Изобретение относится к измерительной технике и может быть использовано для коррекции статических характеристик измерительных преобразователей, у которых можно выделить несколько измерительных каналов, обладающих нелинейными передаточными функциями и подверженных взаимному влиянию.
В настоящее время известны способы коррекции статических характеристик измерительных преобразователей, у которых можно выделить несколько измерительных каналов, оказывающих взаимное влияние друг на друга [1]. Устранение взаимного влияния каналов друг на друга осуществляют путем измерения влияющего фактора с помощью отдельного датчика, воспринимающего только влияющий фактор, и последующей аддитивной и(или) мультипликативной коррекции влияния помехи. Данные способы коррекции взаимного влияния каналов и нелинейности их характеристик являются аппаратными, что приводит к усложнению устройств. Кроме того, аппаратные способы коррекции, как правило, являются узкодиапазонными и сложны в настройке.
Известен способ коррекции статических характеристик интегральных тензопреобразователей [2], использующий для балансировки, градуировки, коррекции температурного дрейфа нуля и чувствительности измерительного канала пассивные и активные схемы, предполагающие включение в состав мостовой схемы активных сопротивлений и (или) термисторов или включение самой мостовой схемы в состав некоторой активной схемы. Исключение влияния температуры на канал давления достигают при этом за счет введения явного или неявного канала измерения температуры, обеспечивающего или соответствующую коррекцию характеристик канала давления, или термостабилизацию всего преобразователя. Данные способы коррекции статических характеристик преобразователей сложны в реализации и настройке и, кроме того, наилучшие результаты достигают только в ограниченном диапазоне входных величин.
Целью изобретения является линеаризация характеристик каналов измерительного преобразователя, устранение их взаимного влияния друг на друга, получение информации о дополнительном параметре, упрощение устройств измерительных каналов, формализация и упрощение задачи коррекции статических характеристик измерительных преобразователей.
Поставленная цель достигается тем, что измеряют значения выходных величин измерительного преобразователя при различных комбинациях его входных величин, одна из которых является измеряемой физической величиной, а другая - помехой по отношению к первой, по результатам измерений формируют математическую модель преобразователя в виде наборов коэффициентов, каждый из которых однозначно описывает поверхность передаточной функции своего измерительного канала, определяют линии пересечения поверхностей передаточных функций с соответствующими плоскостями выходных величин каналов и их проекции на плоскость входных величин, а входные величины каждого канала в условиях их взаимного влияния и нелинейности передаточных функций определяют вычислением координат точки пересечения проекций. Один из вариантов определения координаты этой точки заключается в итеративном сужении области возможных значений входных величин при заданных значениях выходных величин.
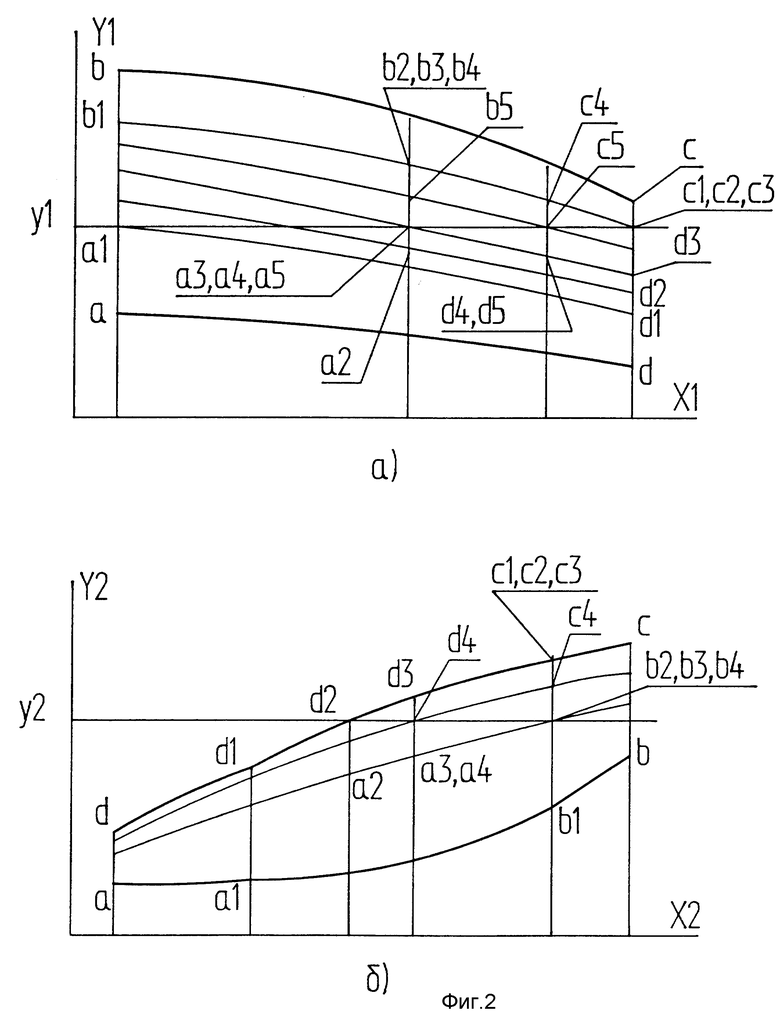
Сущность предлагаемого способа коррекции статических характеристик измерительных преобразователей иллюстрируется фиг. 1 и 2. Зависимость выходного сигнала одного из каналов преобразователя от входных величин в общем случае представляет собой поверхность y1 = f1(x1,x2), представленную на фиг. 1. При конкретном значении выходной величины данного канала значения входных величин связаны между собой уравнением линии ab пересечения плоскости y1 = consti и заданной поверхности передаточной функции. Другой канал измерительного преобразователя характеризуется своей поверхностью передаточной функции y2 = f2(x2,x1). При тех же значениях входных величин значение выходной величины этого канала будет y2 = const2. При этом входные величины будут связаны уравнением линии cd пересечения плоскости y2 = const2 и поверхности передаточной функции y2 = f2(x2,x1). Значения входных величин могут быть определены как координаты точки А пересечения проекций a'b' и c'd' линий ab и cd на плоскость Х1Х2.
Для описания поверхностей передаточных функций необходимо проведение тестового эксперимента, который предполагает измерение значений выходных величин при различных комбинациях значений входных величин. Объем данного эксперимента (количество входных значений) определяется методом аппроксимации экспериментальных данных. Так, например, при использовании метода наименьших квадратов и аппроксимации данных с помощью полиномов второй степени необходимо не менее трех значений каждой входной величины.
Немаловажное значение имеет форма задания поверхности. Для введения коррекции необходимо, чтобы для любого разрешенного значения входного параметра без труда могла быть получена линия пересечения плоскости х1 = const (или х2 = const) и поверхности передаточной функции. Один из вариантов задания поверхности y1 = f1(x1,x2) заключается в следующем. Для всех значений величины х2, участвовавших в тестовом эксперименте, проводится аппроксимация функций y1 = f(x1). Результатом аппроксимации будут значения параметров функции f(x1), индивидуальные для каждого значения х2, т.е. тем самым будут описаны линии пересечения плоскостей х2 = const и поверхности передаточной функции. Для описания этих линий при произвольных значениях х2 необходимо каждый параметр функции f(x1) аппроксимировать по величине х2. В результате каждый параметр функции f(x1) будет описан, в свою очередь, группой параметров, которые в конечном счете и будут задавать поверхность передаточной функции. Так, если функции f(x1) будут представлять собой полиномы второй степени, то число параметров каждого уравнения будет равно трем. Если каждый из этих параметров аппроксимировать полиномами второй степени по величине х2, то получим девять коэффициентов, однозначно описывающих поверхность y1 = f1(x1,x2). Аналогичным образом задается поверхность передаточной функции y2 = f2(x2, x1). В общем случае вид, порядок передаточных функций и количество коэффициентов для поверхностей может быть различным.
Таким образом, измерительный преобразователь описан математической моделью, представляющей собой два набора коэффициентов, задающих поверхности передаточных функций каналов преобразователя.
Рассмотрим теперь, каким образом по значениям выходных величин измерительного преобразователя определить значения входных величин. Один из способов решения этой задачи заключается в итеративном сужении области возможных значений входных величин при заданных значениях выходных величин. Последовательность определения значений входных величин удобно рассматривать, пользуясь проекциями поверхностей на плоскости X1Y1 и X2Y2, представленными на фиг. 2. Анализ фиг. 2 показывает, что область допустимых значений входных величин ограничена фигурами abed. Линии ab и dc соответствуют минимальному и максимальному значениям величины X1, а линии ad и bc - минимальному и максимальному значениям величины Х2. Предположим, что в некоторый момент времени величины Y1 и Y2 приняли соответственно значения y1 и y2. В этом случае границы значений величины Х2 сужаются до линий a1d1 и b1c1, т.е. область допустимых значений входных величин уменьшится до фигуры a1b1c1d1. Данные границы переносят на фиг. 2, б и перемещают нижнюю границу величины X1 до линии а2b2, а нижнюю границу величины Х2 - до линии a2d2. Новые границы вновь переносят на фиг. 2, а и осуществляют их дальнейшую коррекцию. Перенесение границ диапазона изменения входных величин с одного рисунка на другой сопровождается определением параметров соответствующей плоской линии и вычислением координат точек пересечения линий на плоскости. Данный процесс является итерационным и сходящимся. Критериями выхода из итерационного процесса могут быть, например, количество циклов, приведенная погрешность приближения границ изменения входных величин к точке математического ожидания этих границ и т. п. Результатом итерационного процесса будут координаты точки пересечения проекций на плоскость Х1Х2 линий пересечения поверхностей передаточных функций и соответствующих плоскостей значений выходных величин, т.е. значения входных величин х1 и х2.
Таким образом, по значениям выходных величин измерительного преобразователя и заранее определенным параметрам его математической модели определяют значения входных величин в условиях их взаимного влияния и нелинейности передаточных функций. Выделение дополнительного измерительного канала, подверженного одновременному воздействию основной входной величины и помехи, позволило без дополнительного датчика осуществлять измерение значения помехи как дополнительного информационного параметра. Использование данного способа не требует какого-либо усложнения измерительного преобразователя или включения его в более сложную систему, что упрощает устройства измерительных каналов. Предлагаемый способ позволяет формализовать и упростить задачу коррекции статических характеристик измерительных преобразователей, т.к. автоматически решает без какой-либо настройки или подбора элементов проблемы линеаризации характеристик измерительного преобразователя, балансировки, градуировки, уменьшения дрейфа нуля и изменения чувствительности от влияния дополнительного параметра. Тем самым достигается поставленная цель изобретения.
В реальных условиях поверхности функций преобразования, задаваемые математической моделью и точками тестового эксперимента, не совпадают, т.е. существует погрешность аппроксимации. По своему характеру данная погрешность носит систематический характер и может быть учтена при обработке результатов измерения. Значение и знак этой погрешности могут быть определены как разность значений входных величин тестового эксперимента и значений, рассчитанных по параметрам математической модели для соответствующих комбинаций значений выходных величин. Для промежуточных значений входных величин погрешность определяется путем интерполяции.
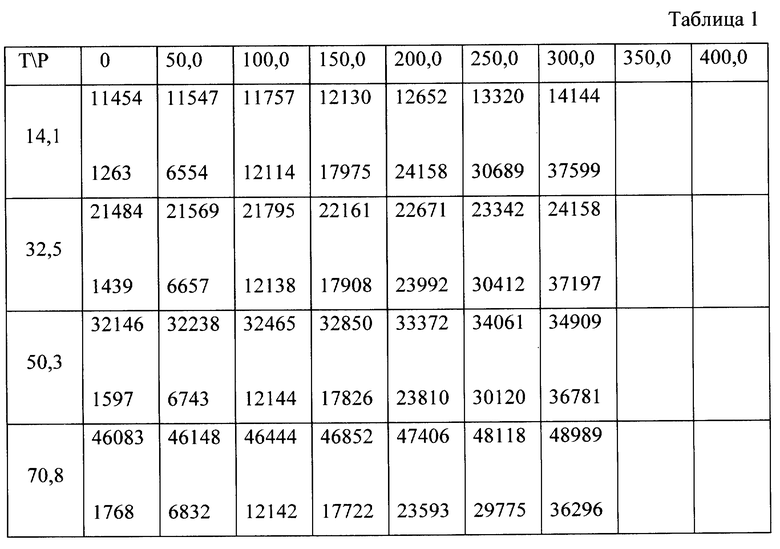
Предлагаемый способ коррекции статических характеристик измерительных преобразователей прошел апробацию при работе с интегральными тензопреобразователями давления типа Д25 и Д100. Исследованию подверглись более тридцати преобразователей. Основной входной величиной являлось давление, дополнительным параметром - температура. Делитель напряжения, образованный термостабильным резистором и диагональю питания датчика, питался от источника стабильного напряжения. Основная выходная величина представляла собой напряжение на измерительной диагонали датчика, а дополнительная выходная величина - напряжение на диагонали питания датчика. Выходные напряжения преобразовывались дополнительным преобразователем в код. При проведении тестового эксперимента использовались манометр грузопоршневой МП-600 кл.точн. 0,05, термостат УТ-15, термометр ртутный кл. точн. 0,1. Типичные результаты тестового эксперимента сведены в табл. 1, где значения давления указаны в атмосферах, значения температуры - в градусах Цельсия, значения выходных величин - в кодах, причем верхнее значение соответствует коду дополнительного канала, а нижнее значение - коду основного канала.
Аппроксимация поверхностей передаточных функций осуществлялась полиномами второго порядка методом наименьших квадратов. Полученные наборы коэффициентов математической модели представлены ниже:
С00;С10;С20: -1.0437327253Е+03 -1.0655337556Е-01 7.7221838546Е-07
С01;С11;С21: 9.5501426982Е-01 7.7356227973Е-06 6.7730079228Е-11
С02;С12;С22: -3.5997795282Е-06 -3.1194760290Е-11 1.8491267834Е-17
D00;D01;D02: -8.8995664799Е+02 -1.4100355719Е-04 -6.3623181430E-07
D10;D11,D12: 2.0983066392E-01 3.2185055454E-08 5.0419719258E-12
D20;D21;D22: -7.9963268745E-07 -9.6265634850E-13 -6.6851897337E-18
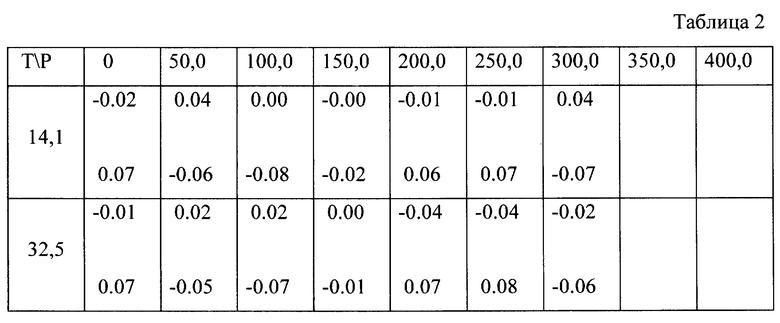
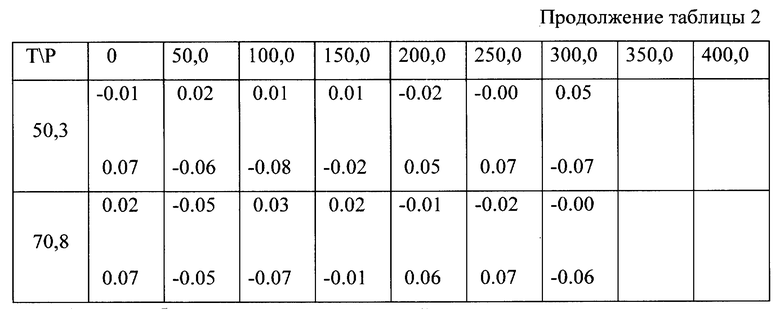
С помощью параметров математической модели во всех точках тестового эксперимента была решена задача определения пар значений давления и температуры по полученным парам кодов выходных величин преобразователя. Выход из итерационного процесса осуществлялся при достижении приведенной погрешности границ изменения давления значения 0,01%. Это условие выполнялось при трех итерациях. За расчетные значения давления и температуры принимались математические ожидания границ изменения соответствующего параметра в последнем цикле итераций. В каждой точке тестового эксперимента были рассчитаны приведенные погрешности аппроксимации. Результирующие значения погрешностей в процентах сведены в табл. 2, причем, верхняя цифра характеризует приведенную погрешность аппроксимации для канала температуры, а нижняя - для канала давления.
Тензопреобразователь, использовавшийся в тестовом эксперименте, имел следующие паспортные характеристики:
Номинальное значение диапазона изменения давления, кгс/см2 - 250
Начальное значение выходного сигнала при нулевом значении измеряемого параметра, мВ - 2,12
Максимальное значение выходного сигнала, соответствующее номинальному значению,1 измеряемого параметра, мВ, - 366
Нелинейность выходного сигнала по абсолютной величине, не более, % диапазона - 0,4
Изменение начального значения выходного сигнала на каждые 10oC, не более, мВ/10oC - 2,0
Отклонение температурной зависимости начального значения выходного сигнала тензопреобразователя от линейной зависимости, не более, мВ - 0,7
Изменение диапазона выходного сигнала на каждые 10oC не более, % диапазона/10oC - -0,15+-0,65
Как видно из сопоставления табл. 2 и паспортных характеристик тензопреобразователя, использование предлагаемого способа коррекции статических характеристик позволило одновременно существенно уменьшить погрешности, связанные с нелинейностью передаточных функций, и погрешности взаимного влияния каналов преобразователя. Вместе с этим появилась возможность измерения температуры в качестве дополнительного параметра. Улучшение статических характеристик не потребовало практически никакого схемного усложнения измерительных каналов. Математический аппарат по созданию модели преобразователя и пересчету значений выходных величин в значения измеряемых параметров является универсальным для данного класса преобразователей и может быть использован без какого-либо изменения для любого представителя класса. Процедура коррекции достаточно проста и сводится к проведению тестового эксперимента и вводу его результатов в ЭВМ, т.е. не требует никаких операций по подгонке или настройке элементов схемы. Индивидуальные параметры математической модели и погрешности аппроксимации выдаются автоматически.
Предлагаемый способ коррекции статических характеристик измерительных преобразователей может быть использован в различных отраслях промышленности, где используются измерительные преобразователи, воспринимающие, наряду с основной физической величиной, дополнительные величины. В частности, изобретение может найти применение в машиностроении, приборостроении, нефтяной и нефтеперерабатывающей промышленности, в медицине и других отраслях народного хозяйства. В настоящее время данный способ реализован в глубинных приборах для измерения давления и температуры в скважинах.
Преимуществами предлагаемого способа коррекции статических характеристик измерительных преобразователей являются возможность устранения взаимного влияния каналов измерительного преобразователя друг на друга; возможность минимизации погрешности нелинейности за счет правильного выбора вида и порядка аппроксимирующих функций; возможность описания передаточных функций каналов преобразователя функциями различного вида и порядка в зависимости от требуемой погрешности аппроксимации; максимальное упрощение электронных каналов измерительного преобразователя за счет освобождения его от функций коррекции и линеаризации. Основное требование к каналам преобразователя - обеспечение временной стабильности их передаточных функций; перенесение функций коррекции взаимного влияния каналов и линеаризации его передаточных функций на ЭВМ; возможность формализации и автоматизации процедур градуировки и поверки преобразователей; возможность контроля стабильности и прогнозирования процессов старения преобразователей по эволюции математических моделей.
1. Левшина Е.С., Новицкий П.В. Электрические измерения физических величин.-Л.: Энергоатомиздат, 1983, с. 103 и 104
2. Ваганов В.И. Интегральные тензопреобразователи.-М.: Энергоатомиздат, 1983, с. 76-94, 127-135 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2002 |
|
RU2199088C1 |
| СПОСОБ КОРРЕКЦИИ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2012 |
|
RU2503968C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1997 |
|
RU2125287C1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 1993 |
|
RU2085033C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ И ТЕМПЕРАТУРЫ ОДНИМ ДАТЧИКОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2091578C1 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ДАВЛЕНИЯ И ТЕМПЕРАТУРЫ В СКВАЖИНЕ ОДНИМ ДАТЧИКОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2096609C1 |
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2002 |
|
RU2199089C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОФИЛЕЙ ЛОПАТОК ГИДРАВЛИЧЕСКИХ ТУРБИН ТУРБОБУРОВ | 1993 |
|
RU2098656C1 |
Изобретение относится к измерительной технике и предназначено для использования при коррекции статических характеристик измерительных преобразователей с несколькими измерительными каналами, обладающими нелинейными передаточными функциями. В способе коррекции статических характеристик, заключающемся в их балансировке, градуировке, уменьшении дрейфа нуля и изменении чувствительности от влияния дополнительного параметра, измеряют значения выходных величин при различных комбинациях входных величин, одна из которых является измеряемой физической величиной, а другая - помехой по отношению к первой. По результатам измерений формируют математическую модель преобразователя в виде наборов коэффициентов, каждый из которых однозначно описывает поверхность передаточной функции своего канала, определяют линии пересечения поверхностей с соответствующими плоскостями выходных величин каналов и их проекции на плоскость входных величин, а выходные величины каждого канала определяют вычислением координат точки пересечения проекций. Использование изобретения позволяет линеаризовать характеристики каналов преобразователя, устранить их взаимное влияние и получить информацию о дополнительном параметре. 2 ил., 2 табл.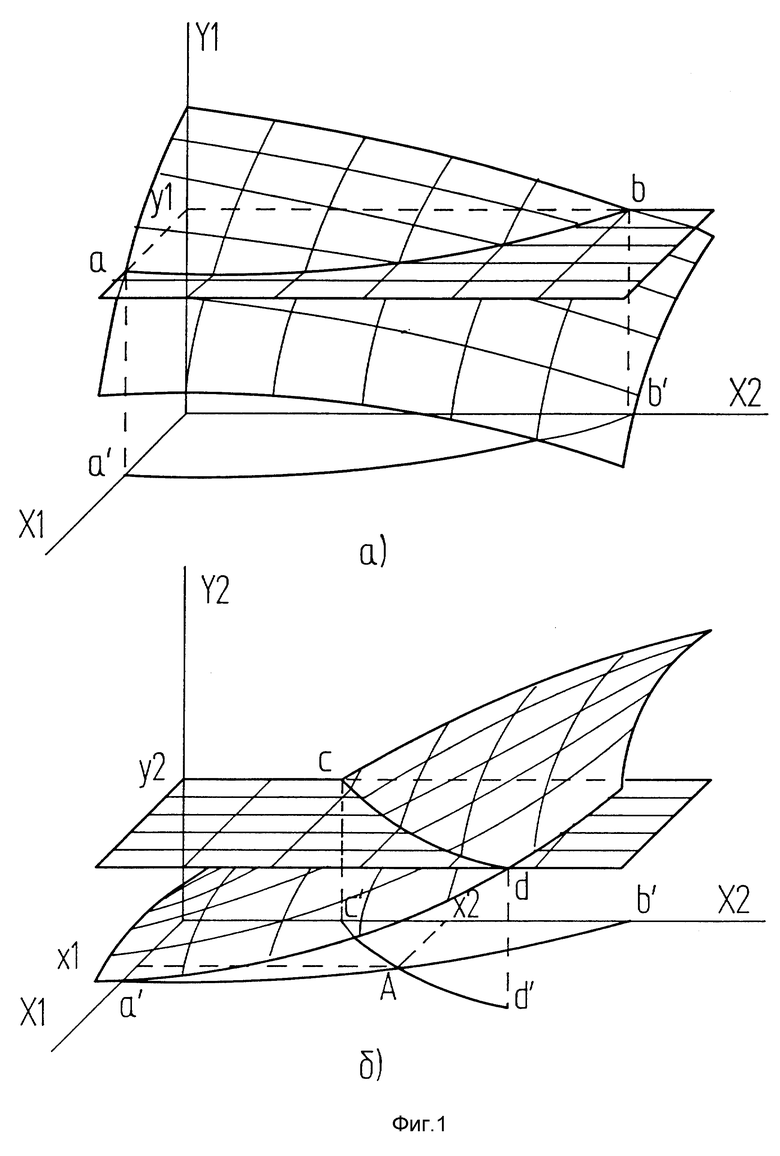
Способ коррекции статических характеристик измерительных преобразователей, заключающийся в их балансировке, градуировке, уменьшении дрейфа нуля и изменении чувствительности от влияния дополнительного параметра, отличающийся тем, что измеряют значения выходных величин измерительного преобразователя при различных комбинациях его входных величин, одна из которых является измеряемой физической величиной, а другая - помехой по отношению к первой, по результатам измерений формируют математическую модель преобразователя в виде двух наборов коэффициентов, каждый из которых однозначно описывает поверхность передаточной функции своего измерительного канала, определяют линии пересечения поверхностей передаточных функций с соответствующими плоскостями выходных величин каналов и их проекции на плоскость входных величин, а входные величины каждого канала в условиях их взаимного влияния и нелинейности передаточных функций определяют вычислением координат точки пересечения проекций.
| Ваганов В.И | |||
| Интегральные тензопреобразователи.-М.:Энергоатомиздат, 1983, с.76-94, 127-135 | |||
| Устройство для автоматической коррекции погрешностей измерительного преобразователя | 1985 |
|
SU1273857A1 |
| и др.) | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

