где d - расстояние между приемными гидрофонами;
атах -т максимально допустимый угол крена плавучей буровой установки;
п - коэффициент пропорциональности, равный 2 или 4;
Ahc - участок стакана, соответствующий мертвой зоне приема ультразвуковых сигналов, величина которого определяется из условия Ah, R-C-r n при ,
где С - скорость звука в жидкости стаканов;
Гимп- длительность зондирующих ультразвуковых импульсов.
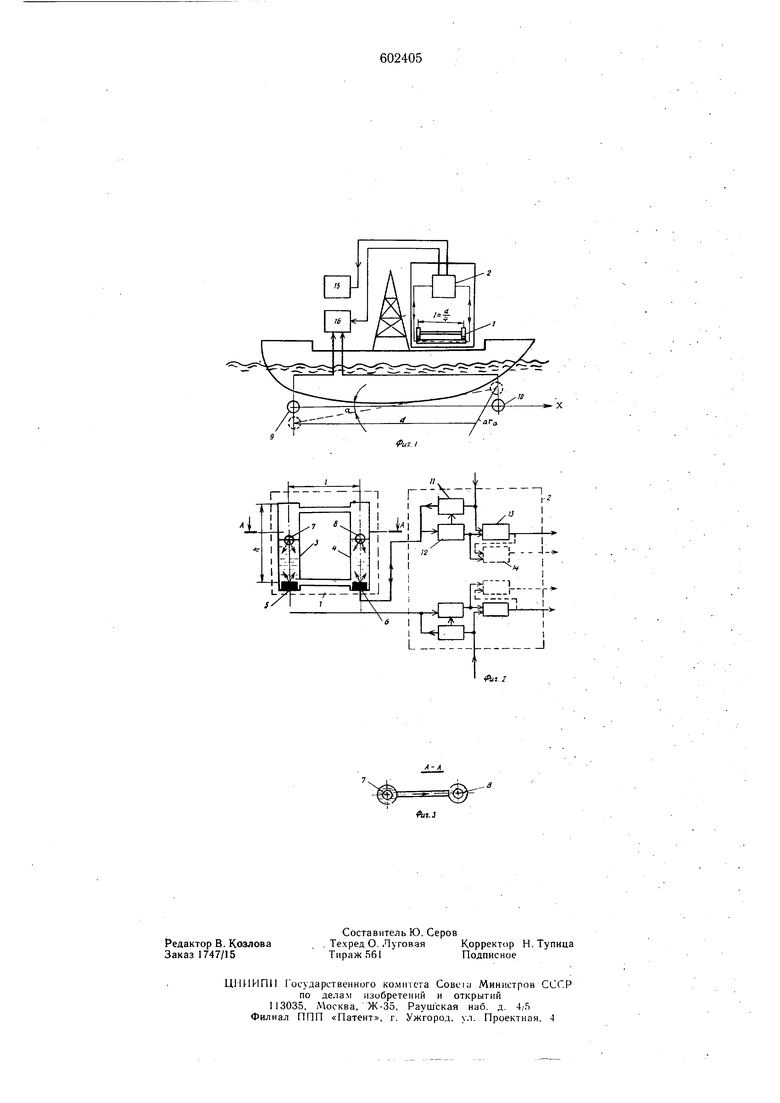
Ультразвуковая линия задержки размещается в любой точке плавучей буровой установки параллельно вертикальной плоскости установки приемных гидрофонов 9 и 10.
Электронный блок 2 устройства состоит из узлов, каждый из которых включает ждущий блокинг-генератор 11, приемник 12, триггеры 13 и 14.
Вход каждого из пьезопреобразователей 5 и 6 соединен с выходом ждущего блокинг-генератора 11 и входом приемника 12, выход приемника 12 соединен со вторыми входами последовательно соединенных триггеров 13 и 14, при этом их выходы соединены с блоком 15 измерения и регистрации, а первый вход одного из триггеров 13 и вход блокинг-генератора 11 соединены с блоком 16 обработки сигналов.
Компенсатор влияния крена акустической системы позиционирования плавучей буровой установки работает следующим образом.
Принятые гидрофонами 9 и 10 ультразвуковые сигналы от акустического маяка, размещаемого на дне моря, после блока 16 обработки сигналов поступают на вход блока 2 компенсатора влияния крена.
Работа устройства при использовании первой половины (одного стакана) линии 1 задержки осуществляется следующим образом.
Импульс с выхода блока 16 обработки сигналов запускает блокинг-генератор 11, формирующий зондирующий импульс, который возбуждает пьезопреобразователь 6, запускает триггер 13 и запирает приемник 12. Возникающие при этом ультразвуковые колебания от пьезопреобразователя 6 распространяются по жидкостному волноводу и после отражения от рефлектора 8 принимаются пьезопреобразователем, работающим теперь в режиме приема. Принятый импульс после усиления его приемником 12 поступает на второй вход триггера 13 и опрокидывает его. При этом на его выходе появляется импульс, который поступает на вход блока 15 измерения и регистрации (если
I где 1 - расстояние между цилиндрическими стаканами), либо на первый вход триггера 14, на второй вход которого поступает вторично отраженный сигнал с выхода приемника 12. В этом случае момент появления импульса с выхода триггера 14 соответствует
1 -4--. Работа при использовании второй половины ультразвуковой линии задержки осуществляется аналогичным образом.
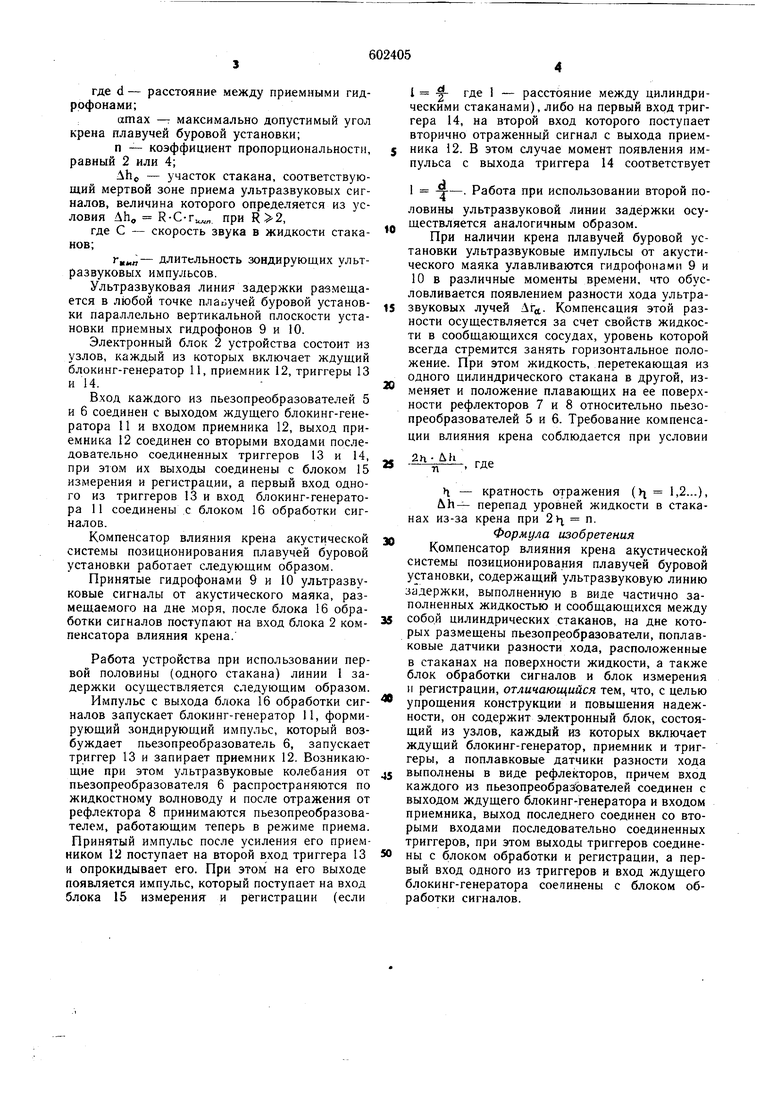
При наличии крена плавучей буровой установки ультразвуковые импульсы от акустического маяка улавливаются гидрофонами 9 и 10 в различные моменты времени, что обусловливается появлением разности хода ультразвуковых лучей Afjt. Компенсация этой разности осуществляется за счет свойств жидкости в сообщающихся сосудах, уровень которой всегда стремится занять горизонтальное положение. При этом жидкость, перетекающая из одного цилиндрического стакана в другой, изменяет и положение плавающих на ее поверхности рефлекторов 7 и 8 относительно пьезопреобразователей 5 и 6. Требование компенсации влияния крена соблюдается при условии
2п- ЛИ
, где
п
г - кратность отражения () 1,2...), перепад уровней жидкости в стаканах из-за крена при 2vi п.
Формула изобретения Компенсатор влияния крена акустической системы позиционирования плавучей буровой установки, содержащий ультразвуковую линию задержки, выполненную в виде частично заполненных жидкостью и сообщающихся между собой цилиндрических стаканов, на дне которых размещены пьезопреобразователи, поплавковые датчики разности хода, расположенные в стаканах на поверхности жидкости, а также блок обработки сигналов и блок измерения и регистрации, отличающийся тем, что, с целью упрощения конструкции и повыщения надежности, он содержит электронный блок, состоящий из узлов, каждый из которых включает ждущий блокинг-генератор, приемник и триггеры, а поплавковые датчики разности хода выполнены в виде рефлекторов, причем вход каждого из пьезопреобразЪвателей соединен с выходом ждущего блокинг-генератора и входом приемника, выход последнего соединен со вторыми входами последовательно соединенных триггеров, при этом выходы триггеров соединены с блоком обработки и регистрации, а первый вход одного из триггеров и вход ждущего блокинг-генератора соединены с блоком обработки сигналов.
fu. I
J
Риг. г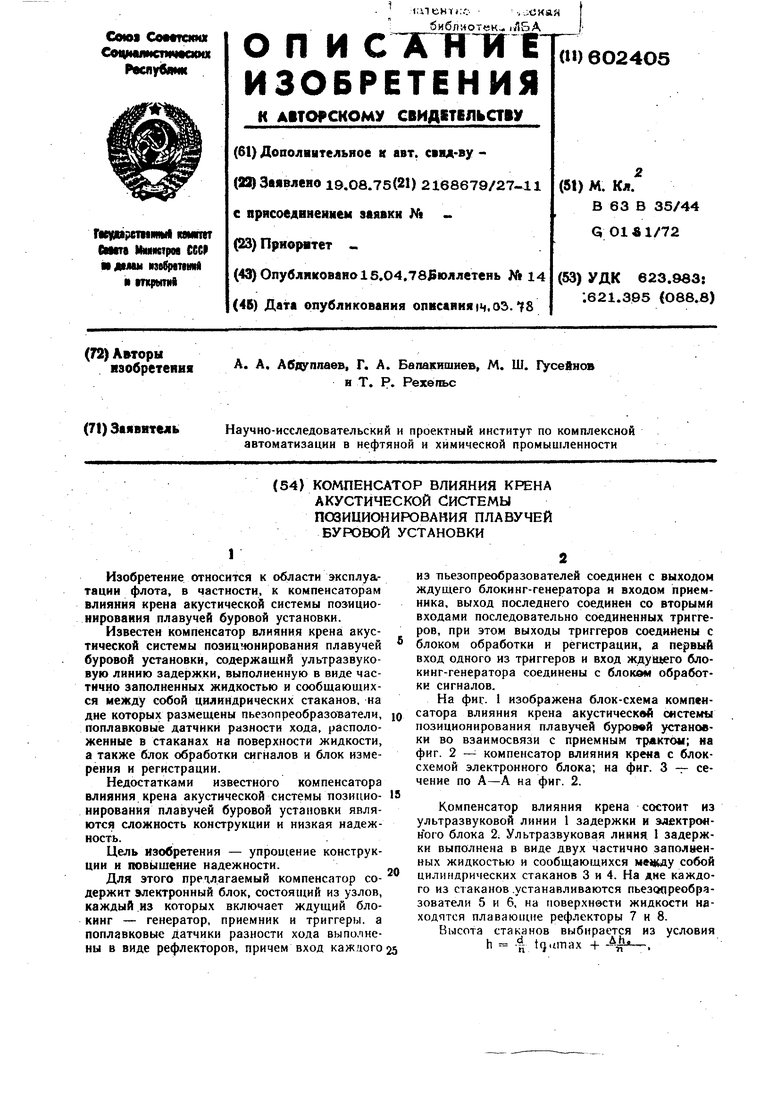
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустическая система позиционирования плавучей буровой установки | 1974 |
|
SU514944A1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНОЕ ГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО СУДНА ОТНОСИТЕЛЬНО ЗАДАННОГО ФАРВАТЕРА | 2011 |
|
RU2470317C1 |
| Ультразвуковой расходомер | 1979 |
|
SU853397A1 |
| Ультразвуковой частотно-временной расходомер | 1978 |
|
SU769337A1 |
| Ультразвуковой уровнемер | 1990 |
|
SU1767354A1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| Система управления положением судна в доке | 1978 |
|
SU750443A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ВЕЛИЧИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093786C1 |
| Ультразвуковой расходомер | 1979 |
|
SU787899A1 |