Настоящее изобретение имеет целью достичь путем соответствующего выбора конструктивных элементов полного динамического уравновешивания рудничной подъемной установки, т. е. обеспечить на всем протяжении подъема, при постоянном радиусе навивки, постоянное значение движущего усилия на ободе барабана лебедки, равное весу полезного груза, увеличенному на величину вредных сопротивлений.
Наличие полного динамического уравновешивания имеет большое значение, так как при этом резко снижается пиковая нагрузка, что особенно важно для малых электрических станций, и обеспечивается работа двигателя без перегрузок.
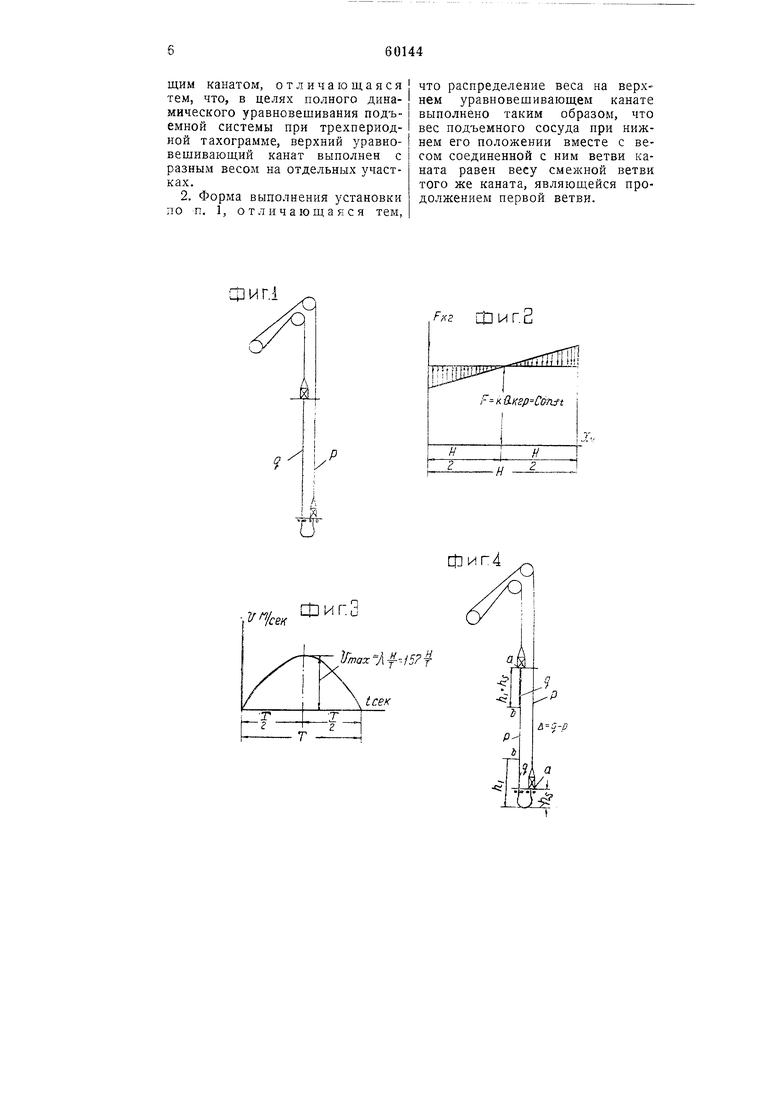
На чертеже фиг. 1 изображает схему динамически уравновешенной рудничной подъемной установки с нижним тяжелым уравновешивающим канатом по системе академика М. М. Федорова; фиг. 2- диаграмму движущих усилий на ободе барабана динамически уравновешенной подъемной установки, фиг. 3 - тахограмму такой
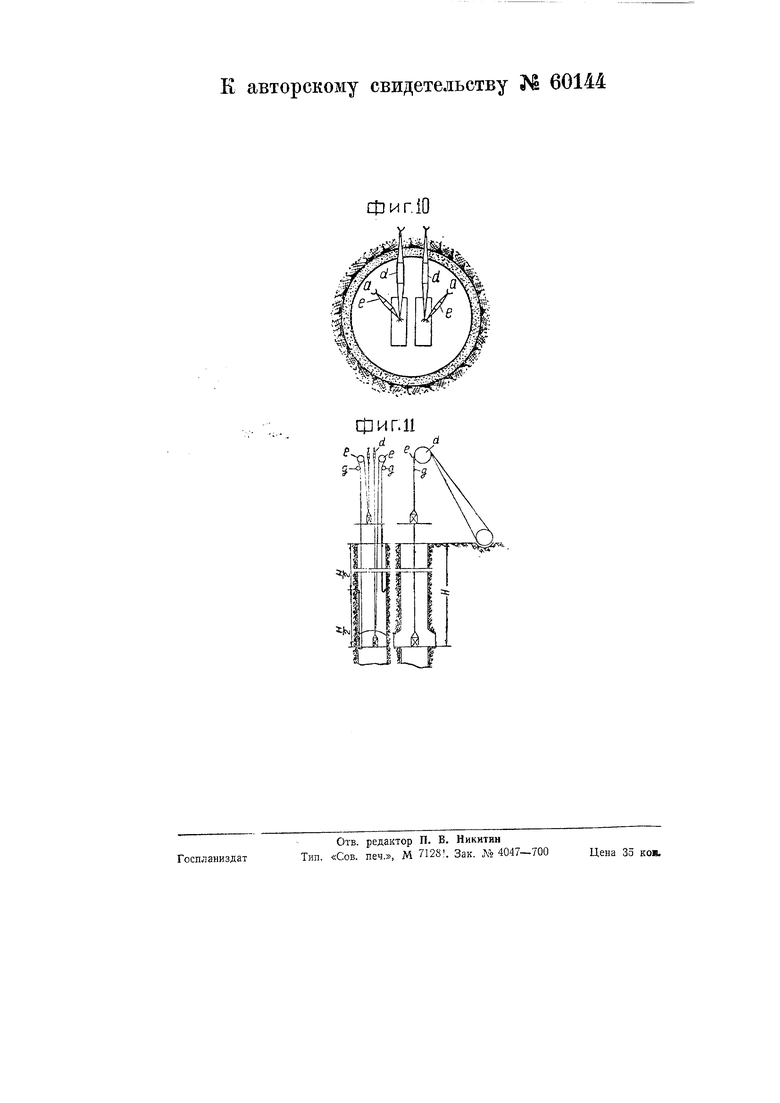
установки, фиг. 4 - динамически уравновешенную систему с нижним уравновешивающим канатом разного веса на отдельных участках; фиг. 5 - диаграм.му движущих сил системы по фиг. 4; фиг. 6 тахограмму этой системы; фиг. 7- диаграмму ускорений; фиг. 8 - диаграмму мощности; фиг. 9 -схему динамически уравновешенной подъемной системы с верхним уравновешивающим канатом неодинакового веса на отдельных участках; фиг. 10 - систему по фиг. 9 в плане; фиг. 11-вариант системы по фиг. 9, Как известно, академик М. М. Федоров предложил осуществить полное динамическое уравновешивание подъемной системы с постоянным радиусом навивки путем подвески тяжелого нижнего уравновешивающего каната (фиг. 1), вес которого выбирается в зависимости от заданной продолжительности одного подъема. Диаграмма движущих усилий на ободе барабана для такой установки, при неопрокидных клетях, показана на фиг. 2, а тахограмма представляющая собой симметричную синусоиду,- на фиг. 3.
Предложенная академиком М. М. Федоровым идея полного динамического уравновешивания рудничного подъема не получила практического осуществления до настоящего времени, так как конструктивное решение этой проблемы имеет ряд недостатков, а именно.
1.Значительный вес хвостового каната увеличивает вес и диаметр головного кн ната,а следовательно,увеличивает диаметр и размеры барабана рудяичной подъемной машины.
2. Обеспечение на ободе барабана на протяжении всего подъема постоянного (фиг. 2) движущего усилия F - kQrp (где Qrp - вес полезного груза, k - грузовой коэфицнент, учитывающий влияние вредных сопротивлений движению подъемной системы) не позволяет все же выбирать тяговое (строительство) усилие Fm для расчета мощности двигателя равным численному значению Qrp.
Действительно для подъемных установок с неопрокидными клетями, при наличии кулаков на приемных площадках, величина тягового усилия выбирается из условий допустимой перегрузки двигателя при подъеме одной клети над кулаками, когда вторая клеть неподвижна и установлена на кулаках.
Поэто.му в этих случаях всегда jPm -AQrp, Мало того, наличие тяжелого хвостового каната приводит к увеличению численного значения F, так как при этом, по сравнению со случаем подвески уравновещивающего хвостового каната, будет возрастать экстренное усилие для подъема клети над кулаками. Поэтому мощность двигателя, при наличии тяжелого хвостового каната, не уменьшается, а возрастает.
В рассматриваемой системе подъема период установившегося движения отсутствует. Тяговое усилие Fff, AQrp даже при скиповом подъеме и подъеме с неопрокидными клетями и качающимися площадками на одном из приемных гооизонтоБ. В виду того, что движение совершается по двухпериодной тахограмме, при которой ухудщаются условия охлаждения двигателя, а мощность двигателя лимитируется условиями нагревания, эффективное усилие всегда больше численного значения AQ гр (фиг. 3).
3. Общий коэфициент полезного действия рудничной подъемной установки, оборудованной асинхронным двигателем, весьма невелик, так как при двухпернодной тахограмме (фиг. 3) сильно увеличиваются потери на нагревание реостата.
Величина общего коэфициента полезного действия рудничной подъемной установки, оборудованной асинхронным двигателем, увеличивается с уменьшением . - степени неполноты тахограммы. / показывает, во сколько раз максимальная скорость движения подъемной системы больще средней скорости. В рассматриваемом случае, при тяжелом хвостовом канате, подъемная система движется по гармоническому закону (фиг. 3) и степень неполноты тахограммы ,57. Общий коэфициент полезного действия fi рудничной подъемной установки, оборудованной асинхронным двигателем, пропорционален коэфициенту % полезного действия асинхронного двигателя и коэфициенту rjg полезного действия зубчатых передач и обратно пропорционален грузовому коэфициенту k и степени . неполноты тахограммы. В данном слечае - 1,57 и общий коэфициент полезного действия рудничной подъемной установки при Пд 0,9, ,92, и А 1,2 для подъема с неопрокидными клетями
,44.
Наличие хвостового каната, подвешенного к подъемным сосудам, представляет значительные неудобства при скиповом подъеме, так как в этом случае петля хвостового каната затрудняет очистку нижних полков у горизонта рудничного двора, где собирают
росыпающийся при загрузке скиа материал.
Настоящее изобретение устраяет все указанные дефекты слеующим образом.
Для повыщения общего коэфинента полезного действия рудичной подъемной установки, обоудованной асинхронным двигатеем, нужно заставить работать подъемную мащину по тахограмме с малым значением степени X неполноты. Степень неполноты тахограммы можно уменьшить, если осуществить в эксплоатации не двухпериодную, а трехпериодную тахограмму (фиг. 6), причем степень ). неполноты трехпериодной тахограммы будет уменьщаться с увеличением абсолютных значений начального ускорения % в период пуска и конечного ускорения й в период останова.
Легко убедиться, что режим эксплоатации рудничной подъемной мащины, с постоянным моментом вращения, при соблюдении трехпериодной тахограммы и наличии тяжелого хвостового каната, можно обеспечить, если подвещивать хвостовой канат с разным весом на отдельных участках (фиг. 4). На участках аЬ погонный вес каната - д кг/м, на участке bb - р KZJM, погонный вес головногэ каната также равен р KZJM. При наличии такого тяжелого хвостового каната с разным весом на отдельных участках диаграмма движущих сил на ободе барабана, при неопрокидных клетях, будет иметь вид, показанный на фиг. 5, Тахограмма этого подъема показана на фиг. 6 (в периоды пуска и останова скорость изменяется по закону синуса), диаграмма ускорений- на фиг. 7, диаграмма мощности - на фиг. 8. Эти рабочие диаграммы отвечают наиболее соверщенному режиму работы подъемной мащины.
Выбирая численное значение разности Д погонных весов на отдельных участках хвостового каната (Д 9-Р) можно получить любую желательную величину ускорений uj и Дд (фиг. 7), т. е. любое значение степени неполноты тахограммы
. oiax Л- (здесь Н-полная высота подъема. Г-продолжительность одного подъема); конечно, при этом нужно также установить длину участков аЬ и bb (фиг. 4) уравновешивающего каната; длина участка аЬ равна fi- - h,,, где AI - линейное перемещение подъемной системы в период пуска, As - длина петли хвостового каната (фиг, 4). Ясно, что линейное перемещение подъемной системы в период останова h h. Кроме упоминавшихся обозначений под т на фиг; 5 подразумевается сумма всех приведенных к ободу барабана масс подъемной системы. Идея подвески такого хвостового каната с разным весом на отдельных участках была впервые высказана автором настоящего изобретения в его статье в журнале „Инженерный работник, .V2 3 -1926 г. в виде примечания к стр. 16.
Однако для получения приемле:;bix численных значений степени неполноты тахограммы, обеспечивающих высокий общийкоэфициент полезного действия рудничной подъемной установки, нужно принимать очень большую величину разности погонных весов каната q - р.
Из схемы, показанной на фиг. 4, ясно, что увеличение А сопровождается увеличением размеров головного каната и барабана. Поэтому применение такого тяжелого хвостового каната дает совершенно неэкономичную подъемную установку. Итак, в рудничной подъемной установке, сконструированной согласно фиг. 4 и описанной автором в 1926 г., коэфициент полезного действия повышается по сравнению с рассмотренным выще гармоническим подъемом. Однако, при этом сохраняются все остальные отмеченные выше дефекты, причем дефекты, помеченные в пп. 1 и 2, еще усугубляются, если не считать уменьшения лишь численного значения эффективного усилия, в виду наличия трехпериодной тахограммы.
Для того, чтобы улучшить эту систему динамического уравновешивания подъемника, необходимо уменьшить диаметр головного каната, который при подвеске тяжелого нижнего или хвостового уравновешиваюшего каната, как было указано выше, возрастает.
Согласно изобретению, это достигнуто тем, что вместо нижнего уравновешивающего каната с разным весом на отдельных участках, применен сам по себе известный верхний уравновешивающий канат, однако последний выполнен с разным весом на отдельных участках.
Под термином нижний уравновешивающий канат имеется в виду канат, который, будучи прикреплен к кабине снизу, всегда воздействует на кабину в сторону ее опускания.
Под термином верхний уравновешивающий канат подразумевается канат, который, будучи прикреплен к кабине сверху, например, через посредство вспомогательного каната, перекинутого через уравнительный блок, воздействует на кабину в сторону ее подъема.
Верхний уравновешивающий канат (фиг. 9) разгружает головной канат и, тем самым, при прочих равных условиях уменьшает диаметр головного каната. Из дальнейшего положения явствует, что при конструкции верхнего уравновгщивающего каната, выполненной согласно настоящему изобретению, можно достигнуть полного динамического уравновешивания подъемной системы, при барабанах с постоянным радиусом навивки, устранив все упомянутые дефекты вышеописанных динамически уравновещенных систем подъемов.
Схема предлагаемой подъемной установки показана на фиг. 9. Верхний уравновешивающий канат aba подвешивается на вспомогательных канатах аес. Вспомогательные канаты должны рассчитываться в соответствии с действующими правилами безопасности с пятикратным запасом прочности на нагрузку, равную весу уравновешивающего каната aba; поэтому диаметр и вес вспомогательных канатов аес незначительны. Вспомогательные канаты аес и головные канаты прикрепляются к верху подъемных сосудов в разных точках.
Верхний уравновешивающий канат aba может быть расположен в любом месте ствола (фиг. 10).
Из рассмотрения фиг. 9 ясно, что нагрузка, действующая на головной канат в точке с у нижнего подъемного сосуда, уменьшается на вес уравновешивающего каната aba минус вес вспомогательного каната аес.
Вес верхнего уравновешивающего каната аЬа не должен превышать веса подъемного сосуда плюс вес вспомогательного каната аес.
В предлагаемой конструкции с полным динамическим уравновешиванием подъемной системы вес верхнего уравновешивающего каната aba всегда принимается равным весу подъемного сосуда плюс вес вспомогательного каната аес. Этим обеспечивается наибольший возможный эффект уравновешивания подъемной системы. При этих условиях максимальная нагрузка головного каната в наиболее опасном сечении равна:
а)при расположении подъемного сосуда с полезным грузом внизу - полезному грузу плюс вес головного каната,
б)при расположении подъемного сосуда с полезным грузом вверху - полезному грузу плюс вес подъемного сосуда.
Расчет головного каната ведется по наибольшей из этих нагрузок.
До известных глубин шахт вес головного каната будет меньше веса подъемного сосуда; для этих шахт выбранный указанным способом верхний уравновешивающий канат может обеспечить полное динамическое уравновешивание подъемной системы. При более глубоких шахтах, для получения полного динамического уравновешивзния, пришлось бы искусственно увеличить вес подъемного сосуда и, значит, соответственно увеличить вес верхнего уравновешивающего каната; в этом случае также можно обеспечить полное динамическое уравновешивание подъемной системы, однако при искусственном увеличении веса подъемного сосуда будут несколько увеличиваться диаметры головного каната и барабана подъемной машины; размеры барабана рассматриваемой машины будут все же меньше по сравнению с размерами обычных ныне применяемых подъемных машин.
Выбранный вышеуказанным способом верхний уравновешивающий канат aba (фиг. 9) выполнен с разным весом на отдельных участках и поэтому вся установка, будучи полностью динамически уравновешена, вместе с тем свободна от всех четырех вышеуказанных дефектов, о которых упоминалось при рассмотрении гармонического подъема.
Для того, чтобы обеспечить заданную продолжительность одного подъема, нужно путем специального расчета установить потребную максимальную скорость движения и линейное перемещение подъемной системы в периоды пуска А останова 3 1 и установившегося движения hz.
После этого нужно установить вес разных участков верхнего уравновешивающего каната aba (фиг. 9).
На участке bb (фиг. 9) длиной hz, соответствующем периоду установившегося движения, погонный вес верхнего уравновешивающего каната должен быть равным р-{-2р кг, где р - погонный вес головного каната, р - погонный вес вспомогательного каната ас.
На участках аЬ длиной Aj -f- или /t -j-As, где hs - высота петли хвостового каната, соответствующих периодам пуска и останова погонный вес рассматриваемого каната будет q кг; численное значение д может быть легко установлено, поскольку известен общий вес верхнего уравновешивающего каната aba и вес его участка bb, соответствующего периоду установившегося движения.
Рабочие диаграммы рассматриваемо ч подъемной установки будут иметь вид, показанный на фиг, 5, 6, 7 и 8.
Предложенный новый тип подъемной установки имеет преимущества перед обычными подъемными установками, поскольку в данном случае достигается полное динамическое уравновешивание, при высоком общем коэфициенте полезного действия подъемной системы, и уменьшаются габариты подъемной машины по сравнению с известными до сих пор динамически уравновешенными системами.
Подъемная установка, показанная на фиг. 9, может обслуживать одновременно двумя подъемными сосудами лишь один рабочий горизонт. Если подъемная установка должна одновременно обслуживать двумя подъемными сосудами несколько рабочих горизонтов, можно, сохранив ту же идею подвески верхнего уравновешивающего каната с разным весом на отдельных участках, выполнить ее по схеме, показанной на фиг. 11.
Ко всему вышеизложенному нужно добавить, что применение конструктивных схем по фиг. 9 и 11 к существующим рудничным подъемным установкам может дать значительное увеличение их производительности и общего коэфициента полезного действия.
Предмет ивобретения.
1. Рудничная подъемная установка с постоянным радиусом навивки и верхним уравновешивающим канатом, отличающаяся тем, что, в целях полного динамического уравновешивания подъемной системы при трехпериодной тахограмме, верхний уравновешивающий канат выполнен с разным весом на отдельных участках.
2. Форма выполнения установки по п. 1, отличающаяся тем,
что распределение веса на верхнем уравновешивающем канате выполнено таким образом, что вес подъемного сосуда при нижнем его положении вместе с весом соединенной с ним ветви каната равен весу смежной ветви того же каната, являющейся продолжением первой ветви.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамически или статически уравновешенная рудничная подъемная установка | 1940 |
|
SU60163A1 |
| ШАХТНАЯ ОДНОКАНАТНАЯ ПОДЪЕМНАЯ УСТАНОВКА | 2011 |
|
RU2480395C2 |
| ПОДЪЕМНАЯ УСТАНОВКА | 2016 |
|
RU2634602C1 |
| Шахтная подъемная установка | 1990 |
|
SU1791318A1 |
| РУДНИЧНАЯ СКИПОВАЯ ПОДЪЕМНАЯ УСТАНОВКА | 2011 |
|
RU2486126C2 |
| Многоканатная шахтная подъемная установка | 1982 |
|
SU1062166A1 |
| Устройство для опрокидывания и разгрузки подъемных сосудов | 1952 |
|
SU98475A1 |
| НАКЛОННАЯ ПОДЪЕМНАЯ УСТАНОВКА | 2013 |
|
RU2537930C1 |
| Шахтная подъемная установка | 1979 |
|
SU1049403A1 |
| ГИБКИЙ ТЯГОВЫЙ ОРГАН РУДНИЧНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 2006 |
|
RU2319013C1 |

фиг
ф И г: d
I/max-А-.i5
FKS LD и Г. 2
...ггттШ
Г- к Икгр Сопл
фиг4
tee к
-А
Гкг Ср И Г 5 .
Umcex СрИГ. 7
О/
In
Оз -fl2А
-н
иг. В
CD
фигЬ
Рк§
Ртаз:
сех (
-t2 7
ЮигО
.d
К-гУ
фиг:
os.ti«f: :
фиг. И
dd
