1
Изобретение относится к области систем автоматического управления (САУ) и может быть использовано в системах управления ле.тательных аппаратов с ограничением скорости изменения управляющего сигнала, содержащего помеху.
Известны устройства, для устранения отрицательного влияния ограничения 1.
Наиболее близким по технической сущности решением является устройство 2, содержащее первый коммутатор, выход которого связан со входом элемента с ограничением, источник постоянного напряжения, выход которого подсоединен ко входу первого коммутатора, элемент сравнения, входы которого подключены ко входам первого коммутатора и выходу элемента с ограничением, а выход через второй коммутатор - ко входам первого и второго интеграторов, в цепь обратной связи которых включены выпрямительные элементы, например диоды, при этом выходы первого и второго коммутатора связаны с управляющими входами первого коммутатора.
Целью изобретения является увеличение средне1о значения управляющего сигнала при двухстороннем ограничении сигнала помехи.
Для этого устройство дополнительно содержит фиксатор периода изменения управляющего сигнала, третий коммутатор и третий интегратор, при этом выход третьего интегратора подключен к управляющему входу второго коммутатора, а вход - ко входам первого коммутатора и фиксатора периода изменения управляющего сигнала, выход которого через третий коммутатор связан со входами интегратора.
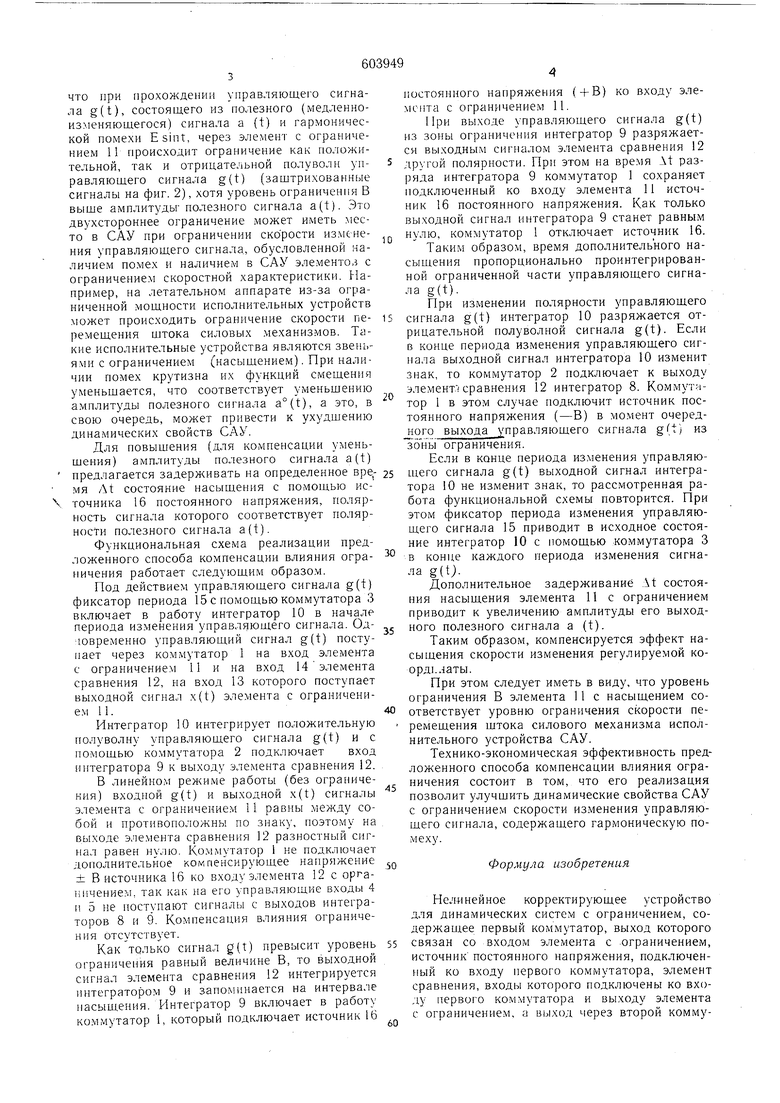
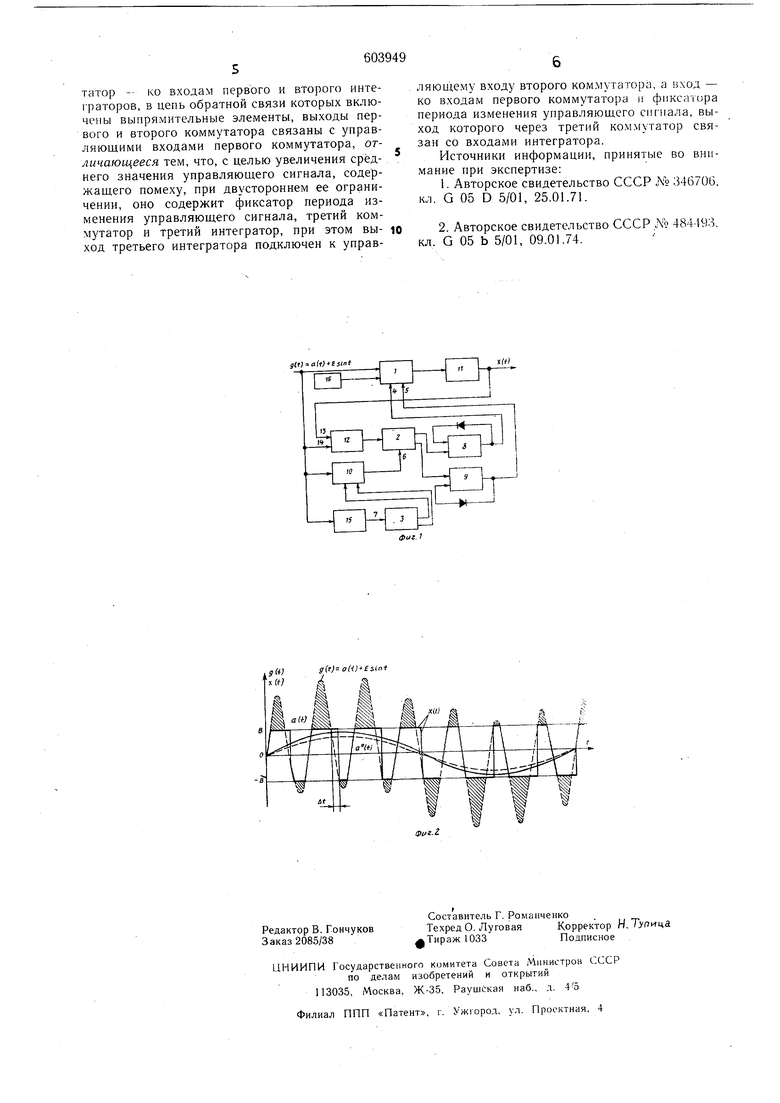
На фиг. 1 изображена функциональная схема предлагае.мого корректирующего устройст0 на; на фиг. 2 - эпюры сигналов, поясняющие работу функциональной схемы.
Предлагаемое устройство содержит коммутаторы 1-3, управляющие входы 4-7 коммхтаторов 1-3 соответственно, интеграторы 810, элемент 11 с ограничением (насыщением),
5 элемент сравнения 12, входы 13 и 14 элемента сравнения 12, фиксатор 15 периода изменения управляющего сигнала; источник 16 постоянного напряжения, равного уровню ограничения.
Via фиг. 2 приняты следующие обозначе0ния g(t) - управляющий сигнал: X(t) -вы.ходной сигнал, a(t) - амплитуда полезного сигнала, В - величина уровня ограничения.
Отрицательное влияние ограни-и 1П1я на дп5 намические свойства САУ проявляется в том. ЧТО при прохождении управляющего сигнала g(t), состояпдего из полезного (медленноизменяющегося) сигнала а (t) и гармонической помехи Esint, через элемент с ограничением 11 происходит ограничение как положительной, так и отрицательной полуволн управляющего сигнала g(t) (защтрихованные сигналы на фиг. 2), хотя уровень ограничения В выше амплитудьг полезного сигнала a(t). Это двухстороннее ограничение может иметь место в САУ при ограничении скорости изменения управляющего сигнала, обусловленной наличием помех и наличием в САУ элементов с ограничением скоростной характеристики. Например, на летательном аппарате из-за ограниченной мощности исполнительных устройств может происходить ограничение скорости перемещения щтока силовых механизмов. Такие исполнительные устройства являются звеньями с ограничением (насыщением). При наличии помех крутизна их функций смещения уменьщается, что соответствует уменьшению амплитуды полезного сигнала a°{t), а это, в свою очередь, может привести к ухудщению динамических свойств САУ. Для повышения (для компенсации уменьшения) амплитуды полезного сигнала a(t) предлагается задерживать на определенное время At состояние насыщения с помощью источника 16 постоянного напряжения, полярность сигнала которого соответствует полярности полезного сигнала a(t). Функциональная схема реализации предложенного способа компенсащп влияния ограничения работает следующим образом. Под действием управляющего сигнала g(t) фиксатор периода 15 с помощью коммутатора 3 включает в работу интегратор 10 в начале периода изменения управляющего сигнала. Одювременно управляющий сигнал g(t) поступает через коммутатор 1 на вход элемента с ограничением 11 и на вход 14 элемента сравнения 12, на вход 13 которого поступает выходной сигнал x(t) элемента с ограничение.м 11. Интегратор 10 интегрирует положительную полуволну управляющего сигнала g(l) и с помощью коммутатора 2 подключает вход интегратора 9 к выходу элемента сравнения 12. В линейном режиме работы (без ограничения) входной g(t) и выходной x(t) сигналы элемента с ограничением 11 равны между собой и противоположны по знаку, поэтому на выходе элемента сравнения 12 разностный сигнал равен нулю. Ком.мутатор 1 не подключает дополнительное компенсирующее напряжение ± В источника 16 ко входу элемента 12 с органичением, так как на его управляющие входы 4 и 5 не поступают сигналы с выходов интеграторов 8 и 9. Компенсация влияния ограничения Отсутствует. Кактолько сигнал g(t) превысит уровень ограничения равный величине В, то выходной сигнал элемента сравнения 12 интегрируется интегратором 9 и запоминается на интервале насыщения. Интегратор 9 включает в работу коммутатор 1, который подключает источник 16 ПОСТОЯННОГО напряжения (-I-B) ко входу элемента с ограничением И. При выходе управляющего сигнала g(t) из зоны ог)аничен11я интегратор 9 разряжается выходным сигналом элемента сравнения 12 другой полярности. Прп этом на время At разряда интегратора 9 коммутатор 1 сохраняет подключенный ко входу элемента 11 источник 16 постоянного напряжения. Как только выходной сигнал интегратора 9 станет равным нулю, коммутатор 1 отключает источник 16. Таким образом, время дополнительного насыщения пропорционально проинтегрированной ограниченной части управляющего сигнала g(t). При изменении полярности управляющего сигнала g(t) интегратор 10 разряжается отрицательной полуволной сигнала g(t). Если в конце периода изменения управляющего сигнала выходной сигнал интегратора 10 изменит знак, то коммутатор 2 подключает к выходу элемент1 сравнения 12 интегратор 8. Коммутатор 1 в этом случае подключит источник постоянного напряжения (-В) в момент очередного выхода управляющего сигнала g(1:) из оны ограничения. Если в конце периода из.менения управляющего сигнала g(t) выходной сигнал интегратора 10 не изменит знак, то рассмотренная работа функциональной схемы повторится. При этом фиксатор периода изменения управляющего сигнала 15 приводит в исходное состояние интегратор 10 с помощью коммутатора 3 в KOHi;e каждого периода изменения сигнала g(t;. Дополнительное задерживание М состояния насыщения элемента 11 с ограничением приводит к увеличению амплитуды его выходного полезного сигнала а (t). Таким образом, компенсируется эффект насыщения скорости изменения регулируемой коордклаты. При этом следует иметь в виду, что уровень ограничения В элемента 11 с насыщением соответствует уровню ограничения скорости перемещения штока силового механизма исполнительного устройства САУ. Технико-экономическая эффективность предложенного способа компенсации влияния ограничения состоит в том, что его реализация позволит улучшить динамические свойства САУ с ограничением скорости изменения управляющего сигнала, содержащего гармоническую помеху. Формула изобретения Нелинейное корректирующее устройство для динамических систем с ограничением, содержащее первый коммутатор, выход которого связан со входом элемента с ограничением, источник постоянного напряжения, подключенный ко входу первого коммутатора, элемент сравнения, входы которого подключены ко входу первого коммутатора и выходу элемента с ограничением, а выход через второй коммутатор - ко входам первого и второго интеграторов, в цепь обратной связи которых включены выпрямительные элементы, выходы первого и второго коммутатора связаны с управляющими входами первого коммутатора, отличающееся тем, что, с целью увеличения среднего значения управляющего сигнала, содержащего помеху, при двустороннем ее ограничении, оно содержит фиксатор периода изменения управляющего сигнала, третий коммутатор и третий интегратор, при этом выход третьего интегратора подключен к управляющему входу второго коммутатора, а иход - ко входам первого коммутатора и фиксатора периода изменения управляющего сигнала, выход которого через третий коммутатор связан со входами интегратора.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР „V9 346706, кл. G 05 D 5/01, 25.01.71.
2.Авторское свидетельство СССР „N 484-193. кл. G 05 b 5/01, 09.01.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ОБОРОТОВ | 1999 |
|
RU2173022C2 |
| Устройство для фазового управления вентильным преобразователем | 1982 |
|
SU1026281A2 |
| Нелинейное корректирующее устройство | 1980 |
|
SU951231A1 |
| Способ компенсации влияния помех на динамические свойства автоматических систем с ограничением | 1974 |
|
SU540255A1 |
| Устройство для подавления помех | 1983 |
|
SU1095419A1 |
| Устройство для компенсации помех | 1978 |
|
SU763846A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU894630A2 |
| Привод | 1977 |
|
SU679933A1 |
| Вентильный электродвигатель | 1988 |
|
SU1497690A2 |
| Устройство для учета и контроля времени оптимального периода технического обслуживания изделия | 1989 |
|
SU1647613A2 |
jtt) aM4f5Ui
g(i)ff(t)o()
%i()
K(f
фиг, J
yitfi.Z.
