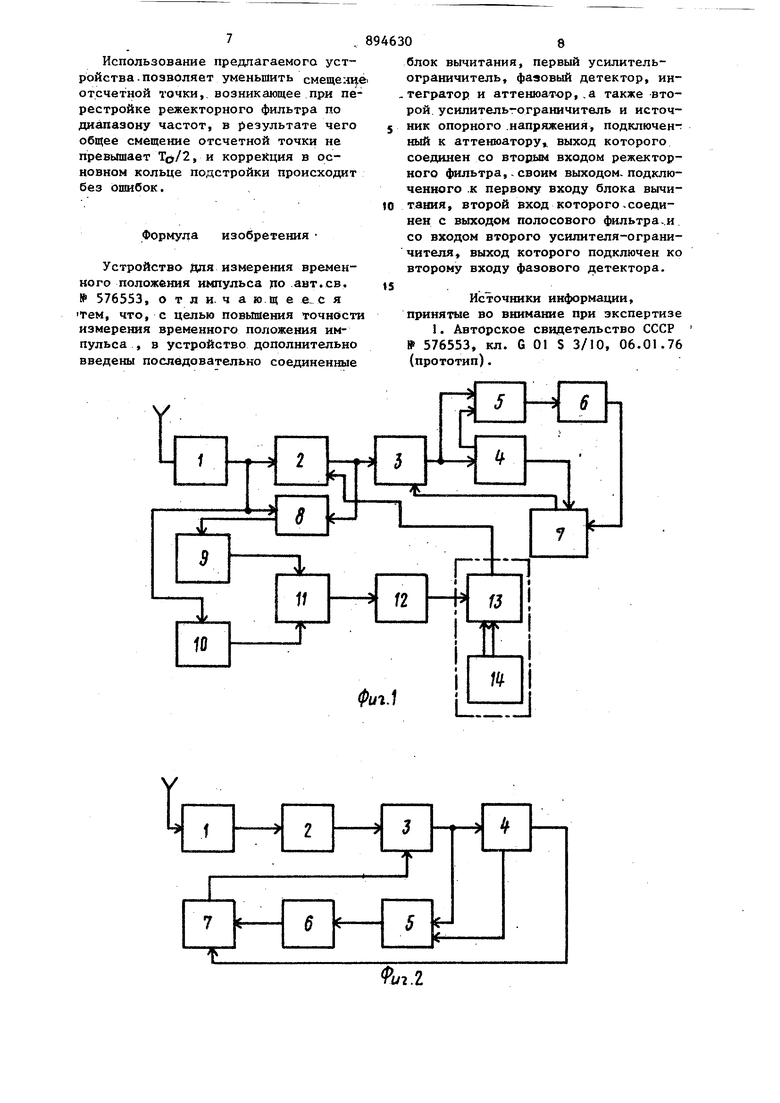
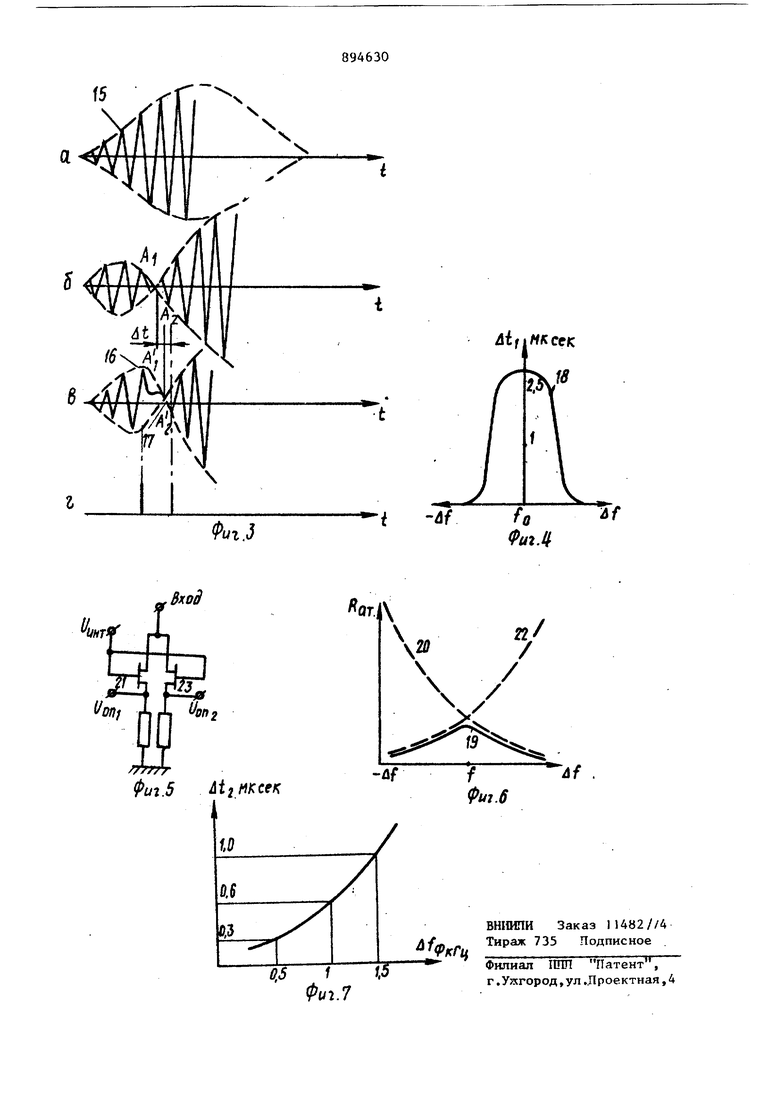
Изобретение относится к системам точного измерения, малых интервалов времени, используемым, например,в области систем точного времени для синхронизации сигналов с помощью радиотехнических средств, По основному авт.св. № 576553 язвёстно устройство для измерения временного положения импульса, содержащее последовательно соединенны полосовой фильтр, режекторный фильт блок формирования отсчетной точки, регистратор, а также последовательн соединенные анализатор знака рассогласования параметров сигнала, нако питель и коммутатор, при этом вход анализатора знака рассогласования п ргметров сигнала соединен с выходом блока формирования отсчетной точки, выход коммутатора соединен с управляюпшм входом блока формирования отсчетной точки, а управляющие входы анализатораи коммутатора соединены с соответствующими выходами регистратора 1. При работе устройства сигнал и помеха поступают на полосовой и режекторный фильтры, где помеха фильтруется, и далее - на блок формирования отсчетной точки, на выходе которого образуется разнополярный сигнал по алгоритму Ugx (t) - K-Ue i (t), где ( (t)- производная от Uex(t)f a К - весовой коэффициент,-определяющий временное положение отсчетной точки. Неискаженным является сигнал на выходе блока- формирования -отсчетной точки, у которого стробируемые определенными импульсами амплитуды по обе стороны от отсчетной точки равны А/( АЭ- Однако вследствие изменений параметров сигналов при их распространении и при изменении параметров фильтров возникают искажения в форме огибающей радиоимпульса и наступает рассогласование амплитуд (A/t 7 Afi), что эквивалентно смещению временного положения, отсчетной точки и в итоге приводит . к ошибкам,измерения. Рассогласование амплитуд A/j и Ад приводит также к ухудшениюотношения сигнал/шум -для меньшей из полуволн и, соответственно, .к ухудшению вероятности правильного-отсчета временного положения импульса. В анализаторе -Выделяется сирнал. рассогласования того или иного-знака, который затем посленакопления в накопителе,-поступает через, коммутатор на управлякщий вход бяока. формирования-для коррекции параметров (Сигнала.. При распространении радиосигналов над трассой с плохой проводимостью (например-, гористая местность зона вечной мерзлоты, смешанная-трасса участка суша-море) рассогласование. огибанщей и фазы сигналов- может- достигать 4-4,5 МКС. В то же время, при воздействии узкополосшлх помех и перестройке режекторного фильтра. по частоте уход характерной точки, вследствие искажений амшштудно--ча сг тотйой характеристики.всего тракта характеристикой режекторного фильтра составляет 2-2,5 мкс, а о.бщий.уход на рабочей частоте 100 кГц. соЬтавляет 6-7 МКС, т.е. превышает Тв/2, где TO - период несущей. Уход отст; четной точки больше, чем То/2, соответствует,- как известно, потере устранения .многозначности фазовых отсчетов, и, следовательно, ведет к снижению точности измерения-вре.менных интервалов, так как подстройка в известной устройстве может вестись только в пределах TO/2. Цель изобретения - повышение точности измерения временного.положения импульса. Указанная цель достигается тем, что в устройство дпя-измершшя временного положения импульса -дополни тельно введены последовательно соединенные блок вычитания, первый .усилитель-ограничитель,, фазовый детектор, интегратор и аттенюатор, а .также второй усилитель-ограничитель и источник опорного напряжения, подклю ченный к аттенюатору, выход которого соединен со вторым входом режекторно го фильтра, своим выходом подключенного к первому входу блока вычитания второй вход которого соединен с вы04ходом полосового фильтрами со входом второго усилителя-ограничителя,выход которого подключен ко второму входу фазового детектора. На фиг.1 приведена структурная схема предлагаемого устройства; н фиг.2 - структурная схема известного устройства; на иг.3 - эпюры сигналов; на фиг.4 - 7 - пояснение работы устройства. Устройство .для измерения временного положения импульса содержит полосовой фильтр 1, режекторный 1фильтр 2,блок 3 формирования, регистратор 4, анализатор 5 рассогласования,, накопитель 6,. коммутатор 7, блок 8 вычитания, первый усшгатепьограничитель 9, второй усилитель-:г ограничитель 10, фазовый, детектор 11, интегратор 12, аттенюатор 13 и источник 14 опорног/э напряжения. Устройство работает следующим образом. На вход режектор1 ого фильтра 2 от антенны через полосовой фильтр 1 поступает смесь полезного сигнала 15 (фиг.3,а) и узкополоаной помехи. Режекторнй фильтр 2 настривается на частоту помехи. При.Зтом изменение.временного положения отсчетной точки, обусловленг ное искажением частотной характеристики тракта частотной характеристикой режекторного фильтра 2, котОрбе выражается в изменении амплитуд полуволн 16,17 (фиг.З,), имеет зависимость, представленную кривой 18 (фиг.4). Как видно из зпюры фиг.4, смещение отсчетной точки л1 .достигает максимума при приближении частоты помехи к несущей частоте сигнала ij-s , ЗдесьAf fn - fo |-где fn- частота помехи. На фиг.7 представлена зависимость величины смещения отсчетной точки at от величины полосы вырезания режекторного шьтра 2. Величина смещения At2 прямо пропорциональна ширине полосы вырезания. Если привести в необходимое соответствие изменение величины полосы вырезания, частоту настройки фильтра и смещение отсчетной точки, то можно стабш1нзиро1вать,скорректировать и уменьшить зто смещение. С этой целью сигнал и помеха со входа и выхода режекторного фильтра 5 2 поступают на входы блока 8 вычитания, выход которого имеет фазовую характеристику резонансного контура фазой, равной нулю при настройке режекторного фильтра 2 на. частоту п Мехи. При этом на выходе блока 8 вычит ния образуются радиосигналы, фазовы кабег заполнения которых зависит от ширины полосы режекторного фильтра 2. Сигнал и помеха со входа режекторного фильтра 2 и полученная таки образом смесь сигнала и помехи с выхода блока 8 вычитания поступают второй и первый усилители-ограничители 10 и 9 соответственно, которые нормируют эту смесь независимо от амплитуды на входе устройства, и далее - на фазовый детектор П. Поскольку режёкторный фильтр 2 .настроен на помеху,то фазы напряжений помехи на обоих входах фазового детектора П равны, и на выходе интегратора 12 соответствует сигнал рассогласования. В то же время для сигнала напряж ние на выходе интегратора 12 зависит от частоты настройки режекторно го фильтра 2, Действительно, так как частота fo сигнала с большой точностью поддерживается равной 100 кГц, наприме для навигационной системы типа Лоран-С, то совпадение фаз напряжений сигнала на входах фазового дете тора возможно только при настройке режекторного фильтра 2 на частоту помехи, равную несущей fo . При перестройке режекторного фил ра 2 влево и вправо относительно не сущей, фаза сигнала на выходе блока 8 вычитания изменяется так, что зна изменения фазы определяется знаком расстройки режекторного фильтра 2 относительно несущей сигнала. В результате на выходе интеграто ра 12 образуется напряжение рассогласования, зависящее от знака: и величины расстройки. Это напряжение поступает на аттешоатор 13. Если аттенюатор 13 выполнить (фиг.5) в видепараллельно включенных полевых триодов с разной проводимостью, на истоки которых подано от источника 14 опорного напряжения опорное напряжение Uom и (ion соответствующей полярности, то при подаче на затворы триодов напряже0ния с интегратора Uuntn суммарное сопротивление, аттенюатора R изменяется по закону, который изображен на фиг.6 (кривая 19), причем 20-- изменение сопротивления участка .сток-itcток триода 21, а 22 - для триода 23, а так как при, параллельном соединении сопротивлений суммарное всегда меньше меньшего, то изменение общего сопротивления аттенюатора один максимум в точке пересечения 1кривых 20 и 21. Соответствующим под- ;бором опорных.напряжений можно добиться того, чтобы максимум кривой 19 соответствовал частоте fo ,т.е. несущей частоте сигнала. Таким образом, при перестройке режекторного фильтра 2 по диапазону частот, полоса режекции изменяется, становясь более широкой .на краях полосы и сужаясь при приближении к несущей. Временное смещение (фиг.7} прямо пропорционально. вшрине полосы .режекции, таким образом, происходит коррекция изменения величины смещения временного положения отсчетной точки и, следовательно, стабилизация отношения сигнал/шум для стробируемых полуволн А,) и Ag (фиг.3,5 ,6 ) . Смещение отсчетной точки, обуслов ленное режекторными фильтрами может достигать 2-2,5 мкс, что эквивалентно разбалансу полуволн А и Ад до 50%, т.е. ухудшение отношения .сигнал/шум для одной из полуволн. Известно, что шумовая ошибка измерения .фазы на выходе фазоследящих фильтров, выраженная во времени, может быть представлена в виде формулыде ОЗ , Рц - соответственно кругоая частота высокочастотного -заполения радиоимпульсов и частота слеования импульсов; Кэф - отношение сигнал/шум; Пел эффективная полоса пропускания замкнутой системы слежения за фазой, Гц. Следовательно, описанная коррекция римерно в 2 раза уменьшает значение умовой ошибки -измерения фазы и во только же раз nosbmiaer точность пределения .радионавигационного пааметра.
Использование предлагаемого устройства .позволяет уменьшить смеще:л|е отсчетной точки,, возникающее при перестройке режекторного фильтра по диапазону частот, в 1 езультате чего общее смещение отсчетной точки не превышает То/2, и коррекция в основном кольце подстройки происходит без ошибок.
Формула изобретения
Устройство для измерения временного положения импульса до .авт.св. № 576553, о т л и ч а ю.щ е е.с я Тем, что, с целью повышения точности измерения временного положения импульса , в устройство дополнительно введены последовательно соединенные
блок вычитания, первый усилительограничитель, фазовый детектор, интегратор и аттенюатор,,а также второй, усилительтограничитель и источник опорного .напряжения, подключен-: ный к аттенюатору,, выход которого соединен со вторым входом режекторного фильтра,.своим выходом, подключенного .к первому входу блока вычитания, второй вход которого .соединен с выходом полосового фильтра..и со входом второго усилителя-ограничителя, выход которого подключен ко второму входу фазового детектора.
Источники информации, принятые во вннмание при экспертизе
1. Авторское свидетельство СССР 576553, кл. G 01 S 3/10, 06.01.76 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения вре-МЕННОгО пОлОжЕНия иМпульСА | 1979 |
|
SU798658A2 |
| Устройство для измерения временногопОлОжЕНия иМпульСА | 1979 |
|
SU836610A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU951214A2 |
| Устройство для измерения временного положения импульса | 1982 |
|
SU1071985A2 |
| Устройство для измерения временного положения импульса | 1980 |
|
SU934401A2 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU976427A1 |
| Устройство для измерения временного положения импульса | 1981 |
|
SU958996A2 |
| Устройство для измерения временного положения импульса | 1989 |
|
SU1709267A2 |
| Устройство для измерения временного положения импульса | 1978 |
|
SU769484A2 |
| Устройство для измерения временного положения импульса | 1978 |
|
SU741212A1 |
Й/2.2 Фиг.5 i -Af MKCCK.
