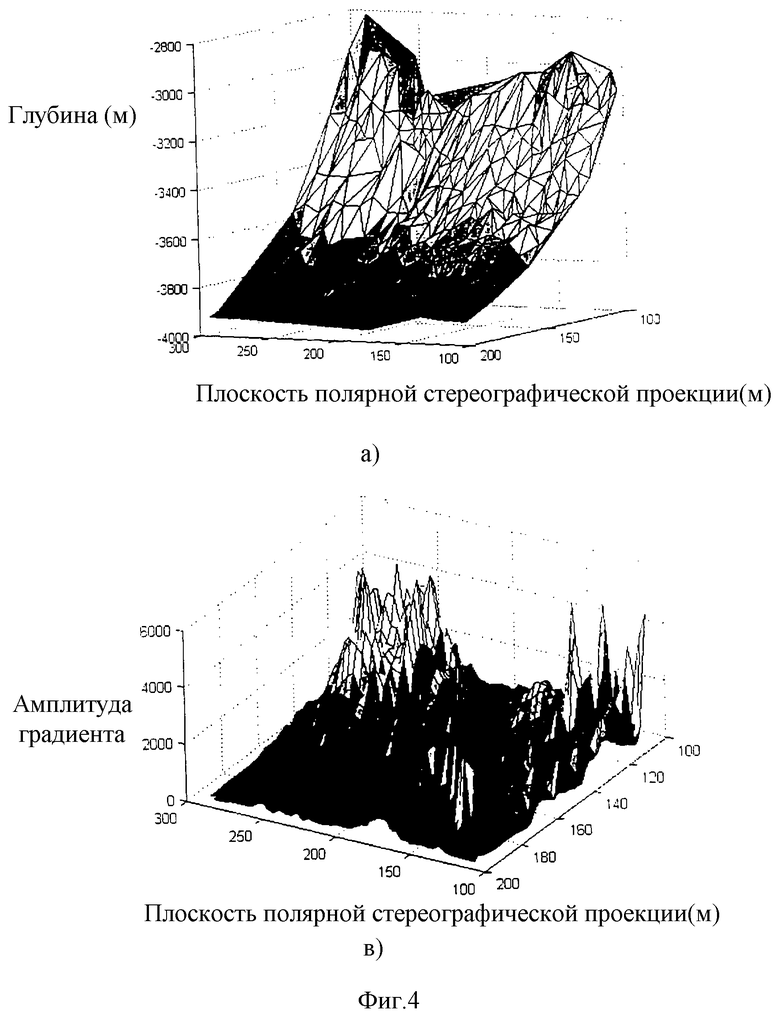
Фиг.4. Пример восстановления рельефа дна на участке континентального склона Северного Ледовитого океана: а) восстановленный по реальным измерениям глубины на основе интегральных преобразований: в) соответствующий ему график амплитуд градиентов, построенный путем численного дифференцирования.
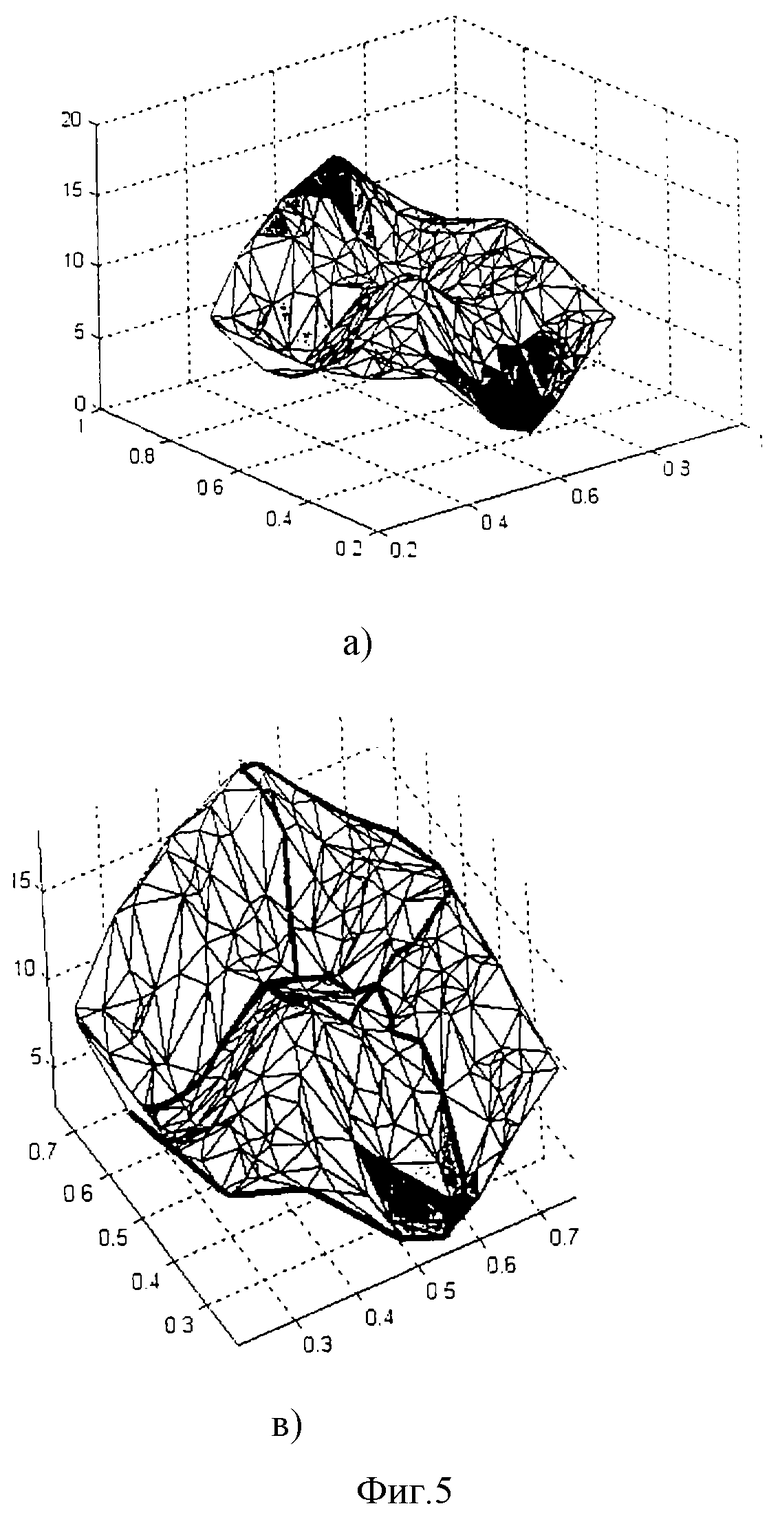
Фиг.5. График восстановления глубины: а) при линейной интерполяции; в) на основе интегральных преобразований.
Формирователь сигналов накачки 1 (фиг.2) работает следующим образом. Кварцевый генератор 9 опорной частоты вырабатывает импульсы с частотой следования 2,04 МГц. Импульсы опорной частоты поступают на вход формирователя 10 периода следования излучаемых импульсов накачки, на входе которого формируются короткие импульсы с заданным периодом следования. Эти импульсы поступают на вход устройства 11 формирования длительности излучаемого импульса. С выхода устройства 11 снимаются прямоугольные импульсы, длительность которых может изменяться с помощью двоичных кодов, поступающих с блока управления 7.
Сформированные таким образом прямоугольные импульсы с заданными длительностью и частотой повторения поступают на два канала 12 и 13 формирования радиоимпульсов с частотами накачки. Основу обоих каналов формирователя составляют фазовые накопители 14 и 15 и постоянные запоминающие устройства 16 и 17. Фазовые накопители управляются тактовыми импульсами генератора 9 опорной частоты и импульсами, поступающими с устройства 11. Восьмиразрядные коды с фазовых накопителей 14 и 15 поступают на адресные входы соответствующих постоянных запоминающих устройств 16 и 17, в которых записаны отсчеты периода синусоиды. Эти отсчеты выбираются в виде восьмиразрядных кодов, подаются на входы соответствующих цифроаналоговых преобразователей 18 и 19, с выходов которых через фильтры 20 и 21 нижних частот радиоимпульсы с прямоугольной огибающей и выбранными частотами заполнения, поступают на входы усилителей мощности 22 и 23.
Изменение частот накачки f1 и f2 производится с помощью двоичных кодов, подаваемых на входы фазовых накопителей 14 и 15 с арифметико-логических устройств 24 и 25 соответственно. Частота излучения может автоматически изменяться через каждый импульс излучения, через два, четыре, восемь или шестнадцать импульсов. Количество импульсов одной частоты задается счетчиком 28. Дискретность перестройки (62,5, 125, 200, 500 или 1000 Гц) выбирается блоком управления 7, устанавливающим соответствующий код на входах накапливающих сумматоров 29 и 30. Аналогово-цифровой преобразователь 32 своими выходными кодами, подаваемыми на нижние входы арифметико-логических устройств 26 и 27, определяет начальную разностную частоту. Изменение кодов осуществляется изменением опорного напряжения на входе аналого-цифрового преобразователя 18. На верхних входах устройств 26 и 27 постоянно заданы коды, определяемые резонансной частотой каждого из двух каналов антенны накачки. В формирователе сигналов накачки 1 имеется возможность формирования внутриимпульсной линейной частотной модуляции с фиксированными частотами. При этом сигнал формируется путем подачи кодов фазы на фазовые накопители 14 и 15 с генератора кодов фазы 31.
В приемном тракте 5 (фиг.3) полосовые фильтры 34 и 35 служат для подавления частот сигналов накачки, а также помех ниже частот рабочего диапазона. Они представляют собой пассивные фильтры верхних и нижних частот, включенных последовательно. Подавление сигналов частот накачки не хуже 60 дБ. Антенный усилитель 36 представляет собой широкополосный малошумящий предварительный усилитель. Для ослабления синфазной помехи последний каскад выполнен в дифференциальном включении. Коэффициент усиления составляет 26 дБ. Основной усилитель 37 трехкаскадный с ручной регулировкой усиления. Регулировка усиления осуществляется цифровыми кодами. Диапазон регулировки составляет 0-80 дБ. Блок фильтров 40 представляет собой набор фильтров нижних и верхних частот, которые с помощью коммутации объединены в полосовые фильтры с переменной полосой пропускания. Управление коммутаторами, а следовательно, и полосой пропускания осуществляется цифровыми кодами. Формирователи кодов 38 и 39 служат для формирования кодов управления коэффициентом усиления основного усилителя 37 и полосой пропускания блока фильтров 40. Линейный детектор состоит из амплитудного детектора 41 и фильтра нижних частот 42 и служит для выделения огибающей рассеянных сигналов волны разностной частоты в динамическом диапазоне 40 дБ. Коммутатор 43 предназначен для выбора отраженного сигнала или его огибающей. Выходной усилитель 44 служит для согласования приемника с внешними устройствами.
Вычислитель 8 включает контроллер, встроенный 8-канальный 16-разрядный АЦП типа AD 7715 с внешним входами для подключения приемного и излучающего каналов и внешних устройств, фильтр линейного предсказания, автономную систему контроля напряжения питания, внутренний температурный датчик на базе кремневого диодного p-n перехода, два компаратора с программируемым опорным напряжением, мультиплексор, последовательный интерфейс стандарта RS-232, три таймера, обеспечивающие измерение частоты относительно опорного кварцевого генератора, и представляет собой процессор с раздельными 14-битной шиной команд и 8-битной шиной данных. Двухступенчатый конвертор позволяет осуществлять выполнение до 35 команд в течение одного машинного цикла. Аналогом является микропроцессор типа PJC 14000.
Блок управления 7 включает центральный модуль, который осуществляет организацию режима измерения сигналов, обработку результатов измерений, формирование сигналов обмена с внешними устройствами и пакета данных в заданном формате, хранение в памяти для последующей обработки. Основными функциями, определяющими алгоритм работы, являются последовательное включение энергопитания и опрос выходных сигналов функциональных блоков в соответствии с заданной программой, осреднение результатов измерения по каждому каналу в соответствии с заданными временными интервалами, введение поправок в результаты измерений, учитывающие дрейф нуля АЦП, отклонение характеристик преобразования от исходной, температурную зависимость характеристик датчиков с представлением данных в виде условных кодов, приведение условных кодов измеренных величин к физическим значениям измеренных параметров в соответствии с алгоритмами обработки данных с учетом коэффициентов, запись и хранение полученных данных в буферной памяти микропроцессора, формирование сообщения установленного формата для передачи на внешние каналы связи. В состав программного обеспечения входят мощный микроассемблер, внутрисистемный и отладочный эмуляторы, универсальный программатор и компилятор. Графопостроитель 6 представляет собой плоттер.
Работа приемного тракта заключается в следующем. Отраженные акустические сигналы поступают на приемную антенну 33, которая преобразует акустическое давление в электрическое напряжение. Преобразованные антенной 33 сигналы поступают на полосовые фильтры 34 и 35, в которых осуществляется частотная селекция сигналов волны разностной частоты. С выходов фильтров 34 и 35 сигналы поступают на вход двуканального дифференциального антенного усилителя 36, в котором осуществляется предварительное усиление сигналов и подавление синфазной помехи и с выхода которого сигнал поступает на вход основного усилителя 37, коэффициент усиления которого зависит от кодов, поступающих на цифровые входы усилителя с формирователя кодов 38. Запирание основного усилителя на время посылки осуществляется инвертированным импульсом посылки с формирователя 38. С выхода основного усилителя 37 усиленный сигнал поступает на вход блока полосовых фильтров 40 с регулируемой полосой пропускания. На цифровые входы блока фильтров 40 необходимый код поступает с формирователя кодов 39. С выхода блока фильтров 40 сигнал подается на вход амплитудного детектора 41, который выделяет модуль знакопеременного сигнала. Продетектированный сигнал с выхода амплитудного детектора 41 поступает на фильтр 42 нижних частот, в котором осуществляется выделение огибающей данного сигнала. Выделенная огибающая отраженного сигнала с амплитудного детектора 41 и отраженный сигнал с блока фильтров 40 поступают на вход коммутатора 43. Выбранный коммутатором 43 тип сигнала через согласующий выходной усилитель 44 подводится к внешним устройствам приемного тракта.
Параметрический излучающий тракт 2 включает антенну накачки, представляющую собой многоэлементную решетку, состоящую из двух двухчастотных каналов каждая. Элементы в каждой подрешетке расположены в порядке чередования типов с разной частотой и рассчитаны так, чтобы обеспечить наибольшую однородность акустического поля по обеим частотам. Активная часть двухчастотной мозаичной антенны выполнена из пьезокерамики стержневого типа. Разделение антенны на четыре канала позволяет добиться получения необходимой мощности и высокой надежности при работе транзисторных усилителей мощности. Антенна накачки имеет круглую форму диаметром активной поверхности 300 мм. Средняя рабочая частота накачки 180 кГц. Диапазон разностных частот 5-50 кГц. Расчетная ширина характеристики направленности на уровне 3 дБ составляет два градуса и постоянна в диапазоне рабочих частот.
Способ реализуется следующим образом. При движении носителя измерительной аппаратуры глубины, например судна, снабженного штатным гидроакустическим лагом, выполняют определение глубин. Синхронно с процессом определения глубин определяют среднюю вертикальную скорость распространения звука в водной среде посредством штатного гидроакустического лага в соответствии с зависимостью
где W - скорость судна, м/с;
f - опорная частота гидроакустического лага, Гц;
Fд - разность частот излучаемого и отраженного акустического сигнала (доплеровский сдвиг частоты), Гц.
Одновременно с определением значений глубины и средней вертикальной скорости распространения скорости звука в воде определяют скорость судна посредством штатных приемоиндикаторов спутниковых или радионавигационных систем с интервалом через пять минут или непрерывно в зависимости от режима работы приемоиндикаторов.
По полученным данным определяют поправку к глубинам, определенным посредством измерителя глубины, в соответствии с зависимостью

Полученные поправки вводят в вычислительное устройство измерителя глубины.
Посредством гидроакустического средства (фиг.1) производят измерения глубин акватории путем излучения гидроакустического сигнала в сторону приема отраженных сигналов с последующей их обработкой (усиление, фильтрация, формирование и т.п.), вычисление глубин по известным алгоритмам, полученным на основании исследований (см. например: Westervelt R.J. Scattering of sound by sound. // J. Acoust. Soc. Am. 1957, vol.2, h 199-203. Westervelt R.J. Parametric acoustic array // Ibid. 1963, vol.35, №4, p.935-937. Наугольник К.А., Рыбак С.Л. О возможности диагностики среды на основе эффектов взаимодействия звуковых волн. // Акустика в океане. / Под ред. Л.М.Бреховских, И.Б.Андреевой. М.: Наука, 1992, с.147-154). В результате исследований получены аналитические выражения для амплитуд (Pk) и индексов фазовой модуляции (Δα) волн комбинационных частот (ωk) и показана возможность регистрации низкочастотных волн с помощью искусственно возбуждаемых высокочастотных волн накачки. В частности для упрощенной модели распространения взаимодействующих низкочастотной волны с амплитудой Ps и частотой ω y высокочастотной волны (Рн, ωн) в одном направлении эти выражения в первом приближении имеют вид
Р(θ, L)=(ε+1)ωkPsPнL/4ρCo 3, Δα=(ε+1)ωkPsL/2ρCo 3,
где θ - угол между направлениями распространения (волновыми векторами кi) взаимодействующих волн: L - длина пути взаимодействия; ε - параметр нелинейности среды ωк=ωн±ωs.
В следующем приближении учитывается взаимодействие комбинационных тонов с высокочастотной волной, приводящее к генерации рассеянной волны на частоте ωs, распространяющейся в направлении низкочастотной волны. По величине этой добавочной волны судят о взаимной ориентации взаимодействующих волн и величине параметра ε.
По измеренным значениям скорости звука в воде в вертикальной плоскости {х, z} определяется поле скорости звука в соответствии с выражением C(x, z)=Co(x, z)+ΔС(х, z), где Со - "опорное" состояние, ΔC - определяемая изменчивая флуктуация. Определение вертикального распределения скорости звука в воде по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, выполняется путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженных от дна сигналов с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью U(Z=0, t), где Z - глубина в моменты времени t, а скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния с регистрацией низкочастотных волн посредством искусственно возбуждаемых высокочастотных волн накачки, по которым судят о взаимной ориентации взаимодействующих волн и величине параметра нелинейности среды.
При обработке временных рядов используется метод деконволюции с использованием алгоритма Левинсона, что позволяет получить оценки коэффициентов авторегрессионной модели с минимальной дисперсией ошибок, а использование алгоритма Левинсона для решения задачи деконволюции наблюдаемого временного ряда дает возможность при минимальных вычислительных затратах определить искомые параметры модели сложно-неоднородной среды (см., например, Додд Р., Эйлбек Дж., Гиббон Дж., Моррис X. Солитоны и нелинейные волновые уравнения. М.: Мир, 1988, 694 с. Петров Ю.П., Сизиков B.C. Корректные, некорректные и промежуточные задачи с приложениями. СПб.: Политехника, 2003, 261 с.).
Процедура определения параметров сложно-неоднородной среды реализуется посредством фильтра линейного предсказания, выполненного в виде оптимального решетчатого фильтра.
Как известно, распространение звуковых волн, возбужденных звуковыми локаторами, представляет собой распространение продольных волн неоднородной стационарной морской среде, когда длина волны много меньше масштаба неоднородности среды. Этот процесс в общем случае описывается одномерным волновым уравнением
ρ(z)∂u2/∂t2-∂/∂z(E(z)∂u/∂z)=0,
где ρ - плотность воды, Е - параметр упругости, u(z, t) - поле продольных волн на глубине z (направление от поверхности ко дну) в момент времени t. Это уравнение для звуковых волн, распространяющихся в среде, которая неоднородна при z>0 и однородна при z≤0, так что ρ и Е при z≤0 равны константам. Скорость звука в воде С(z) является функцией от ρ и Е. Решение задачи определения вертикального распространения звуковых волн посредством звуковых локаторов складывается из двух этапов. Первый этап включает непрерывную регистрацию всех приходящих сигналов, рассеянных от внутренних неоднородностей в морской среде, от момента посылки звукового импульса звуковым локатором до момента прихода отраженного от дна сигнала. На этом этапе получают эмпирическую временную функцию u(z=0, t). На втором этапе выполняют решение обратной задачи рассеяния. Для волнового уравнения по функции u(z=0, t) определяют значения C(z) или, что аналогично, p(z) и E(z).
Известно несколько методов решения обратной задачи рассеяния. Это метод Вентцеля, Крамерса и Бриллюэна, так называемый ВБК-метод, заключающийся в переходе от волнового уравнения с помощью Фурье преобразования к обыкновенному дифференциальному уравнению Гельмгольца и нахождению решения последнего в виде асимптотического ряда (Бреховских Л.М. Волны в слоистых средах. М.: Наука, 1973, 502 с.). Более современные методы решения обратной задачи рассеяния используют переход от одномерного волнового уравнения к одномерному уравнению типа Шридингера. В свою очередь решение уравнения Шридингера осуществляется посредством решения интегрального уравнения Марченко (Додд Р., Эйлбек Дж., Гиббон Дж., Моррис X. Солитоны и нелинейные волновые уравнения. М.: Мир, 1988, 694 с.). Решение интегрального уравнения позволяет оценить вертикальное распространение звуковых волн по эмпирической функции u(z=0, t). Однако решение задачи определения вертикального распространения звуковых волн посредством звуковых эхолокаторов связано с тем, что все известные методы решения обратной задачи рассеяния являются некорректными по Адамару вычислительными задачами. Это значит, что численное решение обратной задачи неустойчиво, т.е. малые ошибки в u(z=0, t), связанные с наличием шума, неизбежно могут привести к значениям C(z), как угодно существенно отличающимся от истинного. В предлагаемом способе эта неустойчивость исключается путем численного обращения больших зашумленных матриц с использованием регуляризирующих алгоритмов Тихонова (Тихонов А.П., Арсенин В.Я. Методы решения некорректных задач. М.: Наука, 1979, 288 с.). Функция C(x, z) определяется по опорным значениям Сij=Co(xi, zj)+ΔC(xi, zj) в узлах прямоугольной сетки (xi, zj), i=1...I, j=1...J.
В результате получаем алгебраическую систему уравнений вида
где m=1...M, amn - коэффициенты аппроксимации, tm - время распространения звука по лучу излучения. При этом коэффициенты аппроксимации выражаются аналитически через интегралы вида  по фрагментам луча в отдельных ячейках.
по фрагментам луча в отдельных ячейках.
Полученная система уравнений решается по универсальному алгоритму метода регуляции по А.И.Тихонову.
Кроме того, посредством устройства для осуществления способа в вычислителе 8 определяется критический уровень звукового давления по каждой исходной частоте, обусловленный влиянием нелинейных эффектов распространения волн накачки, т.е. максимальный уровень накачки по исходным частотам, что позволяет определить максимально возможный уровень звукового давления на разностной частоте, а также интенсивность в точке приема (антенна 33) шумов моря и шума носителя измерительной аппаратуры в соответствии с зависимостью

где Рпо - уровень (амплитуда) приведенных помех, F - значение частоты, на котором проводится зондирование, γпр - коэффициент концентрации приемной антенны 33, τ - длительность импульса, ρ, С - плотность и скорость звука в воде.
По полученным дискретным измерениям значений глубин, а также с учетом коэффициентов рассеяния звука дном, зависящих от характера грунта (коэффициент уменьшается почти в 1000 раз при переходе от скального грунта к илистому, в частности коэффициенты рассеивания соответственно составляют для скального грунта 1,0, крупного песка 0,03 (-15 дБ), мелкого песка 0,01 (-20 дБ), илистого грунта 0,001 (-30 дБ), см. Navigation, 1974, vol.XXII, №85, p.21-30), определяют класс функций, к которому принадлежит рельеф. Проведенные исследования формы рельефа в различных пространственных масштабах показали, что относительные изменения высоты рельефа степенным образом связанны с пространственным масштабом в виде
|h(r2)-h(r1)|<A|r2-r1|λ,
где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2;
А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1.
При этом искомая функция H(r) выражается в виде обратного преобразования Фурье
Н(x, y)=J(F(ζ)), где ζ - оператор обратного преобразования Фурье,
Здесь i - мнимая единица, ξ=(cosϕ, sinϕ).

Здесь
 - преобразование Радона функции H(x, y) на (x, y)∈R×R= Ω, т.е. интегральное преобразование, относящееся к функции Н(x, y) на Ω ее интегралы по всевозможным прямым (относительно евклидовой длины): x=-tsinϕ+pcosϕ; y=tcosϕ+psinϕ.
- преобразование Радона функции H(x, y) на (x, y)∈R×R= Ω, т.е. интегральное преобразование, относящееся к функции Н(x, y) на Ω ее интегралы по всевозможным прямым (относительно евклидовой длины): x=-tsinϕ+pcosϕ; y=tcosϕ+psinϕ.
Для финитной функции Н(x, y) в односвязной области Ω точность оценки будет лучше точности традиционных процедур интерполяции.
При построении рельефа дна на графопостроителе 6 непрерывную область акватории с измеренными глубинами дискретизируют посредством узлов регулярной сетки. Затем определяют граф, задавая связи (ребра графа) на этой сетки. Связи определяются путем индексирования узлов регулярной сетки с помощью дерева Фарадея-Коши.
Обработка исходных наблюдений при этом включает процедуру введения координат (упорядочения) точек измерения - триангуляцию. При этом поверхность подменяется триангуляционной сетью - неориентированным графом. Структура графа (фиг.5) представляет информацию только об упорядочении пространственных координат-точек с измеренными глубинами. Модельной функцией нахождения структурных линий на поверхности рельефа - гребней и ложбин, является функция
H(x, y)=3(1-x)2exp(-x)2-(y+1)2-10(x/5-x3-y5)exp(-x2-y2)-1/3exp(-(x+1)2-y2),
в области которой находятся точки наблюдений (измерений). При использовании известных способов восстановления рельефа (например, триангуляция Делоне и линейная интерполяция) получим график в виде функции, представленной на чертеже (фиг.5а). При предлагаемом способе триангуляционная сетка точек измерении, описываемых функцией Н(x, y), строится в виде взвешенного неориентированного графа. При этом гребни и ложбины соответствуют путям на ребрах этого графа с минимальной длиной. Эти минимальные пути определяются посредством алгоритма Дейкстры - поиска кратчайших путей на графе. В результате получим график функции в виде, представленном на чертеже (фиг.5в). Структура графа с точки зрения представления информации о геопространственном поле в ЭВМ ,как поверхности, является дискретной информационной структурой, соответствующей дискретной форме внутреннего функционирования ЭВМ.
Далее определяют погрешность Θ(Н) восстановления рельефа в виде максимального значения абсолютной величины разности между истиной поверхностью и восстановленной
где K - общее число первых моментов, обеспеченных точностью. Точности оценки моментов δ(Ik) будут определяться структурой расположения точек измерения.
Для оптимального распределения точек (измерений), которые всегда можно определить на исходном множестве точек (см. например. Соболь И.М. Многомерные квадратурные формулы и функции Хаара. М.: Наука, 1969, с.288.) с точностью оценки момента для нормированной функции в соответствии с выражением δ(Ik)≤2/Nk.
Восстановление формы рельефа морского дна может выполняться после каждой серии дискретных измерений, что позволяет данный способ отнести к средствам объективного контроля в отличие от известных способов. Эффективность восстановления формы рельефа по дискретным измерениям определяется тем, что он основан на интегральных преобразованиях, тем самым ошибки не увеличиваются как в известных способах. Существенным преимуществом заявляемого способа и устройства для его осуществления является возможность точного измерения координат рассеивающих слоев.
Применение метода деконволюции при обработке временных рядов позволяет получить оценки коэффициентов авторегрессионной модели с минимальной дисперсией ошибок. Использование алгоритма Левинсона для решения задачи деконволюции наблюдаемого временного ряда дает возможность при минимальных вычислительных затратах определить искомые параметры модели сложно-неоднородной среды. Процедура определения параметров сложно-неоднородной среды реализована с помощью фильтра линейного предсказания, выполненного в виде оптимального решетчатого фильтра.
Реализация заявляемого способа технической трудности не представляет, так как для его осуществления используются штатные измерительные устройства (измеритель скорости, приемоиндикатор спутниковой или радионавигационной системы), установленные на носителе (судне) измерительной аппаратуры, а устройство для осуществления способа реализуется на доступной элементной базе, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применимость".
Источники информации
1. Авторское свидетельство СССР №1103171.
2. Патент РФ №2045081 С1.
3. Авторское свидетельство №1829019 A1.
4. Авторское свидетельство СССР №1770770.
5. Матвиенко В.П., Тарасов Ю.Ф. Дальность действия гидроакустических средств. Л.: Судостроение, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА | 2010 |
|
RU2436134C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |

Изобретение относится к области гидроакустики и может быть использовано для восстановления формы рельефа морского дна. Сущность: измеряют глубину посредством гидроакустических средств, расположенных на подвижных морских объектах. Определяют скорость подвижного морского объекта посредством приемоиндикатора радио и спутниковых навигационных систем. Определяют вертикальное распределение скорости звука в воде. Восстанавливают форму рельефа дна. Строят поверхность дна. Для реализации способа предложено устройство, содержащее излучающую и приемную антенны, блок управления, вычислитель, формирователь сигналов накачки, графопостроитель, параметрический излучающий тракт. Технический результат - повышение достоверности способа. 2 н.п. ф-лы, 5 ил.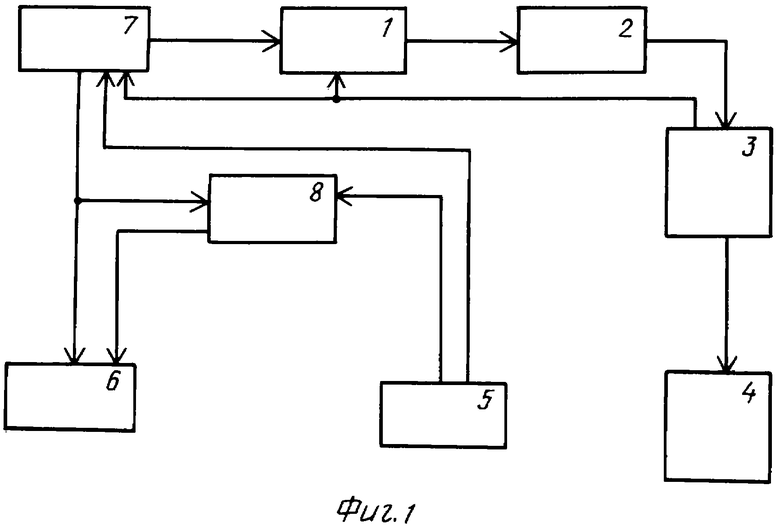
|h(r2)-h(r1)|<A|r2-r1|λ, где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2; А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1, при этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба, при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируются в виде структуры неориентированного графа с определением длин (весов) ребер графа.
| RU 2004134202 А, 10.05.2006 | |||
| RU 2004133307 A, 27.04.2006 | |||
| Способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления | 1991 |
|
SU1829019A1 |
| Акустический зонд для измерения скорости звука в море | 1990 |
|
SU1770770A1 |
| JP 60143795 A, 30.07.1985. | |||

