(54) ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации влияния помех на динамические свойства автоматических систем с ограничением | 1974 |
|
SU540255A1 |
| Нелинейное корректирующее устройство для динамических систем с ограничением | 1975 |
|
SU603949A1 |
| Устройство для компенсацииОгРАНичЕНия | 1974 |
|
SU809043A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| Привод | 1974 |
|
SU732800A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Система управления | 1983 |
|
SU1167578A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
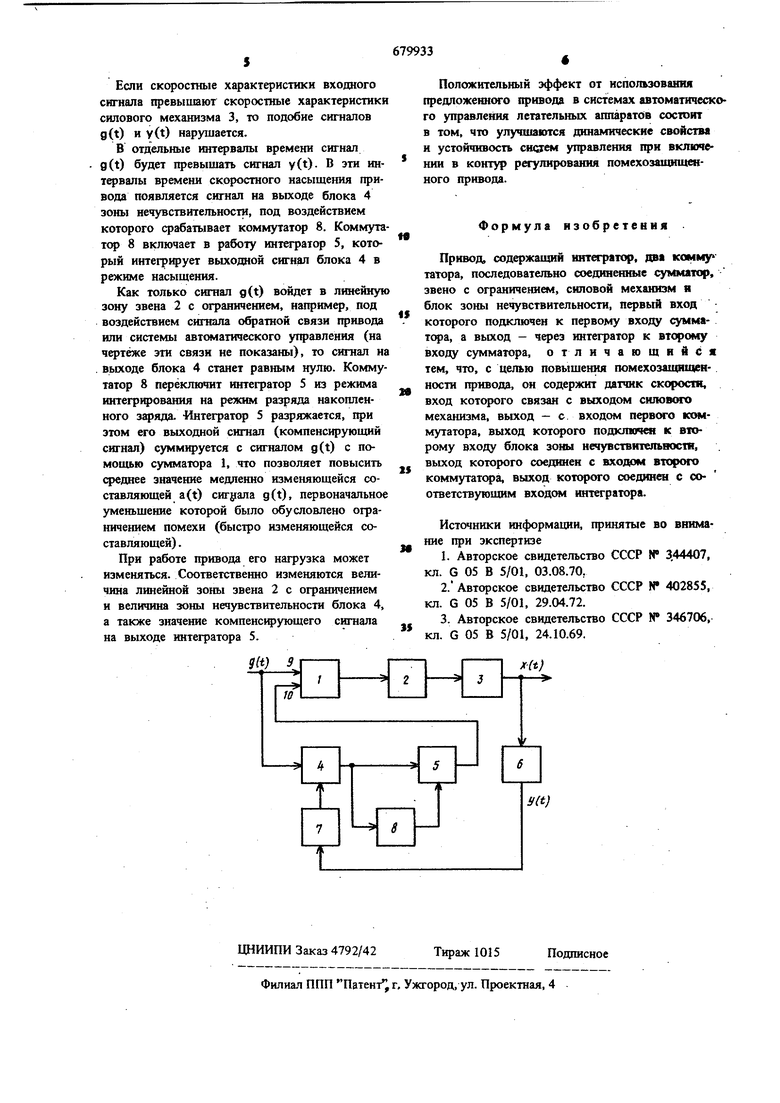
Изобретение относится к области систем автоматического управления и может быть использовано в системах управления летательными аппаратами, содержащих исполнительные устройства с ограиичением скорости Изменеиия выходной величины и подверженных воздействию помех. Известеи привод, в котором для компеисации отрицательного влияния ограничения ско рости измеиеиия выходной величины используются блок с зоной нечувствительности, сумматор, звено с ограничителем и модель звена с ограничением {1}. Недостаток известного привода состоит в том, что расширение линейного участка звена с ограничением осуществляется путем дополнительного подключения параллельно звену с ограничением его модели в режиме насыщения скорости изменения выходной величины. Сумма ная выходная величина превышает зону ограничения, что повышает помехозащищенность привода, так как быстро изменяющиеся состав дяющие выходного сигнала привода не ограничиваются по скорости. Однако реализащш таких устройств требует либо увеличения мощности исполнительного органа, либо установки нескольких исполнительных органов первоначальной мощности, что практически трудно осуществить, например, на летательном аппарате, где ограничены не только габариты, но и вес исполнительных органов системы управления. Известен другой привод, в котором установлены устройства для компенсащ1И помех, звено с ограничением, суммирующий интегратор и реле с уровнем срабатывания, равным уровню ограничения; 2. Его недостаток, заключается в том, что величина уровня ограничения задается заранее и не изменяется в процессе работы привода. Величина ограничения скорости изменения выходного вала привода зависит от нагрузки на всем интервале ее нзменения. Нагрузка на выходном валу привода может изменяться в широком диапазоне. Наиболее близким к изобретению по технической сущности является привод, содержащий интегратор, два коммутатор, последовательно соединенные сумматор, с ограничением. силовой механизм и блок зоны нечувствительности, первый вход кот(ого подключен к первому входу сумматора, а выход - через интегратор ко второму входу сумматора 3. Недостаток его состоит в том, что уровень срабатывания порогового элемента не зависят от уровня ограничения звена с ограничением. Кроме того, в известном устройстве возможно ложное фабатывание порогового элемента под действием выходного сигнала интегратора. Указанные недостатки снижают помехозащиЫенность привода с ограниченной скоростью изменения выходного вала. Целью изобретения является повышение помехозащищенности прнвода при обработке сигналов управления, засоренных помехой и быстро изменяющимися составляющими. Указанная цель достигается тем, что привод содержит датчик скорости, вход которого связан с вььходом силового механизма, выход соединен с входом первого коммутатора, выход которого подключен к второму входу блока зоны нечувствительности, выход которого связан с входом, второго коммутатора, выход которого соединен с соответствующим входом интегратора. На чертеже изображена блок-схема привода. Она содержит сумматор 1, звено 2 с ограничением, силовой механизм 3, блок 4 зоны нечувствительности, интегратор 5, датчик скорости 6, коммутаторы 7 и 8, входы 9 и 10 сумматора 1. Принцип действия гривода состоит в следующем. Величина зоны нечувствительности блока зоны нечувствительности изменяется в прямой зависимости от уровня насыщения звена с ограничением. За счет зтого сформированный на выходе интегратора компенсирующий сигнал пропорционален ограниченной части входного сигнала звена с ограничением, что, в свою очередь, позволяет повысить среднее значение выходного сигнала звена с ограничением при суммировании компенсирующего сигнала с входным сигналом привода и скомпенсировать тем самым ограничение скорости нзменения выходной величинь привода. Помехозащищенность привода повышается, так как отрицательное влияние ограничения скорости изменения выходной величины привода, обусловленное наличием в сигнале управления помехи и быстро изменяющихся составляющих, скомпенсировано за счет дополнительного увеличения времени нахождения привода в состоянии ограничения (насыщения) по скорости. Входной управляющий сигнал g(t), состоящий из алгебраической суммы медленно изменяющегося сигнала a(t) и быстро изменяющейся составляю щей Z (t), поступает на вход 9 сумматора 1 и на вход блока 4 зоны нечувствительности. Примером такого сигнала g(t) может быть ущ)авляющий сигнал системы управления летательным аппаратом, где медленно изменяющейся составляющей a(t) является сигнал, соответствуюиий движению центра массы летательного аппарата, а быстро изменяющейся составляющей 2 (t) является сигнал углового движения летательного аппарата относительно его центра массы. Выход сумматора 1 через звено 2 с ограничением соединен со входом силового механизма 3 привода. Зона ограничения 2 соответствует величине ограничения скорости изменения выходного вала силового механизма 3. Выход блока 4 зоны нечувствительности подключен через интегратор 5 ко входу 10 сумматора 1. Величина зоны нечувствительности блока 4 пропорцио гальна зоне насыщения звена 2. Эта пропорциональность зоны нечувствительности блока 4 и зоны ограничения звена 2 осуществляется с помощью коммутатора 7, управляющий вход которого свйзан через датчик скорости 6 с выходным валом силового механизма 3. Включегше интегратора 5 в работу и приведение его в исходное положение (разряд накопленного заряда) осуществляется с помощью коммутатора 8, управляющий вход которого подключен к выходу блока 4 зоны нечувствительности. Привод работает следующим образом. Если скорость изменения входного сигнала g(t) не превышает скоростных возможностей силового механизма 3, то сигнал на выходе датчика 6 скорости не имеет участков с насыщением и подобен сигналу g (t). Выходной сигнал датчика скорости 6 поступает на вход коммутатора 7, который может быть выполнен в виде набора релейных поляризованных элементов с разными уровнями срабатывания. Контакты этих релейных элементов осуществляют изменение величины зоны нечувствительности блока 4. В идеальном случае, когда силовой механизм является интегрирующим звеном, привод работает в режиме максимальной нагрузки и отсутствует скоростное ограничение, то входной сигнал g(t) и выходной сигнал y(t) датчика скорости 6 пропорциональны между собой и сигнал g(t) через блок зоны нечувствительности 4 не проходит. Коммутатор 8 не срабатывает. Интегратор 5 не интегрирует свой входной сигнал. Компенсирующий сигнал с выхода интегратора 5 на вход 10 сумматора 1 не поступает т.к. ограничению скорости изменения как медленно изменяющей a(t), как быстро изменяющей 2 (t) составляющих, суммарный сигнал g{t) не подвергается.
Если скоростные характеристики входаого сигнала превышают скоростные характеристики силового механизма 3, то подобие сигналов g(t) и y(t) нарушается.
В отдельные интервалы времени сигнал g(t) будет превышать сигнал y(t). В эти интервалы времени скоростного насыщения привода появляется сигнал на выходе блока 4 зоны нечувствительности, под воздействием которого срабатывает коммутатор 8. Коммутагор 8 включает в работу интегратор 5, который интегр фует выходной сигнал блока 4 в режиме насыщения.
Как только сигнал g(t) войдет в линейную зону звена 2 с ограничением, например, под воздействием сигнала обратной связи привода или системы автоматического управления (на чертеже эти связи не показаны), то сигнал на . выходе блока 4 станет равным нулю. Коммутатор 8 переключит интегратор 5 из режима интегрирования на режим разряда накопленного эаряр. Интегратор 5 разряжается, при этом его выходной сигиал (компенсирующий сигнал) суммируется с сигналом g(t) с помощью сумматора 1, что позволяет повысить q eднee значение медленно изменяющейся составляющей a(t) сигнала g(t), первоначальное уменьшение которой было обусловлено ограничением помехи (быстро изменяющейся составляющей) .
При работе привода его нагрузка может измеияться. Соответственно изменяются величина линейной зоны звена 2 с ограничением и величина зоны нечувствительности блока 4, а также зиачение компеис)фующего сигнала на выходе интегратора 5.
Положительный эффект от использования предложенного привода в системах автоматического управления летательных аппаратов состоит в том, что улучшаются динамические свойства и устойчивость систем управления при включении в контур регулирования помехозашищеяного привода.
Формула изобретения
Привод, содержащий интегратор, два комму татора, последовательно соединенные сумматор, звено с ограничением, силовой механизм я блок зоны нечувствительности, первый вход которого подключен к первому входу суммагарл, а выход - через интегратор к второму входу сумматора, отличающийся тем, что, с целью повышения помехозащищенности привода, он содержит датчик скоростн, вход которого связан с выходом силов(нх механизма, выход - с входом коммутатора, выход ПОДКЛЮЧИ к второму входу блока зоны нечувствкгельностя, выход которого соединен с входом второго коммутатора, выход которого соединен с соответствующим входом интегратора.
Источники информацни, принятые во внимание при экспертизе
