Изобретение относится к области гидроакустических навигационных систем и может быть использовано для навигационного обеспечения подводных аппаратов повышенной дальности действия, например, работающих в ледовых условиях, затрудняющих доступ к ним обеспечивающего судна, и также может быть использовано при проведении сейсмических и геологоразведочных работ на морском дне.
Известная гидроакустическая синхронная навигационная система дальнего действия содержит донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа, размещенные на объекте навигации синхронизатор, М канальный приемник (М+1) измерителей времени распространения акустических сигналов, M·N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, М блоков выбора максимального значения дистанций, вычислитель координат объекта навигации, передатчик акустического сигнала частоты запроса, приемник синхронного дальномера-пеленгатора с акустическим входом для акустического сигнала частоты запроса f0. На объекте навигации размещены также (М+1) измеритель времени распространения, (М+1) блок преобразования временных интервалов в дистанции, (М+1) блок выбора максимального значения дистанции, измеритель пеленга и угла места. На обеспечивающем судне размещены второй синхронизатор, синхронизированный с первым, второй М канальный приемник с акустическим входом для ответных сигналов гидроакустических приемоответчиков, М модуляторов, М генераторов рабочих частот ответа и передатчик, выполненный М+1-канальным ([1] патент RU №2084923).
Недостатком такой системы является большая погрешность определения координат, связанная с изменчивостью скорости звука в морской среде.
Известная гидроакустическая синхронная дальномерная навигационная система содержит донную навигационную базу из М гидроакустических приемников с различными частотами ответа, размещенных на объекте навигации, гидроакустический передатчик с частотой опроса, генератор синхроимпульсов, М-канальный приемник с акустическим входом для ответных сигналов, М измерителей времени распространения гидроакустических сигналов до приемоответчика, работающего на частоте этого канала и обратно, M×N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий и вычислитель координат объекта навигации. На объекте навигации размещены также шестиэлементный акустический приемник с акустическим входом для приема ответных сигналов, элементы которого образуют три взаимно ортогональные пары гидрофонов, разнесенных на расстояние, меньшее длины волны, второй М-канальный приемник, каждый канал которого содержит три пары усилителей, М измерителей разности фаз, М вычислителей дистанции и угла скольжения и блок задания инвариантной скорости. М блоков выбора луча ([2] патент RU №2084924).
Недостатком такой системы является также большая погрешность определения координат, связанная с изменчивостью скорости звука в морской среде.
Известная гидроакустическая синхронная дальномерная навигационная система дальнего действия содержит донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации генератор синхроимпульсов, акустический передатчик с частотой опроса fo, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник для приема ответных сигналов с частотами fm, М измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала, и обратно, первые входы которых соединены с выходами М-канального приемника, а вторые входы соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, М блоков выбора максимального значения дистанции, входы которых соединены с выходами N блоков преобразования временных интервалов в дистанции данного канала, и вычислитель координат объекта навигации, первый вход которого соединен с выходами блоков выбора максимального значения дистанции всех М каналов. Кроме того, в состав гидроакустической синхронной дальномерной навигационной системы введены вторая донная навигационная база из М гидроакустических маяков-пингеров с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М маяками-ответчиками, содержащих М синхронно работающих генераторов синхроимпульсов, М передатчиков с различными рабочими частотами Fm, входы которых соединены с выходами генераторов синхроимпульсов, М гидроакустических излучателей с рабочими частотами Fm, входы которых соединены с выходами передатчиков с соответствующими рабочими частотами, размещенные на объекте навигации второй генератор синхроимпульсов, работающий синхронно с генераторами синхроимпульсов маяков-пингеров, первый выход которого используется для синхронизации М синхронно работающих генераторов синхроимпульсов гидроакустических маяков-пингеров перед их установкой на дно, буксируемая приемная акустическая антенна, второй М-канальный приемник для приема акустических сигналов маяков-пингеров, вход которого соединен с выходом буксируемой приемной акустической антенны, М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, первые входы которых соединены с выходами второго М-канального приемника, а вторые входы соединены с вторым выходом второго генератора синхроимпульсов, дополнительные М блоков преобразования временных интервалов в дистанции, входы которых соединены с выходами М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, а выходы соединены с вторыми входами вычислителя координат объекта навигации. М гидроакустических излучателей маяков-пингеров и буксируемая приемная акустическая антенна расположены вблизи морского дна на расстоянии не более длины волны на рабочих частотах Fm. Дополнительные М блоков преобразования временных интервалов в дистанции вычисляют искомые дистанции rm через измеренные времена распространения tm. Достигаемым техническим результатом является обеспечение определения координат объекта навигации на малых и больших расстояниях с минимальной погрешностью ([3] патент RU №2289149).
Однако, как и в известных устройствах, недостатком данной системы является сравнительно большая погрешность определения координат, связанная с изменчивостью скорости звука в морской среде и рельефом морского дна.
Известная гидроакустическая навигационная система (ГНС) содержит размещенные на дне акватории гидроакустические маяки-ответчики с известными координатами, а также установленную на борту судна приемоизлучающую и обрабатывающую результаты измерений аппаратуру, отличается тем, что в составе судовой приемоизлучающей аппаратуры передающий блок выполнен в виде передатчика командного сообщения (ПКС) для передачи маякам-ответчикам командного сообщения с использованием время-импульсной модуляции на частоте запроса, а каждый маяк-ответчик дополнительно включает устройство автономного управления для исполнения командного сообщения, переданного ПКС с судна луча ([4] патент RU №34020 U).
Однако, как и в известных устройствах, недостатком данной системы является сравнительно большая погрешность определения координат, связанная с изменчивостью скорости звука в морской среде и рельефом морского дна.
Известная гидроакустическая синхронная дальномерная навигационная система содержит донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm(m=1-M), размещенный на объекте навигации гидроакустический передатчик с частотой опроса fo, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник с акустическим входом для ответных сигналов, выполненный M·N-канальным по числу M·N рабочих частот ответа fmn, M измерителей времени распространения гидроакустических сигналов от объекта навигации до приемоответчика, работающего на частоте этого канала и обратно, выполненный M·N-канальным, M·N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, и вычислитель координат объекта навигации, на гидроакустических приемоответчиках размещены М идентичных вертикально ориентированных приемных антенн, каждая из которых состоит из М пар противофазно возбуждаемых групп по 2N+1 гидрофонов, расстояние между которыми равно половине длины волны на частоте опроса fo. Размещенные на гидроакустических приемоответчиках акустические передатчики выполнены N-частотными с частотами ответа fmn. На объекте навигации размещена вертикально ориентированная приемная антенна, состоящая из М пар противофазно возбуждаемых групп по 2N-1 гидрофонов, расстояние между которыми равно половине длины волны на верхней частоте fmn рабочего диапазона частот. Технический результат заключается в уменьшении погрешности измерения координат ([5] патент RU №2158431).
Недостатком такой системы является большая погрешность определения координат, связанная с изменчивостью скорости звука в морской воде. При этом погрешность определения дистанции и координат существенно возрастает при работе в мелком море, когда временные задержки между отдельными лучами уменьшаются, а сами лучи невозможно идентифицировать и выделить отдельно. Кроме того, алгоритм определения координат, заключающийся в том, что координаты определяют по найденным временам, известному профилю скорости звука на акватории мелкого моря и горизонтам излучения-приема, соответствующим объекту навигации и гидроакустическому приемоответчику, в блоке преобразования временных интервалов в дистанции определяются горизонтальные расстояния, соответствующие первому приближению к искомому расстоянию, и уточненные значения углов скольжения на горизонтах получения-приема, по которым найденные времена снова определяются во втором приближении, не является оптимальным, так как известный профиль звука для акватории является средним значением, полученным по многолетним наблюдениям, а для некоторых акваторий и не установленным, что может вносить дополнительную погрешность в определение координат.
Известна также гидроакустическая синхронная дальномерная навигационная система, которая содержит донную навигационного базу из М гидроакустических приемоответчиков и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, первый М-канальный приемник, М измерителей времени распространения акустических сигналов до приемоответчика и обратно, M×N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, комбинированный акустический приемник на основе трехкомпонентного приемника колебательной скорости и приемника звукового давления с совмещенным фазовым центром, второй М-канальный приемник, каждый канал которого выполнен из четырех субканалов, М вычислителей дистанции и угла скольжения, блок задания инвариантной скорости, М блоков выбора луча, N блоков преобразования временных интервалов в дистанции, вычислитель координат объекта навигации по критерию минимума погрешности, блок определения взаимных пеленгов, М блоков коррекции дистанций, соединенные определенным образом. Техническим результатом является уменьшение погрешности при определении координат объекта навигации ([6] патент RU №2308454).
Недостатком указанной навигационной системы является сравнительно большая неоднозначность выявления наикратчайшей лучевой траектории и в конечном итоге существенная погрешность определения координат.
Известна также гидроакустическая синхронная дальномерная навигационная система дальнего действия, которая содержит донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации генератор синхроимпульсов, акустический передатчик с частотой опроса fo, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник для приема ответных сигналов с частотами fm, М измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала и обратно, первые входы которых соединены с выходами М-канального приемника, а вторые входы соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, М блоков выбора максимального значения дистанции, входы которых соединены с выходами N блоков преобразования временных интервалов в дистанции данного канала, и вычислитель координат объекта навигации, первый вход которого соединен с выходами блоков выбора максимального значения дистанции всех М каналов. Кроме того, в состав гидроакустической синхронной дальномерной навигационной системы введены вторая донная навигационная база из М гидроакустических маяков-пингеров с различными частотами излучения Fm (m=1-М), механически связанных с соответствующими М маяками-ответчиками, содержащих М синхронно работающих генераторов синхроимпульсов, М передатчиков с различными рабочими частотами Fm, входы которых соединены с выходами генераторов синхроимпульсов, М гидроакустических излучателей с рабочими частотами Fm, входы которых соединены с выходами передатчиков с соответствующими рабочими частотами, размещенные на объекте навигации второй генератор синхроимпульсов, работающий синхронно с генераторами синхроимпульсов маяков-пингеров, первый выход которого используется для синхронизации М синхронно работающих генераторов синхроимпульсов гидроакустических маяков-пингеров перед их установкой на дно, буксируемая приемная акустическая антенна, второй М-канальный приемник для приема акустических сигналов маяков-пингеров, вход которого соединен с выходом буксируемой приемной акустической антенны, М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, первые входы которых соединены с выходами второго М-канального приемника, а вторые входы соединены с вторым выходом второго генератора синхроимпульсов, дополнительные М блоков преобразования временных интервалов в дистанции, входы которых соединены с выходами М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, а выходы соединены с вторыми входами вычислителя координат объекта навигации. М гидроакустических излучателей маяков-пингеров и буксируемая приемная акустическая антенна расположены вблизи морского дна на расстоянии не более длины волны на рабочих частотах Fm. Дополнительные М блоков преобразования временных интервалов в дистанции вычисляют искомые дистанции rm через измеренные времена распространения tm. Достигаемым техническим результатом является обеспечение определения координат объекта навигации на малых и больших расстояниях (патент RU №2038127 [7]). Недостатком указанной навигационной системы является относительно малая дальность действия при работе объекта навигации вблизи дна и при использовании донных маяков-ответчиков, которая связана с эффектами рефракции звука вблизи дна, а также наличие механических связей между маяками-пингерами и маяками-ответчиками, что создает дополнительные акустические шумы.
Известна, также гидроакустическая синхронная дальномерная навигационная система ([8] авторское свидетельство SU №713278), которая включает донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, М·N блоков преобразования временных интервалов в дистанции по N в каждом из каналов из М, М блоков выбора максимального значения дистанции из N значений и вычислитель координат объекта навигации, в котором каждый из М каналов введены по числу лучевых траекторий N-1 дополнительных измерителей времени распространения гидроакустических сигналов, N-1 мультивибраторов задержки, N-1 мультивибраторов строб - импульса, N-1 селекторов, причем первые входы N-1 измерителей распространения соединены с выходом генератора синхроимпульсов, вторые входы соединены с первыми выходами соответствующих селекторов, а выходы соединены с М·N входами блока преобразования временных интервалов в дистанции, первый вход каждого из селекторов соединен с выходом соответствующего мультивибратора строб - импульса, второй вход соединен с выходом соответствующего канала приемника, вход первого мультивибратора задержки соединен с выходом соответствующего канала приемника, а выход каждого последующего мультивибратора задержки соединен с вторым выходом соответствующего селектора, в каждый из М каналов введена N(N-1) дополнительных блоков преобразования временных интервалов в дистанции, N-1 дополнительных блоков выбора максимального значения дистанции и усреднитель дистанции, причем входы каждого из N-1 наборов по N блоков преобразования временных интервалов в дистанции соединены с соответствующими выходами N-1 дополнительных измерителей временных интервалов, а выходы соединены с входами N-1 дополнительных блоков выбора максимального значения, выходы всех блоков выбора максимального значения дистанции соединены с N входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислителя координат объекта навигации.
Навигационная база таких систем, предварительно устанавливаемая на дне акватории, как правило, состоит из 12-16 маяков-ответчиков и предварительно калибруется в относительных и в географических координатах (относительная и абсолютная калибровки) с помощью судна обеспечения, оснащенного бортовым комплексом спутниковой и гидроакустической системами навигации. После выработки своего энергетического ресурса маяки-ответчики заменяются, при этом производится новая калибровка донной навигационной базы. Данные системы позволяют обеспечить географическую привязку подводного аппарата в пределах площади до 100 квадратных километров и протяженностью до 50 км.
Использование таких систем для навигации подводных аппаратов требует значительных затрат судового времени, большого количества донных маяков-ответчиков с длительным сроком автономности, ограничивает радиус действия подводного аппарата дальностью связи с донной навигационной базой.
Известен способ навигации подводного объекта посредством гидроакустической навигационной системы, содержащей навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенного на объекте навигации гидроакустического приемопередатчика, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками. Согласно способу гидроакустические приемоответчики размещают на дрейфующих станциях по водной поверхности, навигационные параметры подводного объекта относительно дрейфующей станции или базы из дрейфующих станций определяют в режиме с длинной и/или ультракороткой базой, и/или в комбинированном режиме (длинная + ультракороткая база), и/или в пеленгационной системе, при этом формируют из приемников две навигационные базы с общим центром базы, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы Х направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо ([9] патент RU №2365939). При реализации данного способа, в отличие от известных устройств, на поверхности моря размещается дрейфующая станция, снабженная соответствующей аппаратурой, и которая, находясь в дрейфе, имеет возможность непрерывно принимать сигналы среднеорбитных спутниковых навигационных систем, обрабатывать их с определением высокоточных собственных координат в любой момент времени. В определенный момент времени (по сигналу запроса с подводного объекта или по программе работы дрейфующей станции) эта информация передается по гидроакустическому каналу в виде шумоподобного кодированного сигнала определенного формата на подводный объект. Определив свои координаты относительно дрейфующей станции и имея информацию о географических координатах последней, подводный объект выполняет собственное координирование в географической системе координат.
Устройство, посредством которого реализуется известный способ [9], представляет собой гидроакустическую навигационную систему, которая содержит навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенный на объекте навигации гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками. При этом приемная гидроакустическая антенна состоит из четырех гидрофонов, каждая секция антенны состоит из двух одноканальных и одного многоканального модуля, установленных на линейном несущем кронштейне, выполненном перфорированным, антенны приемников выполнены в форме сферической поверхности и размещены на стальной пластине, по крайней мере, один из М гидроакустических приемоответчиков установлен на водной поверхности. Технический результат - повышение надежности при обеспечении навигации подводных объектов ([10] патент RU №2371738). Недостатком данного устройства является то, что достижение указанного технического результата достигается в благоприятных погодных условиях, что ограничивает широкое применение данного устройства.
Наиболее близким из аналогов является гидроакустическая навигационная система, приведенная в источнике информации [10] - прототип. Известная навигационная система по своей технической сущности, функциональному назначению и достигаемому техническому результату является наиболее близкой к заявляемому изобретению.
Задачей заявляемого технического решения является уменьшение погрешности измерения координат подводного объекта с одновременным снижением трудозатрат при выполнении подводных исследовательских работ.
Поставленная задача решается за счет того, что в гидроакустической навигационной системе, которая содержит навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенный на объекте навигации гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками, приемная гидроакустическая антенна состоит из четырех гидрофонов, установленных на линейном несущем кронштейне, выполненном перфорированным, антенны приемников размещены на стальной пластине, но крайней мере, один из М гидроакустических приемоответчиков установлен на водной поверхности в отличие от прототипа, приемная гидроакустическая антенна включает еще девять гидрофонов при формировании из гидроакустических приемников двух навигационных баз с общим центром базы, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы Х направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо, в отличие от прототипа каждая навигационная база сформирована из семи гидрофонов, один из которых является общим для обеих навигационных баз, на равных расстояниях от которого размещены по два гидрофона, образующие общую центральную часть навигационных баз, состоящую из девяти гидрофонов, при этом крайние гидрофоны каждой из навигационных баз смещены относительно общей центральной части навигационной базы на расстояние, превышающие расстояние между гидрофонами, образующими общую центральную часть навигационных баз, на линейном несущем кронштейне дополнительно установлены датчик определения скорости звука, датчик гидродинамического давления и инерциальный датчик, каждый из М гидроакустических приемоответчиков состоит из подводного и надводного модуля, соединенных кабель-тросом, с датчиками наклона и длины вытравленного троса, надводный модуль снабжен каналом спутниковой радиосвязи.
Отличительные признаки заявляемого технического заключаются в том, что приемная гидроакустическая антенна включает еще девять гидрофонов, при этом формируют из гидроакустических приемников две навигационные базы с общим центром базы, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы Х направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо, каждая навигационная база сформирована из семи гидрофонов, один из которых является общим для обеих навигационных баз, на равных расстояниях от которого размещены по два гидрофона, образующие общую центральную часть навигационных баз, состоящую из девяти гидрофонов, при этом крайние гидрофоны каждой из навигационных баз смещены относительно общей центральной части навигационной базы на расстояние, превышающие расстояние между гидрофонами, образующими общую центральную часть навигационных баз, позволяют существенно уменьшить погрешность определения координат за счет того, что крайние гидрофоны в каждой базе используются для точного измерения компонент направления прихода акустической волны, а центральная часть массива гидрофонов - для исключения ошибки на целое число длин волн при измерении полной разности фаз между крайними гидрофонами. Кроме того, размещение на линейном несущем кронштейне датчика определения скорости звука, датчика гидродинамического давления и инерциального датчика при определении координат подводного объекта позволяет оперативно учитывать изменение таких параметров, как скорость звука в воде, гидродинамическое давление, углы наклона антенны. Выполнение гидроакустических приемоответчиков состоящими из подводного и надводного модулей позволяет реализовать спутниковый радиоканал связи. Наличие на каждом из М гидроакустических приемоответчиков канала спутниковой радиосвязи позволяет корректировать местоположение (координаты) гидроакустических приемоответчиков, которые в процессе их работы могут отличаться от первоначальных установочных координат при воздействии подводных течений и деформациях грунта.
Сущность заявляемого технического решения поясняется чертежами.
Фиг.1. Схема размещения гидрофонов антенны для приема гидроакустических сигналов.
Схема включает стальную пластину 1 с кронштейнами 2, расположенными во взаимно перпендикулярных плоскостях, на которых размещены гидрофоны 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15. Гидрофоны 4, 5, 6, 7, 8, 10, 11, 13 и 14 образуют центральный массив гидрофонов, а гидрофоны 3, 9, 12 и 15 являются крайними гидрофонами, расположенными на концах соответствующих навигационных баз. В месте установки гидрофона 6, на стальной пластине 1, в отдельном корпусе 16, установлены датчики определения скорости звука, гидродинамического давления и инерциальный датчик. Кронштейны 2 закреплены на раме 17. Боковые и тыльные направления гидрофонов заглушены экранами.
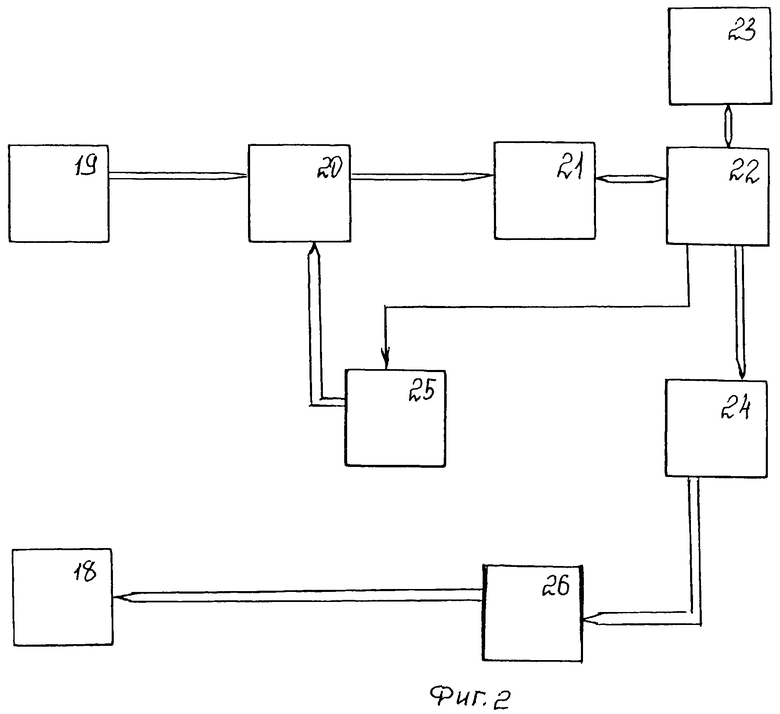
Фиг.2. Блок-схема устройства. Блок-схема включает излучатель 18, сформированный гидрофонами 3, 9, 12 и 15, приемник 19, сформированный из гидрофонов 4, 5, 6, 7, 8, 10, 11, 13, 14 (фиг.1), фильтр-усилитель 20, АЦП 21, контроллер 2, навигационный процессор 23, коммутатор 24, генератор опорных сигналов 25, усилитель мощности 26.
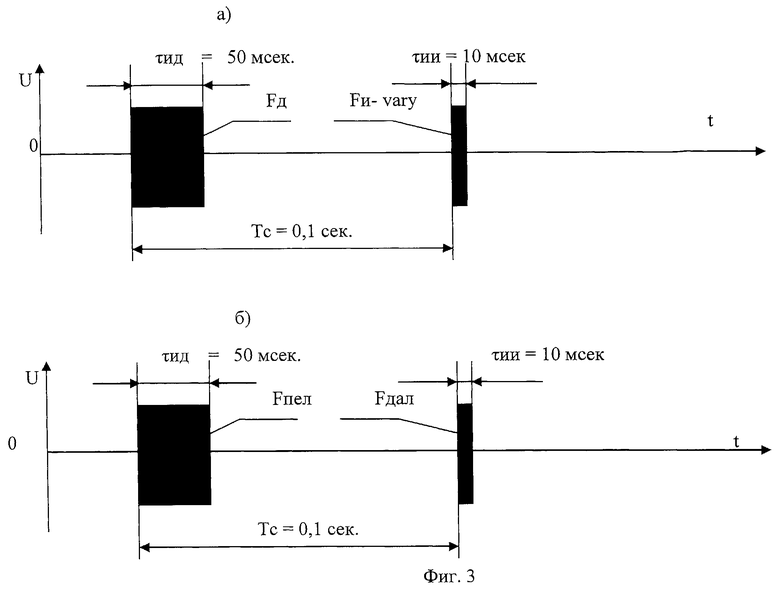
Фиг.3. Временные диаграммы сигналов «ЗАПРОС» (фиг.3а) и «ОТВЕТ» (фиг.3б).
Заявляемое техническое решение предназначено для определения координат подводных объектов относительно различных типов гидроакустических приемоответчиков (маяков-ответчиков) в режиме с ультракороткой базой, включая автономные и буксируемые подводные аппараты, различные подводные научно-исследовательские приборы и станции, устройства и механизмы, обеспечивающие разведку и добычу полезных ископаемых, и может быть использовано при проведении океанографических и геологических исследований, добыче полезных ископаемых и других видах подводных работ в локальных зонах.
Излучатель 18 и приемник 19 образуют общую гидроакустическую приемопередающую антенну, которая предназначена для работы в составе гидроакустической навигационной системы с ультракороткой базой (ГАНС-УКБ). Гидроакустическая приемопередающая антенна предназначена для излучения и приема акустических сигналов для последующего определения положения акустического маяка в определенном диапазоне дальностей относительно географических координат и может быть выполнена в трех вариантах в зависимости от типа подводных аппаратов. Для подводных аппаратов типа «Мир» и «Звук-6» с диапазоном дальностей действия антенн - до 8000 м, подводного аппарата типа «Мезоскан-М» до 3000 м (аппараты типа Мезоскан-М) и для подводных аппаратов типа «Гном» и «Микросаунд» до 500 м соответственно.
В состав гидроакустической приемно-передающей антенны входят многоканальная система приема, усилитель мощности, микроконтроллерный модуль управления и связи.
Гидроакустическая приемопередающая антенна обеспечивает излучение и прием сигналов, формат которых соответствует параметрам одного из маяков-ответчиков типа «МО-Д», «ГМО-6000», «ГМО-2000», «ГМО-200», и обеспечивает эквивалентную угловую точность не хуже 0.03° в режиме дальнего действия и 0.3° в режиме ближнего действия.
Инерциальный датчик представляет собой высокоточный инерциальный датчик типа гирокомпаса для измерения наклонов и курса гидроакустической приемопередающей антенны. В конкретной технической реализации применен датчик типа «U-PHINS» фирмы IXSEA.
Датчик скорости звука представляет собой циклический скоростемер, представляющий собой замкнутое через воду акустическое кольцо синхронизации, образованное двумя акустическими преобразователями, усилителем и импульсным генератором, запускаемым по сигналам с выхода усилителя (1. Гусев М.Н., Яковлев Г.В. Гидроакустические доплеровские лаги // Судостроение за рубежом, 1976, №5, с.53-57. 2. Судовые измерители скорости / А.А.Хребтов, В.Н.Кошкарев и др. - Судостроение, 1978, с.133).
Датчик гидродинамического давления представляет собой датчик, аналогом которого является датчик давления, приведенный в описании к патенту RU №2328757. Каждый из М гидроакустических приемоответчиков состоит из подводного и надводного модулей, соединенных кабель-тросом. Надводный модуль снабжен спутниковым радиоканалом типа «Sea Tooth». Для подъема антенны спутникового радиоканала на поверхность может быть использована, например, морская лебедка типа «Лерок» или положительная плавучесть типа аварийного буя, применяемого на подводных лодках с установленными на них датчиками наклона и длины вытравленного троса.
На маяке-ответчике также установлены приемопередающая гидроакустическая антенна, предназначенная для преобразования акустических сигналов в электрические и преобразования электрических сигналов в акустические, и блок электроники. В состав блока электроники входят:
- приемно-усилительное устройство, предназначенное для приема и усиления сигналов "ЗАПРОС", переданных с подводного объекта по гидроакустическому каналу связи;
- декодер сигнала "ЗАПРОС", который осуществляет декодирование сигнала "ЗАПРОС" и определяет момент прихода сигнала "ЗАПРОС";
- формирователь сигнала "ОТВЕТ", который предназначен для формирования сигнала "ОТВЕТ" после приема сигнала "ЗАПРОС";
- усилитель мощности, предназначенный для усиления до необходимого уровня сигнала "ОТВЕТ" с целью его передачи по гидроакустическому каналу связи.
- блок питания, который обеспечивает электропитанием все электронные узлы блока электроники.
Блок электроники размещен в прочном корпусе, который защищает его от воздействия гидростатического давления.
Донные маяки-приемоответчики устанавливаются по трассе выполнения исследовательских работ посредством подводных объектов, и их количество определяется масштабами проводимых исследований. Предлагаемая конструкция приемопередающей гидроакустической антенны позволяет осуществлять подводную навигацию при наличии двух маяков приемоответчиков. Определение координат места подводного объекта осуществляется аналогично известным способам и устройствам, приведенным в описаниях к патентам RU №2365939 (Способ навигации подводного объекта) и RU №2371738 (Гидроакустическая навигационная система). Навигация подводного объекта относительно донных маяков-ответчиков может осуществляется как в режиме с длинной базой (ДБ), ультракороткой базой (УКБ) так в комбинированном режиме ДБ/УКБ. При этом подводный объект оснащается соответствующими режиму работы гидроакустическими приемопередающими антеннами, навигационным контроллером и программно-математическим обеспечением.
При обеспечении навигации подводного объекта на глубинах более 1 км используют частоты в диапазоне от 8 до 15 кГц, при этом энергетическая дальность связи с маяком-приемоответчиком будет достигать 10-14 км, а погрешность определения координат подводного объекта составит 7-10 м в режиме ДБ и 0,3% от дальности в режиме УКБ и 0,5 градусов в режиме пеленгации. При рабочей глубине менее одного километра целесообразно использовать рабочие частоты в диапазоне 25-35 кГц и работать в режиме УКБ. При этом максимальная дальность связи будет достигать порядка 3 км. Каждый сигнал маяка приемоответчика имеет специальный формат и кодировку и несет в себе информацию о географических координатах, его индивидуальном номере. Наиболее оптимальная дальность связи в режиме УКБ при глубине погружения до 500 м - 1 км. Точность определения координат до 5 м.
Устройство в части обеспечения позиционирования подводного объекта представляет собой гидроакустическую навигационную систему с комбинированной системой гидроакустической навигации с длинной и ультракороткой базой, которая позволяет использовать режим пеленгации и обеспечить решение задачи выхода подводного объекта в точку установки маяка приемоответчика по трассе выполняемых работ. При этом гидроакустическая антенна маяков-приемоответчиков, как и подводного объекта, представляет две имеющие общий центр базы и состоит из такого же количества приемников.
При этом, когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированного маяка приемоответчика в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту, осуществляется режим измерения задержек от двух или нескольких донных маяков-приемоответчиков в режиме длинной базы.
Диапазон рабочих глубин маяков-приемоответчиков от 200 до 6000 м, наклонная дальность действия ГАНС-УКБ составляет от 20 до 8000 м, в зависимости от назначения подводного объекта. Диапазон рабочих частот для дальности связи до 500 м составляет 30-50 кГц, а для дальности связи до 8000 м составляет 7-14 кГц.
Режимы работы маяков приемоответчиков «ЗАПРОС-ОТВЕТ».
В этом режиме принимается сигнал запроса и излучает сигнал ответа. Запрос производится по гидроакустическому каналу связи, запрос адресный. Адрес определяется своей частотой запроса.
Диапазон частот сигнала "ЗАПРОС" - от 7 кГц до 10 кГц. Диапазон частот сигнала "ОТВЕТ" - от 10 кГц до 14 кГц. Формат сигнала "ЗАПРОС" - пачка из двух импульсов, каждый из которых заполнен своей частотой. Частота заполнения первого импульса 8192 Гц. Частота заполнения второго импульса находится в диапазоне от 9 кГц до 10 кГц. Длительность первого импульса 50 мс ±1 мс, второго 10 мс ±0,02 мс. Период следования 100 мс.
Первый импульс выводит маяк из "спящего" режима. По второму импульсу регистрируется время прихода сигнала и определяется адрес маяка. Формат сигнала "ОТВЕТ" - пачка из двух импульсов, каждый из которых заполнен своей частотой. Частота заполнения первого импульса находится в диапазоне от 10 кГц до 11,5 кГц. Частота заполнения второго импульса находится в диапазоне от 11,5 кГц до 14 кГц. Длительность первого импульса 50 мс ±1 мс, второго 10 мс ±0,02 мс мс. Период следования 100 мс.
Первый импульс используется для измерения направления. Второй импульс используется для измерения дальности.
Сигналы "ОТВЕТ" одинаковые для каждого из маяков. Среднеквадратическая погрешность регистрации времени прихода сигнала "ЗАПРОС" по гидроакустическому каналу - 2 мс, при уровне шумового давления в зоне расположения маяка в полосе 1 Гц на частоте 1 кГц не более 0,1 Па. Вероятность пропуска сигнала "ЗАПРОС" при уровне шумового давления 0,1 Па в полосе 1 Гц на частоте 1 кГц, Рпр - 10-4, не более.
Чувствительность приемника не хуже 100 дБ относительно 1 мкПа на расстоянии 1 м. Уровень акустического давления, создаваемый приемоизлучающей антенной в рабочей полосе частот, должен быть не менее 190 дБ относительно 1 мкПа на расстоянии 1 м. Диаграмма направленности приемоизлучающей антенны - однонаправленная. Ширина диаграммы направленности по уровню 0,707 в рабочей полосе частот - ±45° ±5°. Чувствительность на прием на частотах от 7 кГц до 10 кГц - 300 мкВ/Па, не менее. Чувствительность на передачу в диапазоне частот от 10 кГц до 13,5 кГц - 4,5 Па/В, не менее.
Параметры сигнала "ЗАПРОС", передаваемого по гидроакустическому каналу связи (фиг.3а):
- пачка из двух импульсов, заполненных несущими частотами Fд (дежурный) и F и 1 или F и 2 (измерительный);
- длительность первого импульса τид - 50 мс ±1 мс;
- длительность второго импульса τии - 10 мс ±0,02 мс;
- период следования первого и второго импульсов Тс - 0,1 с;
- частота заполнения первого импульса Fд - 8192 Гц;
- частота заполнения второго импульса F и 1 - 8474 Гц;
- частота заполнения второго импульса F и 2 - 8928 Гц.
Параметры сигнала "ОТВЕТ" (фиг.3б):
- пачка из двух импульсов, заполненных несущими частотами Fп (пеленг) и Fдал (дальность);
- длительность первого импульса τид - 50 мс ±1 мс;
- длительность второго импульса τии - 10 мс ±0,02 мс;
- период следования первого и второго импульсов Тс - 0,1 с;
- частота заполнения первого импульса Fпел - 10000 Гц;
- частота заполнения второго импульса Fдал - 10416 Гц.
Акустический запрос производится через усилитель мощности 26 излучателем 18. Ответные сигналы принимаются центральным массивом гидрофонов, производится их усиление, фильтрация, выделение квадратур, оцифровка и обработка посредством навигационного процессора 23. Приемопередающая гидроакустическая антенна снабжена датчиками гидродинамического давления и скорости звука, инерциальным датчиком для определения собственной угловой ориентации, и поступающая с них информация во время каждого цикла приема ответов присоединяется к пакету акустической информации. В дальнейшем при окончательной обработке данных навигационным процессором 23, используя информацию от навигационного приемника GPS, рассчитываются точные географические координаты местоположения подводного объекта.
При этом измеренное время пробега пересчитывается с учетом профиля скорости звука в наклонную дальность, а направление прихода волны на поверхность антенны с учетом наклонов и азимута самой антенны позволяет определить точку, из которой излучение звука было произведено. Измерение времени пробега производится путем анализа формы принятого звукового сигнала, при этом точность измерения времени определяется шириной полосы приемного тракта и отношением сигнал/шум. Определение направления прихода звуковой волны производится путем измерения разности фаз сигналов, принятых разными гидрофонами, с последующим пересчетам разности фаз в геометрические углы с учетом характерной длины волны акустического сигнала и пространственного разнесения приемников. Точность измерения направления при этом определяется дистанцией между приемниками и отношением сигнал/шум. Точность измерения времени пробега или, другими словами, точность определения положения объекта вдоль луча не зависит от расстояния (при достаточно высоком уровне сигнала по сравнению с шумами) и для традиционных систем дальнего действия составляет доли метра. При фиксированном угловом разрешении ошибка измерения положения объекта поперек луча линейно увеличивается с дистанцией и, как правило, характеризуется в процентном отношении к наклонной дальности.
Существуют два способа повышения точности ГАНС-УКБ систем. Это увеличение пространственного разнесения приемников и увеличение отношения сигнал/шум.
Исследование структурных и функциональных схем известных ГАНС-УКБ показало, что практически во всех известных технических решениях используются приемные антенны сравнительно небольших размеров - менее полуметра. Увеличение разнесения гидрофонов до 1-1,5 м позволит пропорционально увеличить угловую точность приемопередающей гидроакустической антенны при фиксированном отношении сигнал/шум.
Увеличение отношения сигнал/шум достигается увеличением мощности сигнала и снижением уровня шума. Как правило, в источниках анализируемых звуковых сигналов для приемных антенн ГАНС-УКБ используются пьезокерамические излучающие элементы, работающие на пределе излучаемой мощности, поэтому единственным способом усиления сигнала является увеличение его энергии за счет увеличения длительности. Увеличение длительности в тональном режиме приводит к снижению точности измерения времени пробега акустической волны и, тем самым, к ухудшению характеристик навигации в целом. Единственным реальным способом увеличения энергии сигнала без ухудшения разрешающей способности системы по дальности является использование сложных сигналов. Однако использование сложных сигналов требует, с одной стороны, значительного повышения производительности процессоров в транспондерах и бортовой антенне, а с другой, сокращает время жизни акустических ответчиков в автономном режиме при фиксированном ресурсе источников питания.
Существует ряд способов снижения уровня акустических помех на приемнике.
Окружающий шум в точке приема имеет сложный частотный и пространственный спектры, и его эффективный уровень может быть снижен за счет ограничения чувствительности приемников в областях, заведомо не содержащих полезной информации. Ограничение чувствительности в частотной области достигается оптимальной фильтрацией сигналов, ограничение чувствительности в пространственной области - пассивным или активным формированием диаграммы направленности. Пассивное формирование достигается применением отражающих и заглушающих элементов в конструкции антенны, которые ослабляют звуковые волны с нежелательных направлений. Такой способ применяется в большинстве известных УКБ систем и является весьма эффективным и относительно дешевым, однако не позволяет максимально сузить пространственный спектр анализируемого сигнала и добиться минимально возможного уровня шума. Активное формирование направленности достигается использованием многоэлементных фазируемых решеток и применяется, например, в системе HIPAP-500 компании Kongsberg. Этот способ формирования диаграммы приема дает наилучшие результаты, однако реализация антенн такого типа является очень сложной и дорогостоящей задачей. В предлагаемом техническом решении увеличение точности навигации подводного объекта достигается за счет пространственного разнесения гидрофонов на максимальное технически допустимое расстояние с формированием диаграммы направленности, близкой к равномерной в активном полупространстве, а боковые и тыльное направления заглушены специальными экранами.
Практическая реализация заявляемого технического решения основана на теоретическом принципе построения предложенной гидроакустической системы подводной навигации с ультракороткой базой.
Разность фаз α сигналов двух точечных приемников (первого и второго) с разнесением d при падении на них плоской волны с длиной λ под углом
-π/2≤φ<π<π/2 к нормали пары при d<λ/2 равна:
где -π/2<α<π/2.
Направление прихода волны (пеленг) определяется формулой:
Отсюда следует, что при наличии погрешности δα измерения разности фаз и ошибки δd в продольном разнесении приемников погрешность δφ определения пеленга составляет:

где δσ=δd / d - относительная ошибка в продольном разнесении приемников.
Погрешность измерения разности фаз δα обусловлена помехами, связанными с отражениями волны от элементов конструкций, шумами океана, шумами судов, подводных аппаратов и механизмов, шумами электронных трактов и т.п. Обозначая через  и
и  векторы сигнала и помехи на приемнике, получаем, что вносимая помехой погрешность ε фазы сигнала равна:
векторы сигнала и помехи на приемнике, получаем, что вносимая помехой погрешность ε фазы сигнала равна:

Отсюда получаем, что среднеквадратичное значение ε составляет:

где q=s/n - отношение сигнал/шум. Погрешность измерения разности фаз сигналов двух приемников очевидно равна:

Среднеквадратичная погрешность определения пеленга с учетом некоррелированности рассматриваемых погрешностей очевидно составляет:

Для повышения точности пеленга можно использовать третий приемник, расположенный на оси с имеющимися и образующий с первым пару с разнесением D>d. Если β+2πn - разность фаз первого и третьего приемников (-π/2<β<π/2, n - целое), то пеленг и его погрешность аналогично вышеизложенному определяются формулами:
 ,
, 
где δs=δD/D - относительная ошибка в продольном разнесении первого и третьего приемников, δD - абсолютная.
Однако при измерении разности фаз целое число периодов n не фиксируется и для его определения используется специальная процедура, заключающаяся в следующем. Величина α умножается на D/d и результат приравнивается к β+2πn: α·(D/d)=β+2πn, откуда определяется ближайшее к целому значению n:

При этом среднеквадратичное отклонение оценки n от истинного значения при D>>d с учетом некоррелированности рассматриваемых погрешностей равно:

Отсюда следует, что максимальное отношение D/d при заданном δnc равно:

Очевидно, что определение значения п по данному алгоритму возможно при условии Δn€[-1,2; 1,2], которое выполняется при |δn|<(1/2)/3=1/6 с 99.7% вероятностью. Следовательно, при обеспечении 99.7% надежности максимально возможное значение δnc равно 1/6. В частности, для калиброванной системы (δσ=0) при q=10 имеем
(D/d)max=7.4. Для некалиброванной системы δσ=0.1 при q=10 и α=π имеем (D/d)max=3.
Для дальнейшего повышения точности пеленга можно использовать четвертый приемник, расположенный на оси с имеющимися и образующий с первым пару с разнесением L>D>d. Если γ+2πm - разность фаз первого и четвертого приемников (-π/2<γ<π/2 m - целое), то пеленг и его погрешность определяются формулами:
 ,
, 
где δl=δL/L - относительная ошибка в продольном разнесении первого и четвертого приемников, δL - абсолютная.
Как и выше, при измерении разности фаз целое число периодов m не фиксируется и для его определения используется специальная процедура, заключающаяся в следующем. Величина β+2πn умножается на L/D и результат приравнивается к γ+2πm: (β+2πn)·(L/D)=γ+2πm, откуда определяется ближайшее к целому значению m:

При этом среднеквадратичное отклонение оценки m от истинного значения при δn=0 и L>>D с учетом некоррелированности рассматриваемых погрешностей равно:

где Δδ=δD/d. Отсюда следует, что максимальное отношение L/D при заданном δmc равно:

Очевидно, что определение значения m по данному алгоритму при δn=0 возможно при условии Δn€[-1,2; 1,2], которое выполняется при |δm|<(1/2)/3=1/6 с 99.7% вероятностью. Следовательно, при обеспечении 99.7% надежности максимально возможное значение δmc равно 1/6. Вероятность определения m с учетом флуктуации n очевидно равна (0.997)2×l00%=99.4%. В частности, для калиброванной системы (δΔ=0) при q=10 имеем (L/D)max=7.4. Для некалиброванной системы с δΔ=0.1 при q=10 и α=π имеем (L/D)max=3. Таким образом, для некалиброванной системы (L/d)max=9.
Заявляемая гидроакустическая навигационная система в новой совокупности существенных признаков является новой, обладает изобретательским уровнем, т.е. она явным образом не следует из уровня техники и по своим характеристикам превосходит известные навигационные системы. Совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом.
В заявляемой гидроакустической навигационной системе повышение точности и надежности определения координат обеспечивается за счет пространственного разнесения гидрофонов на максимальное технически допустимое расстояние с формированием диаграммы направленности, близкой к равномерной в активном пространстве. При этом крайние гидрофоны в каждой линейке используются для точного измерения компонент направления прихода акустической волны, а центральная часть массива гидрофонов - для исключения ошибки на целое число длин волн при измерении полной разности фаз между крайними гидрофонами.
Промышленная применимость заявляемого технического решения обеспечивается применением серийно выпускаемых основных узлов и элементов.
Источники информации
1. Патент RU №2084924.
2. Патент RU №2084923.
3. Патент RU №2289149.
4. Патент RU №34020U.
5. Патент RU №2158431.
6. Патент RU №2308454.
7. Патент RU №203 8127.
8. Авторское свидетельство SU №713278.
9. Патент RU №2365939.
10. Патент RU №2371738.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |
Использование: для навигационного обеспечения подводных аппаратов повышенной дальности действия. Сущность: гидроакустическая навигационная система содержит навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и гидроакустический приемопередатчик. Приемная гидроакустическая антенна состоит из четырех гидрофонов, установленных на линейном несущем кронштейне, выполненном перфорированным, антенны приемников размещены на стальной пластине, по крайней мере один из М гидроакустических приемоответчиков установлен на водной поверхности. Приемная гидроакустическая антенна включает еще девять гидрофонов при формировании из приемников двух навигационных баз с общим центром базы. Они расположены в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы Х направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо. Каждая навигационная база сформирована из семи гидрофонов, один из которых является общим для обеих навигационных баз, на равных расстояниях от которого размещены по два гидрофона, образующие общую центральную часть навигационных баз, состоящую из девяти гидрофонов, при этом крайние гидрофоны каждой из навигационных баз смещены относительно общей центральной части навигационной базы на расстояние, превышающие расстояние между гидрофонами, образующими общую центральную часть навигационных баз, на линейном несущем кронштейне дополнительно установлены датчик определения скорости звука, датчик гидродинамического давления и инерциальный датчик, каждый из М гидроакустических приемоответчиков состоит из подводного и надводного модуля, соединенных кабель-тросом с датчиками наклона и длины вытравленного троса, надводный модуль снабжен каналом спутниковой радиосвязи. Технический результат: уменьшение погрешности измерения координат подводного объекта. 3 ил.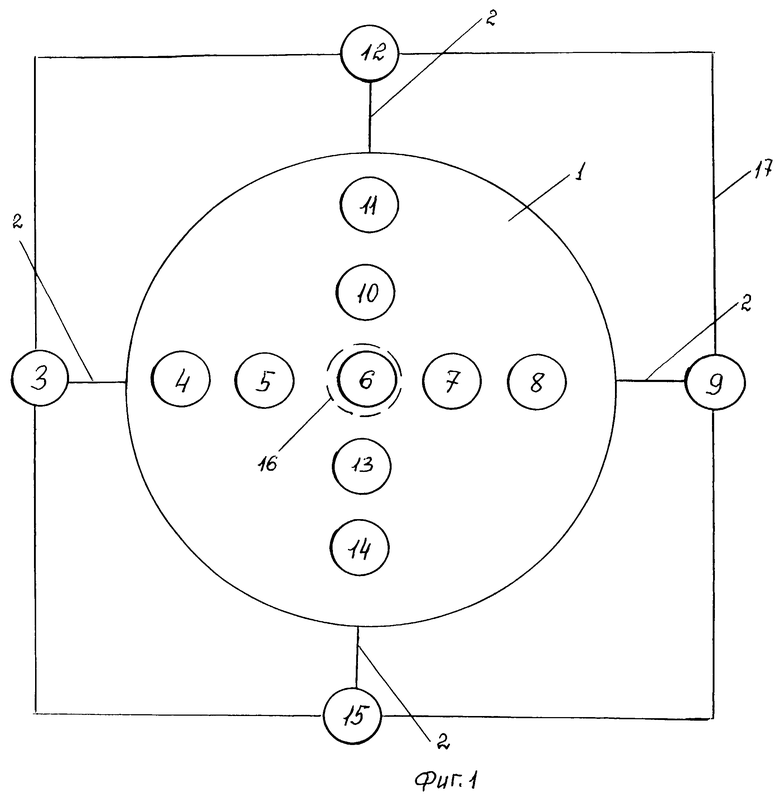
Гидроакустическая навигационная система, содержащая навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенный на объекте навигации гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками, приемная гидроакустическая антенна состоит из четырех гидрофонов, установленных на линейном несущем кронштейне, выполненном перфорированным, антенны приемников размещены на стальной пластине, по крайней мере, один из М гидроакустических приемоответчиков установлен на водной поверхности, отличающаяся тем, что приемная гидроакустичекая антенна включает еще девять гидрофонов при формировании из приемников двух навигационных баз с общим центром базы, располагая их в плоскости, параллельной плоскости палубы подводного объекта, при этом ось одной базы Х направлена вдоль осевой линии подводного объекта, а ось другой базы Y направлена по траверзу вправо, в отличие от прототипа каждая навигационная база сформирована из семи гидрофонов, один из которых является общим для обеих навигационных баз, на равных расстояниях от которого размещены по два гидрофона, образующие общую центральную часть навигационных баз, состоящую из девяти гидрофонов, при этом крайние гидрофоны каждой из навигационных баз смещены относительно общей центральной части навигационной базы на расстояние, превышающее расстояние между гидрофонами, образующими общую центральную часть навигационных баз, на линейном несущем кронштейне дополнительно установлены датчик определения скорости звука, датчик гидродинамического давления и инерциальный датчик, каждый из М гидроакустических приемоответчиков состоит из подводного и надводного модуля, соединенных кабель-тросом с датчиками наклона и длины вытравленного троса, надводный модуль снабжен каналом спутниковой радиосвязи.
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2353949C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1978 |
|
RU713278C |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2308054C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2101730C1 |
| Мощная безинерционная газовая лампа для дальновидения | 1932 |
|
SU34020A1 |
| US 4758997 A, 19.07.1988 | |||
| US 4229809 A, 21.10.1980. | |||

