(54) МЕХАНО-Г1НЕВМАТ11ЧЕСК11П .ДЗОВЛТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механо-пневматический преобразователь | 1979 |
|
SU857579A2 |
| Механопневматический преобразователь | 1988 |
|
SU1528976A1 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| Реле времени | 1985 |
|
SU1309109A1 |
| Пневматический усилитель | 1983 |
|
SU1130700A1 |
| Пневматический логический элемент | 1977 |
|
SU632835A1 |
| Насос для вязких и неоднородных жидкостей | 1986 |
|
SU1399500A1 |
| Распределительное устройство | 1975 |
|
SU602698A1 |
| УСТРОЙСТВО ДЛЯ ДОЗИРОВАННОГО ВВЕДЕНИЯ ПОРОШКООБРАЗНОГО ВЕЩЕСТВА | 1990 |
|
RU2091088C1 |
| ПНЕВМАТИЧЕСКИЙ ЛОГИЧЕСКИЙ ЭЛЕМЕНТ | 1998 |
|
RU2157927C2 |
Изобрете п1е относится к пневмоавтоматике, а именно к механико-нневматическим преобразователям, которые применяются в пневматических кнопках, тумблерах, конечных выключателях и других устройствах.
В технической литературе описаны различные механо-пневматические преобразователи fl.
Наиболее близким к предлагаемому изобретению по схеме и конструкции является преобразователь, содержащий подпружиненН1 1Й нажимной шток и формирователь выходного сигнала, выполненный в виде логического элемента, например со свободными мембранами-дисками 2.
Недостатком известных устройств является относительно невысокая надежность из-за использования дросселя и малое быстродействие при отпускании подпружиненного штока за счет наполнения командой камеры формирования через дроссель.
Цель изобретения - повышение надежности и быстродействия устройства.
Это достигается те.м, что в преобразователе установлен толкатель с кольцевым выступом и дополнительная пружина, связанная с нажимным штоком и одним концом толкателя, другой конец которого связан с одной из
мембран-дисков логического элемента, а шток выполнен с кольцевым выступо.м, внутренний диаметр которого менъше внешнего диаметра кольцевого выстуиа толкателя.
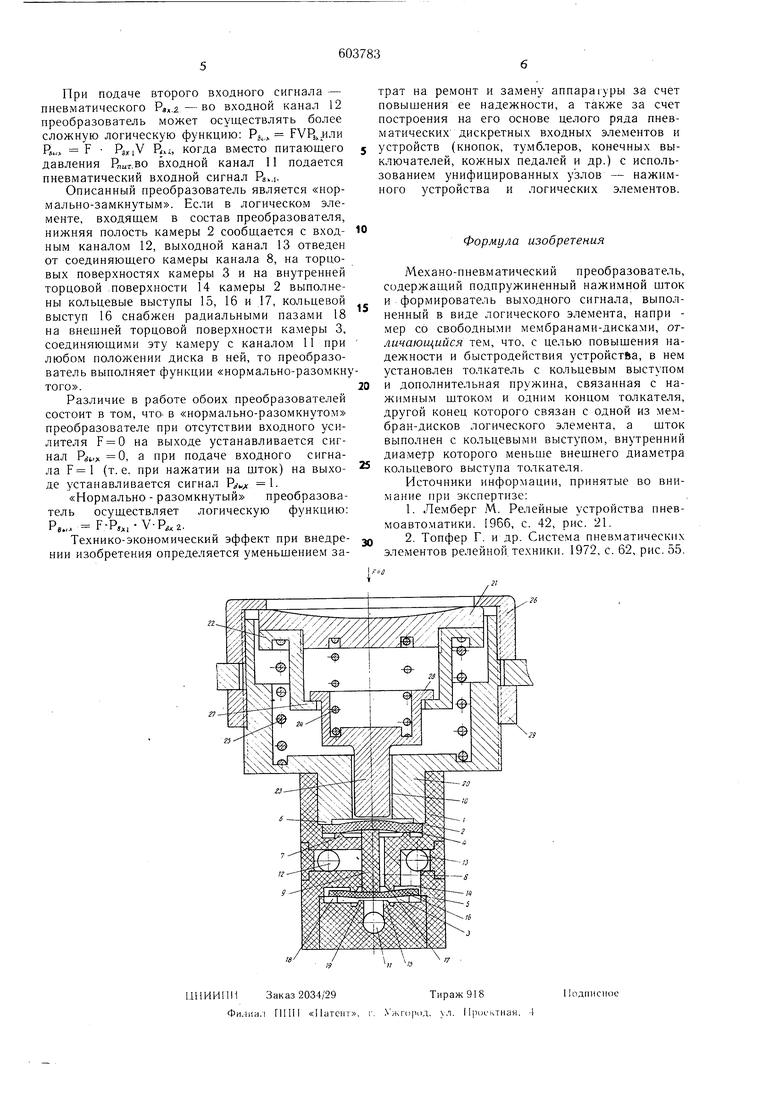
На чертеже схематично изображено предлагаемое устройство.
Преобразователь содержит формирователь выходного сигнала, выполненный в виде логического элемента с корпусо.м 1, камерами 2,3 и мембранами-дисками 4 и 5, выполненными из эластичного материала (например резины). На торцовых поверхностях камеры 2 имеются кольцевые выступы 6 и 7, причем расстояние (по оси элемента) между выступа.ми меньше толшины диска 4, а внутренний диаметр выступа 6 больше внешнего диаметра выступа 7.
Камеры соединяет канал 8 со свободно размещенным в нем стержнем 9 треугольного сечения, причем диски 4 и 5 не скреплены со стержнем 9. Камеры снабжены входными каналами 10 и 11, а соединяюший камеры канал 8 сообщается с третьи.м входным каналом 12. Выходной канал 13 отведен от торповой поверхности 14 камеры 3. На торцовых поверхностях камеры 3 выполнены кольцевые выступы 15, 16 и 17. Расстояние по оси элемента .между кольцевыми выступа.ми 16 и 17
меньше толщины диска 5. Внешний диа.метр
кольцевого выступа 17 меньше внутреннего диаметра кольцевого выступа 16. Кольцевой выступ 16 снабжен радиальными пазами 18, соединяющими входной канал 11 с выходным каналом 13 при отсутствии входного сигнала от нажимного устройства. Внутренний диаметр кольцевого выступа 17 больше входного канала 11 на поверхности 19 кольцевого выступа 15. Диаметр диска 5 меньше диайетра камеры 3. Диск 5 с торцовыми поверхностями выступов 15 и 17 составляет два пневмоконтакта, между которыми подведен выходной канал 13.
Нажимное устройство состоит из корпуса 20, скрепленного с корпусом 1 логического элемента, двух деталей 21, 22 нажимного штока толкателя 23, который своей узкой частью размещен в соединенном с атмосферой входном канале 10 логического элемента, дополнительной компенсационной, пружины 24, возвратной пружины 25 и накидной гайки 26. Две детали 21 и 22 штока скреплены между собой. Между штоком и толкателем 23 раз.мещена предварительно поджатая компенсационная пружина 24. Внутренний диаметр кольцевого выступа 27 щтока меньше внешнего диаметра кольцевого выступа 28 толкателя.. Преобразователь крепится с помощью гайки 29.
Устройство работает следующим образом.
При отсутствии входного усилия (F 0) возвратная пружина 25 отводит нажимной шток в крайнее верхнее положение и прижимает его к накидной гайке 26. При этом шток своим кольцевым выступом захватывает кольцевой выступ 28 толкателя 23 и отводит его также в крайнее верхнее положение. При этом эластичные диски 4 и 5 и стержень 9 логического элемента также находятся в крайнем верхнем положении. Диск 5 прижат к кольцево.му выступу 17. При этом камера и выходной канал 13 отсоединены от каналов 8, 12 и соединены с входным каналом И. Входные каналы 10, 12 соединены с атмосферой, а входной канал 11 соединен с источником питающего воздуха {Рг,ит} Благодаря тому, что диск 5 при отсутствии входных сигналов прижат к выступу 17, при подаче питающего давления в канал 11 исключается «короткое замыкание (т.е. кратковременное соединение источника питания с атмосферой).
Таким образом, при отсутствии входного усилия (F 0) при подаче питающего давления во входной канал 11 на выходе 13 логического элемента устанавливается вь ходной сигнал Р,. 1.
При нажатии на шток, т.е. при подаче входного сигнала () вначале происходит сжатие только возвратной пружины 25, а шток и толкатель 23 с компенсационной пружиной 24 перемешаются вниз до того момента, когда толкатель 23 коснется диска 4. После этого толкатель 23 останавливается, а шток продолжает перемещаться вниз, сжимая при этом не только возвратную пружину 25, но и компенсационную пружину 24. Когда усилие сжатия компенсационной пружины возрастет до величины, достаточной для срабатывания логического элемента, толкатель 23 переместит диски 4, 5 и стержень 9 в крайнее нижнее положение. При этом диск 5 отрывается от кольцевого выступа 17 и прижимается к кольцевому выступу 15. При этом выходной канал 13 отсоединяется от входного канала 11 (соединенного с источником питания) и соединяется с входным каналом 12 (соединенным с атмосферой) через камеру 3 и канал 8.
При этом на выходе 13 устанавливается выходной сигнал Pgb,x 0. Па этом заканчивается рабочий ход. При дальнейщем нажатии на щток до упора происходит дальнейшее сжатие возвратной 25 и компенсационной 24 пружин. На выходе при это.м продолжает сохраняться сигнал Р.л 0 (т. е происходит холостой ход). Для уменьшения рабочего хода щтока усилие предварительного поджатия компенсационной пружины 24 необходимо увеличивать.
При опускании щтока (Р 0) возвратная
пружина 25 перемейгает вверх сначала только детали 21, 22 штока, ослабляя одновременно сжатие компенсационной пружины 24. Когда внутренний выступ 27 штоков входит в зацепление с внешни.м кольцевы.м выступом 28 толкателя 23, под действием возвратной пружины толкатель 23 также перемешается вверх и выходит из соприкосновения ,с диском 4. При это.м под действие питающего давления во входном канале 11 диски 4, 5 и стержень 9
пере.мещаются в крайнее верхнее положение. При этом диск 5 отрывается от кольцевого выступа 15 и прижимается к кольцевому выступу 17, а выходной канал 13 снова отсоединяется от канала 12 (соединенного с атмосферой) и соединяется с каналом 11. (соединенным с источником питания). На выходе снова устанавливается сигнал P, 0. Далее возвратная пружина 25 отводит детали 21 и 22 щтока и толкатель 23 в крайнее верхнее по-, ложение, возвращая преобразователь в исходное состояние.
Благодаря тому, что пневмоконтакт, образуемый диском 5 с кольцевым выстуио.м 17, имеет больщую эффективную площадь, чем пневмоконтакт, образуемый диском 5 кольцевым вы.ступом 15, в логическом элементе имеется внутренняя положительная обратная связь,, которая при нажатии и отпускании щтока помогает срабатыванию и, таким образо.м, ускоряет процессы установления на выходе сигналов О и 1.
Б.тгодаря тому, что в логическом элементе эластичные диски 4, 5 не зажаты по периферии и не скреплены со стержнем 9, значительно уве;1ичивается долговечность и надежность преобразователя за счет устранения возможности разрывов дисков в местах заделки.
При соединении входного канала 12 с атмосферой ( 0) преобразователь осуществляет логическую функцию Н, - «отрицание (где F - механический входной сигнал) или P«i,F-Pa, -«запрет, когда во входной канал 11 в.место подается пневматический входной сигнал Pj.(.
