Предложение относится к гидроакустическим разностно-дальномерным (гиперболическим) навигационным системам и может быть использовано для определения координат судна при его прохождении по заданному фарватеру.
Известно устройство для определения двух декартовых координат объекта (патент RU 2020514, МПК G01S 11/00, 30.09.1994), содержащее три маяка, расположенные в вершинах прямоугольного равнобедренного треугольника, приемник сигналов маяков, блок определения разности времен прихода сигналов от маяков, компаратор, блок определения прогнозируемого начального значения координаты, сумматор, блок вычисления декартовой координаты, блок определения расчетного значения разности дальностей от объектов до маяков, блок вычитания и два масштабирующих блока. Недостаток устройства заключается в его сложности, необходимости проведения большого числа вычислительных операций и, как следствие, в невысоких надежности и быстродействии.
Известна синхронная дальномерная навигационная система для мелкого моря (патент RU 2158431, МПК G01S 15/08, 27.10. 2000), содержащая навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа, размещенный на объекте навигации гидроакустический передатчик, М-канальный приемник, измерители времени распространения гидроакустических сигналов от объекта навигации до приемоответчика, блоки преобразования временных интервалов в дистанции и вычислитель координат объекта навигации. Недостаток системы состоит в необходимости применения большого числа оборудования и его сложности.
Наиболее близкой к предлагаемому устройству является система определения местоположения в море плавучей буровой установки или подводной лодки (патент GB 1162714, МПК G01S 5/18, 27.08.1969). Система содержит импульсный передатчик акустических сигналов, установленный на объекте навигации, четыре донных гидрофона, связанных через приемники акустических сигналов с радиобуями-ответчиками на поверхности воды, четыре бистабильные схемы и аналоговое счетно-решающее устройство для определения координат объекта. Недостатком системы, основанной на дальномерном принципе измерения координат, является необходимость создания, помимо акустических каналов связи, радиоканалов, работающих на нескольких частотах, усложняющих и снижающих надежность системы в целом.
Предлагаемое устройство обеспечивает получение системы координат, близкой к декартовой, что существенно упрощает вычисление координат судна, повышает быстродействие, надежность устройства и сокращает требуемый объем оборудования.
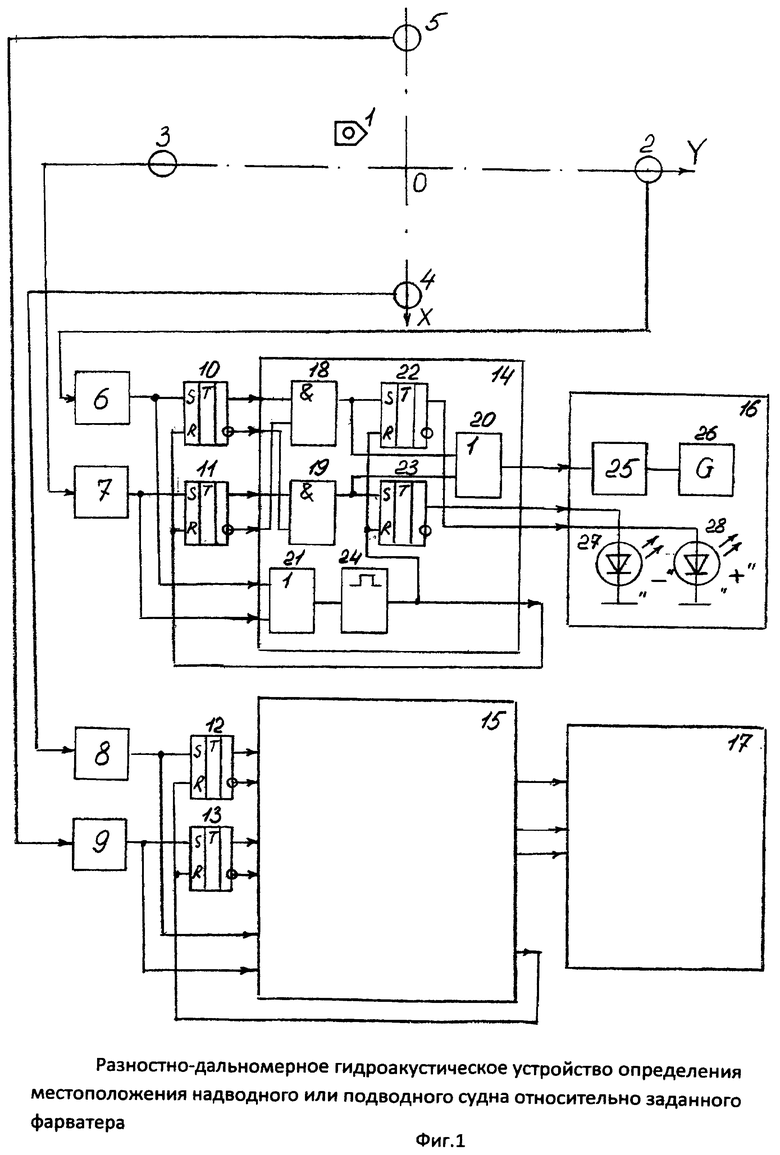
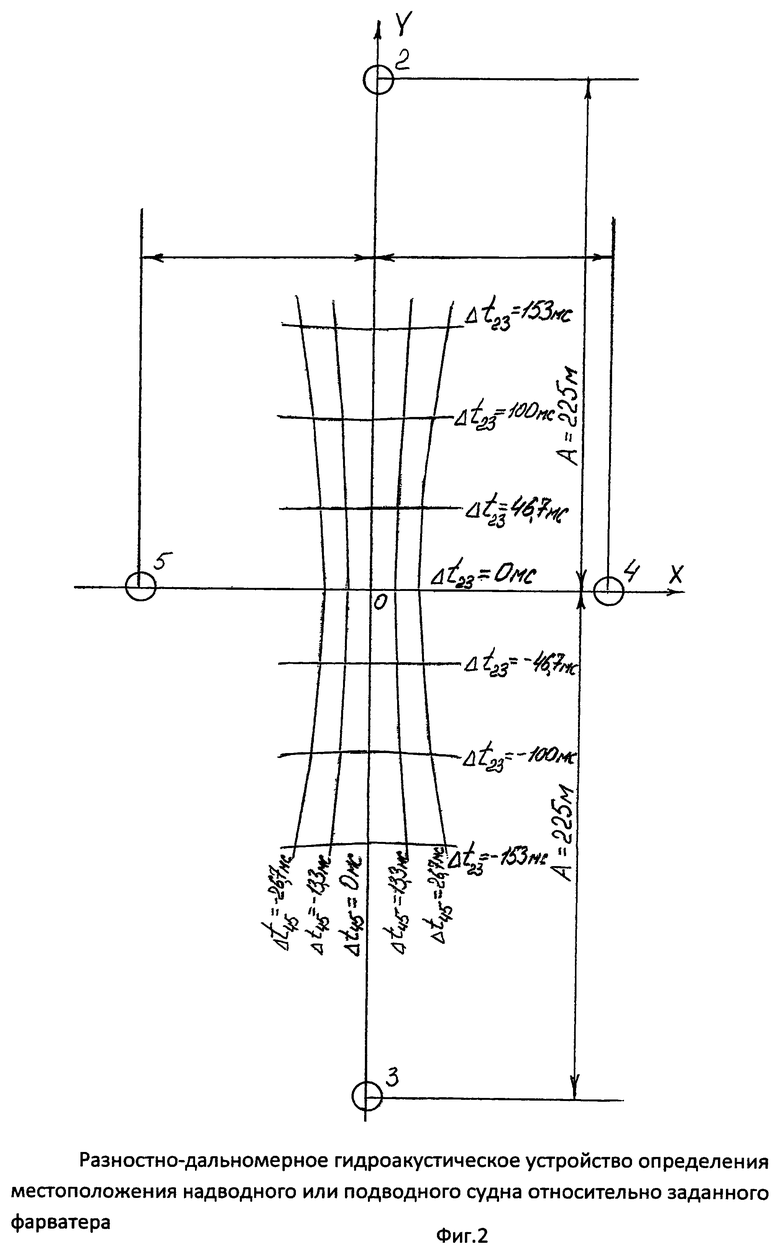
На фиг.1 представлена функциональная схема разностно-дальномерного гидроакустического устройства определения местоположения надводного или подводного судна относительно заданного фарватера. На фиг.2 показана координатная сетка вблизи заданного фарватера, создаваемая предлагаемым устройством.
Устройство содержит гидроакустический импульсный излучатель 1, установленный на судне, две пары донных гидрофонов 2, 3 и 4, 5, связанных через приемники 6, 7, 8, 9 с входами установки в «1» основных триггеров 10, 11 и 12, 13 соответствующих пар. Одна пара гидрофонов 2, 3 установлена вдоль фарватера - ось Y, другая - поперечно ему - ось X. Устройство снабжено двумя блоками 14, 15 формирования импульса временной задержки и двумя блоками 16,17 индикации продольной и поперечной координаты (y, x) судна относительно заданного фарватера. Единичные и нулевые выходы каждой пары основных триггеров 10, 11 и 12, 13 подключены к первому, второму и третьему, четвертому входам соответствующих блоков 14, 15, с пятым и шестым входами которых соединены выходы соответствующих пар приемников 6, 7 и 8, 9 акустических сигналов. С первыми тремя выходами блоков 14, 15 связаны входы блоков 16, 17 индикации продольной и поперечной координаты судна, а с четвертыми выходами - входы установки в «0» соответственно триггеров 10, 11 и 12, 13.
Каждый из блоков 14, 15 выполнен в виде двух схем И 18, 19, двух схем ИЛИ 20, 21, двух дополнительных триггеров 22, 23 и ждущего мультивибратора 24. Входы схемы И 18 подключены к первому и четвертому входам блока 14 (15), входы схемы И 19 - ко второму и третьему входам блока 14 (15), выходы схем И 18, 19 соединены с входами установки в «1» триггеров 22, 23 и через элемент ИЛИ 20 - с первым выходом блока 14 (15), со вторым и третьим выходами которого связаны выходы дополнительных триггеров 23, 22. Входы элемента ИЛИ 21 подключены к пятому и шестому входам блока 14 (15), а выход через ждущий мультивибратор 24 - к входам установки в «0» триггеров 22, 23 и к четвертому выходу блока 14 (15).
Каждый блок 16, 17 индикации продольной и поперечной координаты судна содержит частотомер 25, прецизионный генератор 26 регулируемой частоты и два светодиодных индикатора 27, 28 знака временной задержки. Вход частотомера 25 подключен к первому входу блока 16 (17), индикаторы 27, 28 - ко второму и третьему входам блока 16 (17), а генератор 26 - к входу частотомера 25 для подключения внешнего генератора.
Разностно-дальномерное гидроакустическое устройство определения местоположения надводного или подводного судна относительно заданного фарватера работает следующим образом.
Во время прохождения судна вдоль заданного фарватера (ось Y) излучатель 1 посылает в воду импульсы ультразвука, воспринимаемые парами гидрофонов 2, 3 и 4, 5, установленными вдоль и поперек фарватера. Временные сдвиги между импульсами, принимаемыми гидрофонами 2, 3 и 4, 5, пропорциональны разностям расстояний от них до излучателя 1. При этом координаты излучателя 1-x, y могут быть определены следующей системой двух гиперболических уравнений:
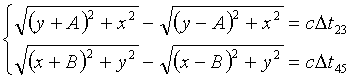 ,
,
где А - расстояние от центра О (середина фарватера, точка пересечения осей X, Y) до места установки гидрофонов 2, 3;
В - расстояние от центра О до места установки гидрофонов 4, 5;
с - скорость ультразвука в воде (с≈1500 м/с);
Δt23 - время запаздывания прихода импульса ультразвука на гидрофон 3 относительно момента его прихода на гидрофон 2, t - может быть  ;
;
Δt45 - время запаздывания прихода импульса ультразвука на гидрофон 5 относительно момента его прихода на гидрофон 4, t - может быть  ;
;
Решение системы уравнений для продольной и поперечной координат судна (излучателя 1) имеет вид:

 .
.
На фиг.2 представлены два семейства изолиний, определенных для конкретной акватории и соответствующих уравнениям гипербол, входящих в вышеприведенную систему уравнений. Изолинии построены для фиксированных значений Δt23 и Δt45. Из фиг.2 следует, что образованная изолиниями координатная сетка вблизи фарватера (оси Y) близка к прямоугольной (декартовой) системе, описываемой упрощенными выражениями:
 ,
,
 .
.
Выражения независимы друг от друга и положены в основу работы устройства.
При нахождении излучателя 1 в первом квадранте акватории, ограниченном положительными полуосями Y, X, первые принимаемые импульсы поступают от гидрофонов 2 и 4, вызывая срабатывание триггеров 10, 12. При этом в блоках 14, 15 на выходах элементов И 18 появляются единицы, устанавливающие триггеры 22 в единичное состояние и через элементы ИЛИ 20 поступающие на первые выходы блоков 14, 15. По передним фронтам формируемых импульсов в блоках 16, 17 осуществляется запуск частотомеров 25, установленных в режим измерения длительности импульса. Одновременно с этим под действием высоких потенциалов триггеров 22 в блоках 16, 17 загораются светодиоды 28, индицирующие знаки «+» временной задержки. При поступлении вторых - запаздывающих - импульсов от гидрофонов 3 и 5 срабатывают триггеры 11, 13. При этом на выходах элементов И 18 и элементов ИЛИ 20 блоков 14, 15 появляются нулевые потенциалы, завершающие формирование информационных импульсов. По задним фронтам указанных импульсов частотомеры 25 блоков 16, 17 прекращают измерение их длительностей и на некоторое время (время индикации) фиксируют результат измерения.
Для перевода показаний частотомеров 25, выраженных в миллисекундах, в метры, согласно упрощенным выражениям для координат x, y, к частотомерам 25, вместо внутренних опорных генераторов, подключены внешние, прецизионные, регулируемые по частоте генераторы 26. Выставляемая частота генераторов 26, согласно тем же выражениям, должна быть кратна половине скорости ультразвука в воде - с/2. При изменении скорости ультразвука в зависимости от температуры воды и ее солености частота генераторов 26 периодически корректируется.
Для подготовки устройства к следующему циклу измерений и для предотвращения сбоев в работе устройства, связанных с возможностью пропадания первых опережающих импульсов, в блоках 14, 15 служат элементы ИЛИ 21 и мультивибраторы 24. Длительность формируемых мультивибраторами 24 импульсов - ΔtMB, с одной стороны, превышает максимально возможную длительность импульсов  ,
,  , а, с другой, меньше периода следования Т импульсов от излучателя 1 за вычетом
, а, с другой, меньше периода следования Т импульсов от излучателя 1 за вычетом  ,
,  , иначе говоря:
, иначе говоря:

Так, при Т=1000 мс и  оптимальной длительностью ΔtMB является их среднее значение - 500 мс.
оптимальной длительностью ΔtMB является их среднее значение - 500 мс.
При правильной работе устройства мультивибраторы 24 запускаются от первых - опережающих импульсов, поступающих от одного из гидрофонов 2, 3 и 4, 5 через приемники 6, 7 и 8, 9 и элементы ИЛИ 21 блоков 14, 15. В этом случае формирование информационных импульсов на первых выходах блоков 14, 15 и измерение их длительности в блоках 16, 17 заканчивается раньше формирования импульсов на выходах мультивибраторов 24. По окончании импульсов мультивибраторов 24 по их задним фронтам производится сброс триггеров 10, 11, 12, 13 и 22, 23 в нулевое исходное состояние, необходимое для проведения следующего цикла измерений. При нарушении синхронности в работе устройства, например, при пропадании по какой-либо причине первого - опережающего импульса мультивибратор 24 запускается по второму - отстающему импульсу и обеспечивает возврат схемы устройства в исходное состояние до прихода первого - опережающего импульса из следующей пары импульсов от гидрофонов 2, 3 и 4, 5. Благодаря этому восстанавливается правильная работа устройства.
При переходе излучателя 1 из первого квадранта, например, в четвертый, ограниченный отрицательными полуосями Y, X, первые - опережающие импульсы поступают от гидрофонов 3, 5, вызывая срабатывание триггеров 11, 13. На выходе элементов И 19 блоков 14, 15 появляется единица, которая через элементы ИЛИ 20 запускает частотомеры 25 блоков 16, 17, а через триггеры 23 зажигает светодиоды 27
«-». С приходом отстающих импульсов от гидрофонов 2, 4 срабатывают триггеры 10, 12. На выходе элементов И 19 и элементов ИЛИ 20 появляются нулевые потенциалы, завершающие формирование информационных импульсов. Частотомеры 25 отображают координаты излучателя 1. Мультивибраторы 24, запущенные первыми импульсами, по окончании формируемых импульсов сбрасывают триггеры 10, 11, 12, 13, 22, 23 в исходное нулевое состояние. Дальнейшая работа устройства происходит аналогичным образом.
В результате в блоках 16, 17 индицируются величины смещений излучателя 1 от осей Y и Х с указанием знака этих смещений.
Таким образом, предлагаемое устройство реализует достаточно простой, надежный и точный способ определения координат объекта относительно заданного фарватера. Минимальное количество вычислительных операций обеспечивает высокое быстродействие и малые аппаратурные затраты. Использование стандартного, широко распространенного оборудования повышает универсальность и снижает стоимость устройства.
При необходимости повысить точность определения координат объекта во всей акватории устройство должно быть снабжено счетно-решающим устройством, вычисляющим координаты в соответствии с точными математическими выражениями и работающим в реальном масштабе времени. Исходными данными для него могут служить как импульсы и сигналы знака с выходов блоков 14, 15, так и цифровые коды, снимаемые с выходов частотомеров 25 по окончании счета длительности импульсов.
Устройство может быть использовано при проводке судна по морским каналам, в бухтах и гаванях, над измерительными и обрабатывающими стендами, в частности, при измерении намагниченности и последующем размагничивании судов. С помощью радиосвязи информация о положении судна может передаваться и на его собственный борт.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2517775C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ СУДНА ПО ФАРВАТЕРУ | 1975 |
|
SU1840666A1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| Гидроакустическая дальномерная система навигации | 2016 |
|
RU2624980C1 |
Изобретение относится к гидроакустическим разностно-дальномерным навигационным системам. Согласно изобретению на судне установлен гидроакустический импульсный излучатель, вдоль и поперек заданного фарватера размещены две пары донных гидрофонов, соединенных с двумя парами триггеров. Устройство снабжено двумя блоками формирования импульса временной задержки и двумя блоками индикации продольной и поперечной координаты судна. Блоки формирования импульса временной задержки выполнены в виде двух схем И, двух схем ИЛИ, двух дополнительных триггеров и ждущего мультивибратора. Блоки индикации продольной и поперечной координаты судна содержат частотомер, прецизионный генератор регулируемой частоты и два светодиодных индикатора знака временной задержки. Перечисленные средства определенным образом соединены между собой. Достигаемым техническим результатом изобретения является упрощение определения координат, судна, повышение быстродействия и надежности устройства, сокращение объема оборудования. 2 ил.
Разностно-дальномерное гидроакустическое устройство определения местоположения надводного или подводного судна относительно заданного фарватера, содержащее гидроакустический импульсный излучатель, установленный на судне, две пары донных гидрофонов, связанных через приемники акустических сигналов с входами установки в «1» основных триггеров соответствующих пар, отличающееся тем, что одна пара гидрофонов установлена вдоль фарватера, другая - поперечно ему, а устройство снабжено двумя блоками формирования импульса временной задержки, каждый из которых включает в себя две схемы И, две схемы ИЛИ, два дополнительных триггера и ждущий мультивибратор, и двумя блоками индикации продольной и поперечной координаты судна относительно заданного фарватера, каждый из которых содержит частотомер, прецизионный генератор регулируемой частоты и два светодиодных индикатора знака временной задержки, причем единичные и нулевые выходы основных триггеров каждой пары подключены к первому, второму и третьему, четвертому входам соответствующего блока формирования импульса временной задержки, с пятым и шестым входами которого соединены выходы соответствующих пар приемников акустических сигналов, с первыми тремя выходами каждого блока формирования импульса временной задержки связаны входы блоков индикации продольной и поперечной координаты судна, а с четвертыми выходами - входы установки в «0» соответствующей пары основных триггеров, при этом входы первой схемы И блоков формирования импульса временной задержки подключены к их первому и четвертому входам, входы второй схемы И - к второму и третьему входам блоков, выходы схем И соединены с входами установки в «1» соответствующих дополнительных триггеров и через первый элемент ИЛИ - с первым выходом блоков, со вторым и третьим выходами которых связаны выходы дополнительных триггеров, входы второго элемента ИЛИ подключены к пятому и шестому входам блоков, а выходы через ждущий мультивибратор - к входам установки в «0» дополнительных триггеров и к четвертому выходу блоков формирования импульса временной задержки, причем входы частотомеров блоков индикации подключен к их первым входам, светодиодные индикаторы знака временной задержки - ко второму и третьему входам соответствующих блоков, а прецизионные генераторы регулируемой частоты - к входам частотомеров для подключения внешнего генератора.
| Кантователь штучных грузов | 1984 |
|
SU1162714A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДВУХ ДЕКАРТОВЫХ КООРДИНАТ ОБЪЕКТА | 1990 |
|
RU2020514C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| Торцефрезный станок для обработки длинномерных деталей | 1949 |
|
SU86321A1 |
| RU 2052838 С1, 20.01.1996 | |||
| US 5579285 А, 26.11.1996 | |||
| JP 2004191125 А, 08.07.2004 | |||
| CN 101644759 А, 10.02.2010 | |||
| ЕР 811853 В1, 10.04.2002. | |||

