Предлагаемое изобретение относится к области нелинейных систем автоматическогр управления (САУ) ъ может быть использовано в системах автоматического управления летательных анпаратов, содержащих элементы с ограничением и подверженных воздействию помех.
В системах с ограничением возможно забитие усилительного тракта помехой, которое может привести к ухудшению динамических свойств САУ.
Известны способы влияния помех. Одним из известных решений является -спо-соб, Основанный на вычитании сформированного компенсирующего сигнала из управляющего сигнала и получения тем самым форсировки управляющего сигнала.
Недостаток этого способа состоит в том, что, если частота помехи, например первый тон упругих колебаний корпуса беспилотного летательного аппарата, близка к частоте полезного сигнала, то в процессе компенсации (вычитания) увеличиваются скорость изменения и амплитуда управляющего сигнала, что требует улучшения скоростной характеристики рулевого привода и расширения диапазона возможных перегрузок.
Улучшение скоростных характеристик 1 улеВого привода связано с увеличением его мощности, а увеличение перегрузок требует упрочнения корпуса летательного аппарата, что трудно технически реализуемо, так как повышается вес рулевого привода и корпуса летательного аппарата.
Наиболее близким техническим решением к данному изобретению является способ компенсации влияния Помех на динамические свойства систем с ограничением, основанный на сравнении управляющего сигнала, содержащего помеху, с сигналом, пропорциональным величине ограничения, интегрировании разностного сигнала и его запоминании.
Недостатком известного способа является то, что суммирование дополнительно сформированного компенсирующего сигнала (разряда интегратора) с управляющим сигналом приводит к появлению отрицательного фазового сдвига управляющего сигнала, содержащего помеху, параметры которой близки к параметрам полезного сигнала. Отрицательный фазовый сдвиг управляющего сигнала ухудшает динамические свойства САУ.
Целью настоящего изобретения Является повышение точности комненсации при достиже5 НИИ параметров помехи, близких к параметрам полезного сигнала.
Поставленная цель достигается тем, что дифференцируют управляющий сигнал при выходе его из зоны ограничения и вычитают
D запомненный проинтегрированный сигнал из
управляющего сигнала с момента равенства нулю продЕфферен-цированного сигнала до момента равенства нулю проинтегрированного сигнала.
В результате roiro, что вычитание компенсиг .рующего сигнала -из управляющего осуществляется в момент возрастания амплитуды помехи, сглаживается управляющий сигнал, снижаются требования к скоростной характеристике рулевого привода И допустимой -перегрузке, а образующееся фазовое опережение (форсировка) улучщает динамические свойства САУ с ограничением.
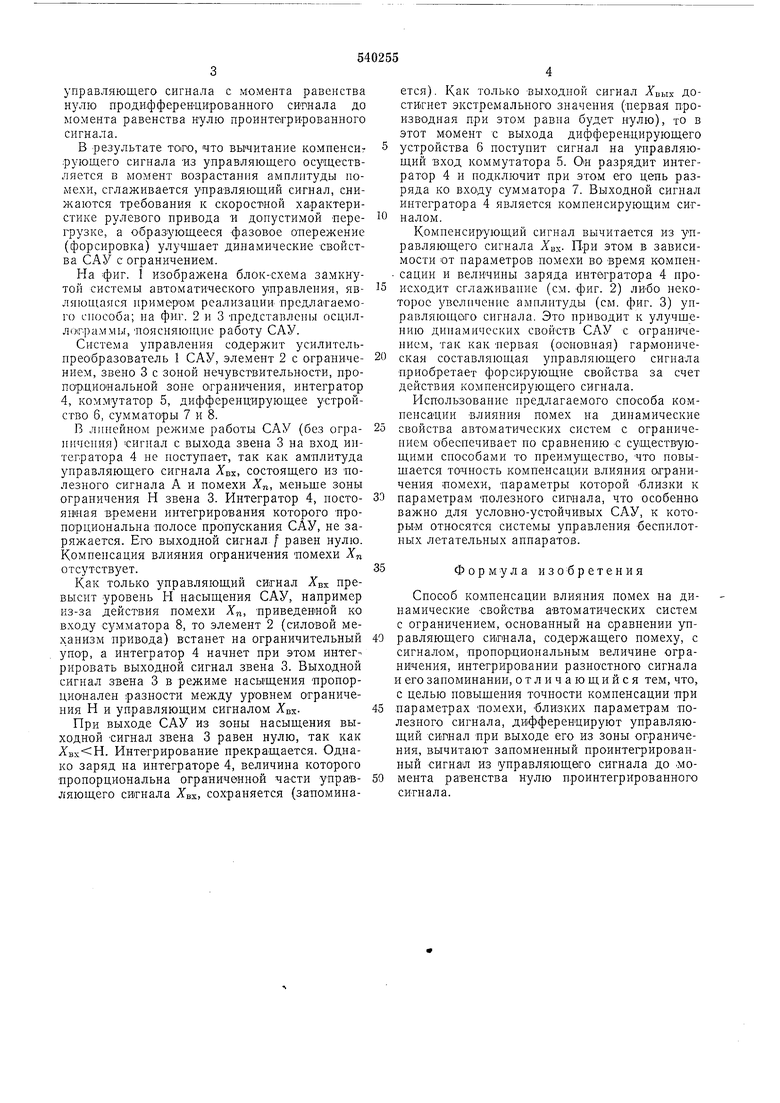
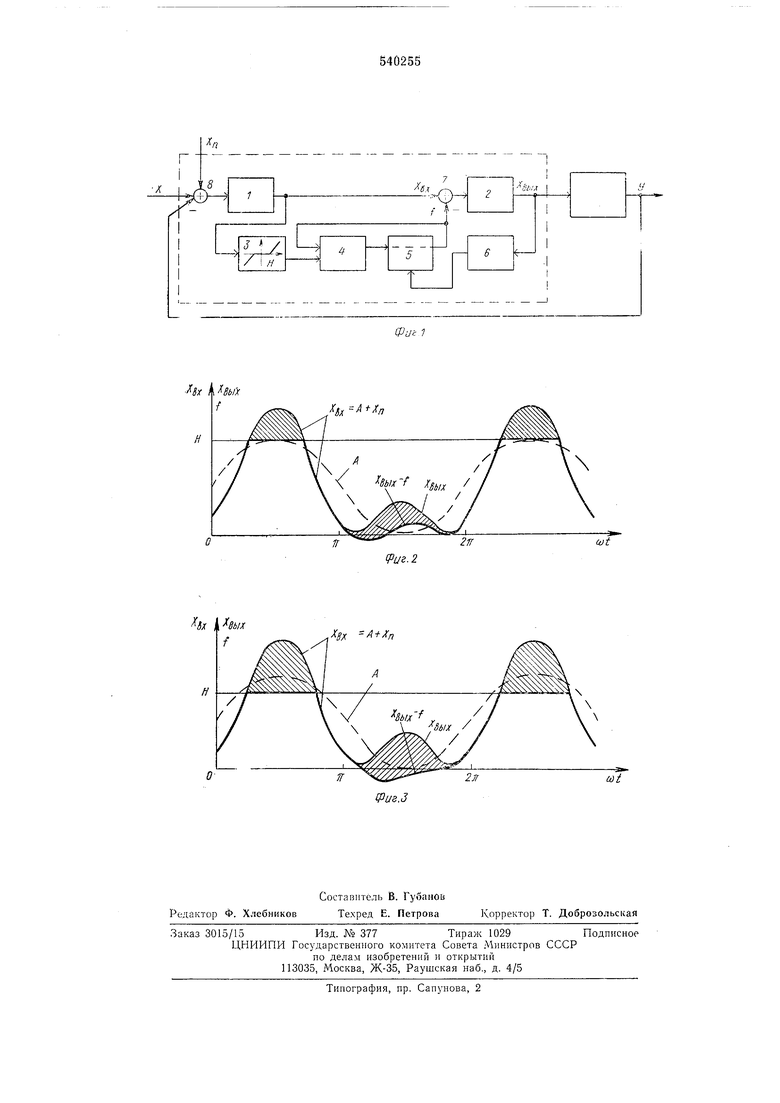
На фиг. 1 изображена блок-схема замкнутой системы автоматического управления, являющаяся примером реализации предлагаемого способа; па фиг. 2 и 3 представлены осциллограммы,поясняющие работу САУ.
Система управления содержит усилительпреобразователь 1 САУ, элемент 2 с ограничением, звено 3 с зоной нечувствительности, пропордиояальной зоне ограничения, интегратор 4, коммутатор 5, дифференцирующее устройство 6, сумматоры 7 и 8.
В линейном режиме работы САУ (без ограничения) -сигнал с выхода звена 3 на вход интегратора 4 не поступает, так как амплитуда управляющего сигнала Авх, состоящего из полезного сигнала А и помехи Хп, меньше зоны ограничения Н звена 3. Интегратор 4, постоявная времени интегрирования которого Пропорциональна полосе пропускания САУ, не заряжается. Его выходной сигнал f равен нулю. Компенсация влияния ограничения помехи Хп отсутствует.
Как только управляющий сигнал .Хвх превысит уровень Н насыщения САУ, например из-за действия помехи Хп, приведенной ко входу сумматора 8, то элемент 2 (силовой мех.анизм привода) встанет на ограничительный упор, а интегратор 4 начнет при этом интегрировать выходной сигнал звена 3. Выходной сигнал звена 3 в режиме насыщения пропорционален разности между уровнем ограничения Н и управляющим сигналом АвхПри выходе САУ из зоны насыщения выходной Сигнал звена 3 равен нулю, так как .. Интегрирование прекращается. Однако заряд на интеграторе 4, величина которого пропорциональна ограниченной части управляющего сигнала Хвх, сохраняется (запоминается). Как только выходной сигнал вых достигнет экстремального значения (первая нроизводиая при этом равиа будет цулю), то в этот момент с выхода дифференцирующего устройства 6 поступит сигнал на управляющий вход коммутатора 5. Оч1 разрядит интегратор 4 и подключит при этом его цепь разряда ко входу сумматора 7. Выходной сигнал интегратора 4 является компенсирующим сигналом.
Компенсирующий сигнал вычитается из управляющего сигнала Хц. При этом в зависимости от параметров помехи во Время компенсации и величины заряда интегратора 4 происходит сглал ивание (см. фиг. 2) либо некоторое увеличение амплитуды (см. фиг. 3) управляющего сигиала. Это приводит к улучщению динамических свойств САУ с ограничением, так как первая (основная) гармопичеекая составляющая управляющего сигнала приобретает форсирующие свойства за счет действия компеисирующего сигнала.
Использование предлагаемого способа компенсации влияния помех иа динамические
свойства автоматических систем с ограничением обеспечивает по сравнению с существующими способами то преимущество, Что повыщается точность компенсации влияния ограничения помехи, Параметры которой близки к
параметрам полезного сигнала, что особенно важно для условно-устойчивых САУ, к которым относятся системы управления беспилотных летательных аппаратов.
Формула изобретения
Способ компенсации влияния помех на динамические Свойства автоматических систем с ограничением, основанный на сравнении управляющего сигнала, содержащего помеху, с сигналом, пропордиональным величине ограничения, интегрировании разностного сигнала и его запоминании, отличающийся тем, что, с целью повыщения точности компенсации при
параметрах помехи, близких параметрам полезного сигнала, дифференцируют управляющий сИрнал при выходе его из зоны ограничения, вычитают запомненный проинтегрированный сигнал из управляющего сигнала до .момента равенства нулю проинтегрированного сигнала.
е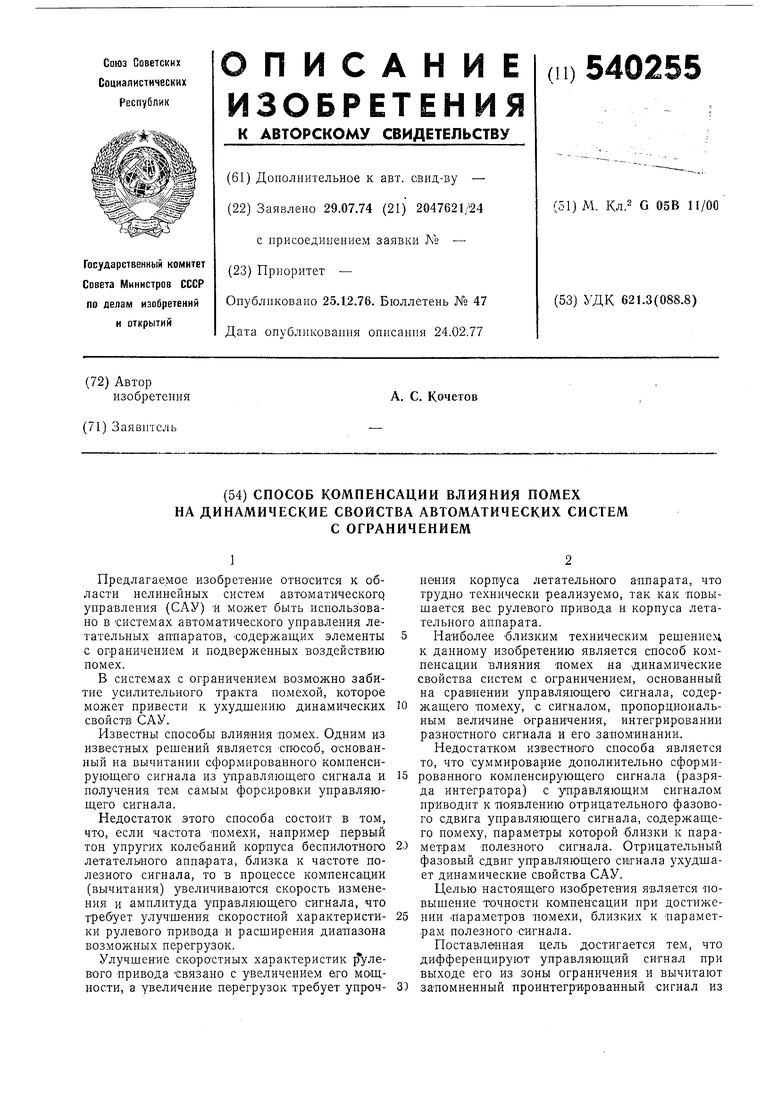
| название | год | авторы | номер документа |
|---|---|---|---|
| Непрерывный привод | 1989 |
|
SU1734071A2 |
| Нелинейное корректирующее устройство для динамических систем с ограничением | 1975 |
|
SU603949A1 |
| Устройство для компенсацииОгРАНичЕНия | 1974 |
|
SU809043A1 |
| Устройство регулирования системы с ограничением | 1975 |
|
SU1040464A1 |
| Способ компенсации влияния помех во входном сигнале | 1972 |
|
SU463093A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Привод | 1977 |
|
SU679933A1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
SK I
ff
(tit
