I
Изобретение относится к технике управления широтно-импупЬсными преобразователями постоянного тока.
Известный способ управления широтно- импульсным преобразоватепем заключает- ся в том, что изменяют длитеЛЬность ЁКЛЮ ченного СОСТОЯНИЙ силовыд вентилей преобразоватепя в требуемом диапазону при постоянной частоте коммутации п 2 J. Однако при таком способе упр ления широтно импульсным преобразователем вагона метрополитена в контактном рельсе возникают частоты, которые оказывают мешающее воздействие на работу систем безопасности двжения, работающих в зоне частот 7 5-27 5riu
Способ управления широтно-импульсным преобразователем, состоящий в том, -что дискретно изменяют длительность включеннго состояния силовых вентилей.преобразователя при постоянной частоте кoм yтaции, наиболее бдизк Й к изобретению по своей супшостн ГЗТ, Однако при таком способе управления широтно-импульсным преобразователем вагона- feтpo в контактном рельсе возникают частоты, вызванные дискретным
характером изменения длительности включенного состояния силовых вентилей, которые входят в зону запрещающих частот, явпяюшихся рабочими для устройств безопасности движения.
Для вагонов метрополитена, учитывая параметры существующего тягового привода число TpvirrepOB в реверсивном и в тактовом счетчиках должно быть .0 8, чтобы устранить влияния не работу устройств безопасности.
При таком числе триггеров в счетчиках устройства для управления требуется весьма большое количество лиодов для дешифраторов, которое для двуЛпупенчатых матриц при четном числе входов f составляет
f
2+2-2
Ъ f при нечетноMfp
f-l
f+l
ЛГ
+ 2-2
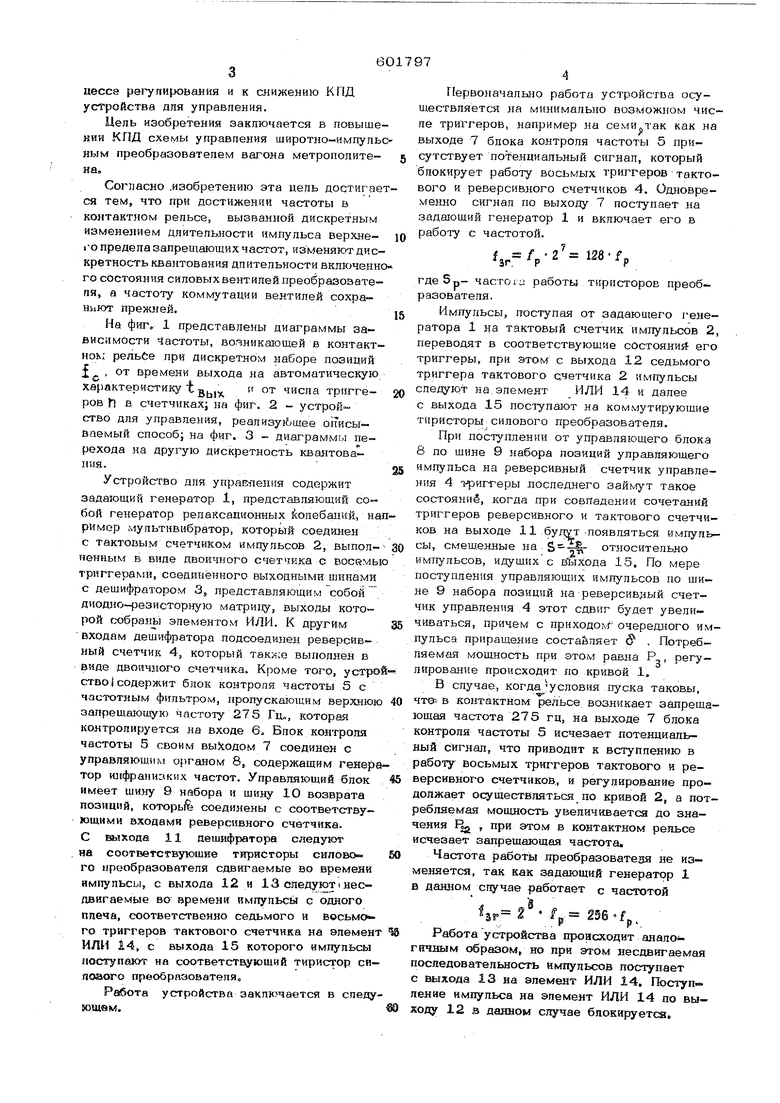
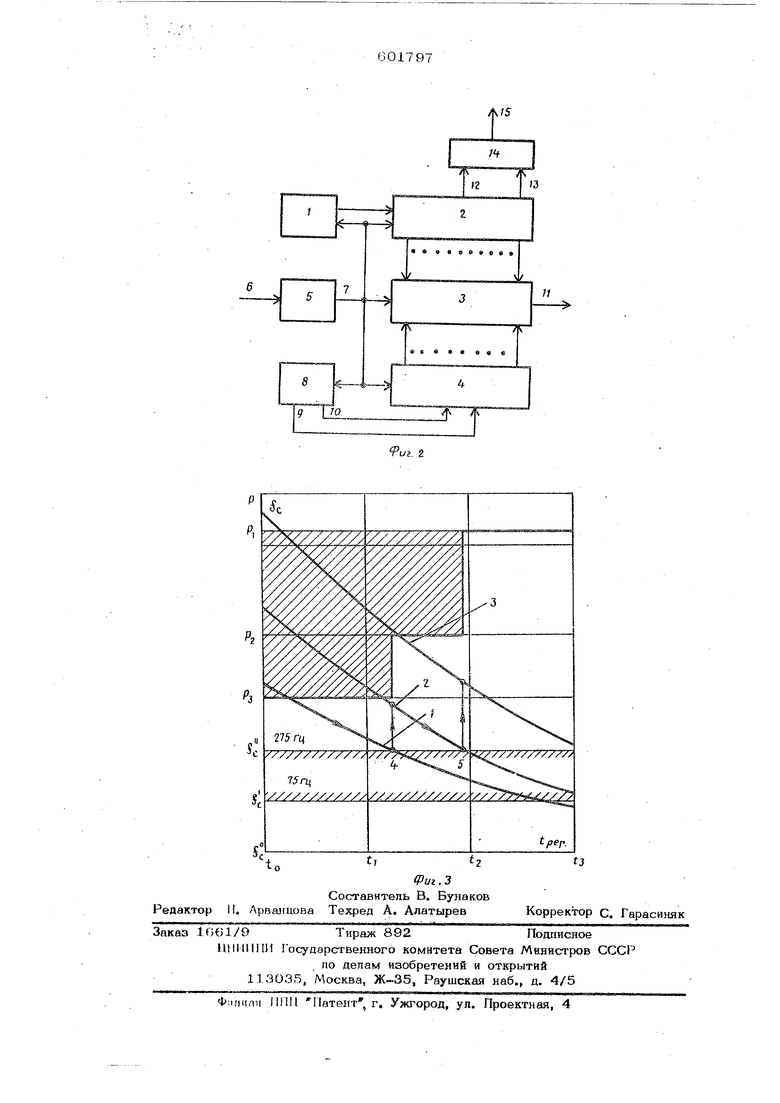
Последнее обстоятельство приводит к завышенному потреблению моцьюсти в про- цессй регупирования и к снижению КПД устройства для управления. Цель изобретения заключается в повыше нии КПД схемы управпения широтно-импупь ным преобразователем вагона метрополитена. Согласно .изобретению эта цель достигае ся тем, что при достижении частоты в контактном репьсе, вызванной дискретным изменением длительности импульса верхнеIo предела запрещающих частот, изменяют дискретность квантования длительности вкпюченн го состояния силовыхвентилей преобразователя, а частоту коммутации вентилей сохраН11ют прежней. На фиг. 1 представлены диаграммы зависимости Частоты, возникающей в контакт нок: рельСе при дискретном наборе позиций f от времени выхода на автоматическую характеристику 13, ( от числа триггеров Г} в счетчиках на фиг. 2 - устройство дпя управления, реализующее описы впемый способ; на фиг. 3 - диаграммы перехода на другую дискретность квантования. Устройство для управления содержит задающий генератор 1, представляющий собой генератор репаксаиионных Колебаний, на ример мультивибратор, который соединен с тактовым счетчиком импульсов 2, выполненным в виде двоичного счетчика с восемь триггерами, соединённого выходными шинами с дещифратором 3, представляющим собой диодно-резисторную матрицу, выходы которой гх)браны элементом ИЛИ, К другим входам дешифратора подсоединен реверсивный счетчик 4, который выполнен в виде двоичного счетчика. Кроме того, уетро ство i содержит блок контроля частоты S с частотным фильтром, пропускающим верхню запрещающую частоту 275 Гц„, которая контролируется на входе 6, Блок контроля частоты 5 своим выходом 7 соединен с управляющим органом 8, содержащим генер тор инфранизких частот. Управляющий блок имеет шину 9 набора и щину Ю возврата позиций, KOTopbfe соединены с соответству- ющнми вхоаамй реверсивного счетчика. С выхода И дешифратора следуют на соответствующие тиристоры сипово- го преобразователя сдвигаемые во времени импульсы, с выхода 12 и 13 следуютi несдвигаемые во времени импульсы с одного ппеча, соответственно седьмого и восьмо го триггеров тактового счетчика на элемен ИЛИ 14, с выхода 15 которого импульсы поступвют на соответствуюшнй тиристор сн поаого преобразователя, Работа устройства заключается в след ющем, Первоначально работа устройства осуществляется на минимально возможном числе триггеров, например на семи.так как на выходе 7 блока контроля частоты 5 присутствует потенциальный сигнал, который блокирует работу восьмых триггеров тактового и реверсивного счетчиков 4, Одновременно сигнал по выходу 7 поступает на задающий генератор 1 и включает его в работу с частотой. 2 m-f. f 3, /р где Sp- часто г; работы тиристоров преоб- разователя. Импульсы, поступая от задаюи его генератора 1 на тактовый счетчик импульсов 2, переводят в соответствующие состояний его триггеры, при этом с выхода 12 седьмого триггера тактового счетчика 2 импульсы следуют на,элемент ИЛИ 14 и далее с выхода 15 поступают на коммутирующие тиристоры силового преобразователя. При поступлении от управляющего блока 8 по щине 9 набора позиций управляющего импульса на реверсивный счетчик управления 4 триггеры последнего займут такое состояние, когда при совпадении сочетаний триггеров реверсивного и тактового счетчиков на выходе 11 будут -появляться импульсы, смещенные на S--5 относительно импульсов, идущихс выхода 15, По мере поступления управляющих импульсов по щи- не 9 набора позиций на реверсивдый счетчик управления 4 этот сдвиг будет увели.чиваться, причем с приходом очередного импульса приращение составляет & . Потребляемая мощность при этом равна Р,,, регу- HHpoBajiHe происходит по .кривой 1. В случае, когдаусловия пуска таковы, ЧТ&- в контактном рельсе возникает запрещающая частота 275 гц, на выходе 7 блока контроля частоты 5 исчезает потенциальный сигнал, что приводит к вступлению в работу восьмых триггеров тактового и реверсивного счетчиков., и регулирование продолжает осуществляться по кривой 2, а потребляемая мощность увеличивается до значения Rg , при этом в контактном рельсе исчезает запрещающая частота. Частота работь лреобразоватеая не изменяется, так как задающий генератор 1 в данном случае работает с частотой 256«/р, Работа устройства происходит аяало- гйчшлм образом, но при этом несдвигаемая последовательность импульсов поступает с выхода 13 на элемент ИЛИ 14. Поступление импульса на элемент ИЛИ 14 по выходу 12 S данном случае блокируется. CflBHraefyfaH последовательность импупьсов при этом продопжает поступать по выходу 11. Таким образом, при осуществпении дискретного управления тиристорными преобра зоватепями вагонов метро с автоматическим регулятором скорости по описанному выше способу предоставляется возможность снизить потребляемую устройством для управления мощность и благодаря этому повысит КПД, снизить мощность источника питания, его объем и массу. Формупа изобретения Способ управления широтно-импульсным преобразователем вагона метрополитена с автоматическим регулятором скорости, имеющим зону запрещающих частот с верхним и нижним пределами, состоящий в том, что дискретно изменяют длительность включенного состояния силовых вентилей преобр зователя при постоянной частоте коммутаци
т 8
320
tg,
/)f отличающийся тем, что, с целью повышения КПД схемы управления при достижении частоты в контактном рельсе, вызванной дискретным изменением дпительности импульса верхнего предела запрещающих частот, изменяют дискретность кваптойанчя длительности включенного состояния силовых вентилей преобразоватепя, а частоту коммута71ии вентилей сохраняют прежней. Источники информации, пршштые во внимание при экспертще: 1.Бирзниеке ЛГВ. Полупроводники и их применение в электротехнике. Рига, АН Латвийской ССР,-1964, с. 79. 2.Бирзннекс Л, В. Импульсные преобрйзователи ностояннрго тока. М,,Энергия 1974, с. 18. . 3 Г. Мо Чйлйктш. Вопросы управления тиристорами щиротно-импуньсяых 1феобразователей электроподвижного состава. Труды Днепропетровского института инженеров железнодорожного транспорта, вып. 106, 1971,с. 65, 68, 69.
280
17/7 717ПЩГПГПГГГ1ТПШЩ
Z75ru,
7 8
l S 6
9 Ю
fi-7 X
777/77/7/777777
ZOO
160
fi-6 /
20
шм
fl
I:
С
.П f
ULIMJiUUJlihllUlLlLL
igi
dJT