(54) СПОСОБ УПРАВЛЕНИЯ АСИНХРОННОи-ВЕНТИЛЬНЫМ КАСКАДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| АСИНХРОННО-ВЕНТИЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙКАСКАД | 1968 |
|
SU219690A1 |
| УСТАНОВКА ДЛЯ ПИТАНИЯ АВТОНОМНЫХ ОБЪЕКТОВ | 1969 |
|
SU233050A1 |
| Асинхронно-вентильный частотнорегулируемый каскад | 1976 |
|
SU633126A2 |
| ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1995 |
|
RU2094938C1 |
| Установка для питания автономных объектов | 1977 |
|
SU720619A1 |
| Стенд для испытания механических передач | 1983 |
|
SU1153251A1 |
| Способ управления @ -фазным преобразователем частоты с непосредственной связью | 1982 |
|
SU1171953A1 |
| Способ регулирования скорости электрического рабочего вала | 1971 |
|
SU545057A1 |
| ЭЛЕКТРОПРИВОД | 1970 |
|
SU262258A1 |
| Непосредственный преобразователь частоты | 1990 |
|
SU1750002A1 |
Изобретение относится к электротехнике и может быть использовано при разряботке асинхронно-вентильных каскадов, предназначенных для двухзонного регулирования скорости асинхронного двигателя.
Известны способы двухзонпого регулирования скорости в асинхронно-вентильных каскадах, обмотки ротора в которых питаются как от преобразователей частоты со звеном постоянного тока, так и от преобразователей частоты с непосредственной связью (НПЧ).
Известен способ управления асинхронновентильным каскадом с преобразователем частоты со звеном постоянного тока, позволяющий получить двухзонное регулирование 1.
Получение двухзонного регулирования в рассматриваемом случае принципиально возможно, если в роторной цепи имеются два выпрямительных моста на управляемых венти;1ях (тиристорах). При работе в нижесинхронной области мост, подключенный к ротору, переводится в выпрямительный режим, а мост, подключенный к сети, - в инверторный. ,В области от точки «естественного скольжения до синхронной скорости режимы работы мостов меняются на противоположные.
При синхронной скорости мост, подключенный к сети, работает в выпрямительном режиме, а в мосте, подключенном к ротору, постоянно включаются два или три вентиля. При выше синхронной скорости мост, подключенный к ротору, переводится в инверторный режим, а второй мост - в выпрямительный.
Однако описанный способ управления в случае применения серийных двигателей практически непригоден для двухзонного регулирования скорости, так как при малых частотах ротора в кривой ЭДС ротора зубцовые гармонические становятся больше основной гармоники, поэтому работа выпрямительного моста в режиме зависимого инвертора при околосинхронной скорости практически невозможна. Переход через синхронную скорость без введения искусственной коммутации вентилей также невозможен, так как ЭДС в роторе на синхронной скорости отсутствует. Таким образом, хотя принципиально здесь и возможно двухзонное регулирование скорости, практическое его осуществление очень затруднительно, а некоторь1е режимы во всем диапазоне регулирования вообще невозможны.
Известен способ управления, в котором для
осуществления двухзонного регулирования скорости в роторной цепи применен 11114, а способ управления асинхронно-вентильным каскадом заключается в следующем 2. Все режимы работы каскада определяются переключателем режима работы, имеюн1ем четыре положения: «пижесинхрониая скорость, «спнхроиизм, «переход через синхронизм, «вьинесинх ронная скорость.
В первом положении переключателя на вход системы управления (СУ) НПЧ напряжение подается от неавтономного генератора (датчика скольжения), во втором положении на вход СУ НПЧ подается постоянное напряжение, i; третьем - напряжение от автономного генератора низкой частоты и в четвертом - снова от неавтономного генератора. Описанный способ управления позволяет осуидествить переход через синхронную скорость и обеспечить двухзонное регулирование скорости в асинхронно. вентильно.м каскаде.
Недостатком способа является отсутствие плавного регулирования в режиме двойного питания асинхронного двигателя и трудности в его реа.1изаиии ввиду весьма низкой (доли Ги) частоты автономного генератора. Это сужает возможности в выборе более оптимального режима работы электропривода в зависимости от характера нагрузки и требований, которые к нему иредъявляются.
Целью изобретения является расширение диапазона п.лавного регулирования скорости.
Это достигается тем. что при способе автоматического управления асинхронно-вентильным каскадом, выполненным но схеме с преобразователе.м частоты на полностью управляемых ключевых элементах и с циклическим алгоритмом работы, заключающемся в сравнении частот напряжения обмотки статора f |, неавтономного генератора i-, и автономного генератора, частоту автономного генератора выбирают равной f,- Д) и при f| l2 f I -- Д имиульсы управления на указанный преобразователь иодают от автономного генератора, а при 1| ts fi + Д1 - от неавтономного i енератора.
Сущность предлагаемого способа состоит в с.гедующем.
Известно, что основная гармоника выходного напряжения преобразователей частоты с циклическим алгоритмом управления определяется с помощью выражения 3
.c-cos(a-,)t (О
где г-1 - для нулевой схемы; - для мостовой схемы; -1 - угловая частота переключения силовых ключевых элементов;
U3 I - угловая частота питающей. Таким образом, частота первой гармоники выходного напряжения преобразователя равна разности частот коммутации л, и питающей сети OJ |. Это обстоятельство позволяет весь.ма просто сформировать е достаточно высокой степенью точности ианряжение частоты скольжения, есяя U I - это ча(;тота напряжения питания ста гора, НА - пропорциональна скорости ротора.
При переходе через синхронную -корость (когда л становится больще m j), как с.1едует г;,; ), .меняется знак чаетоты. т. е. порядок 5 чередования фаз выходного напряжения изменяется на противоположный, что необходимо при выщесинхронной скорости. Если полава:ь в преобразователь частоты импульсы yiipaii.ieния от автономного генератора, выбрав частоQ ту равной и предусмотреть ее регулировку, то можно легко осуществлять плавное изменение скорости двигателя в режиме .твойного питания.
Регулирование чаетоты автономного генератора f I + Af можно сов.местить с регулированп5 е.м выходного напряжения ПЧ (sin (i-var), обеспечивая таким образом как асинхронный режим работы двигателя, так и режим двойного гпггания регулирования скорости, устанавливая диапазоны плавного регулирования j скорости в этих режимах в завиеи.мости от коикретных требований к электроприводу.
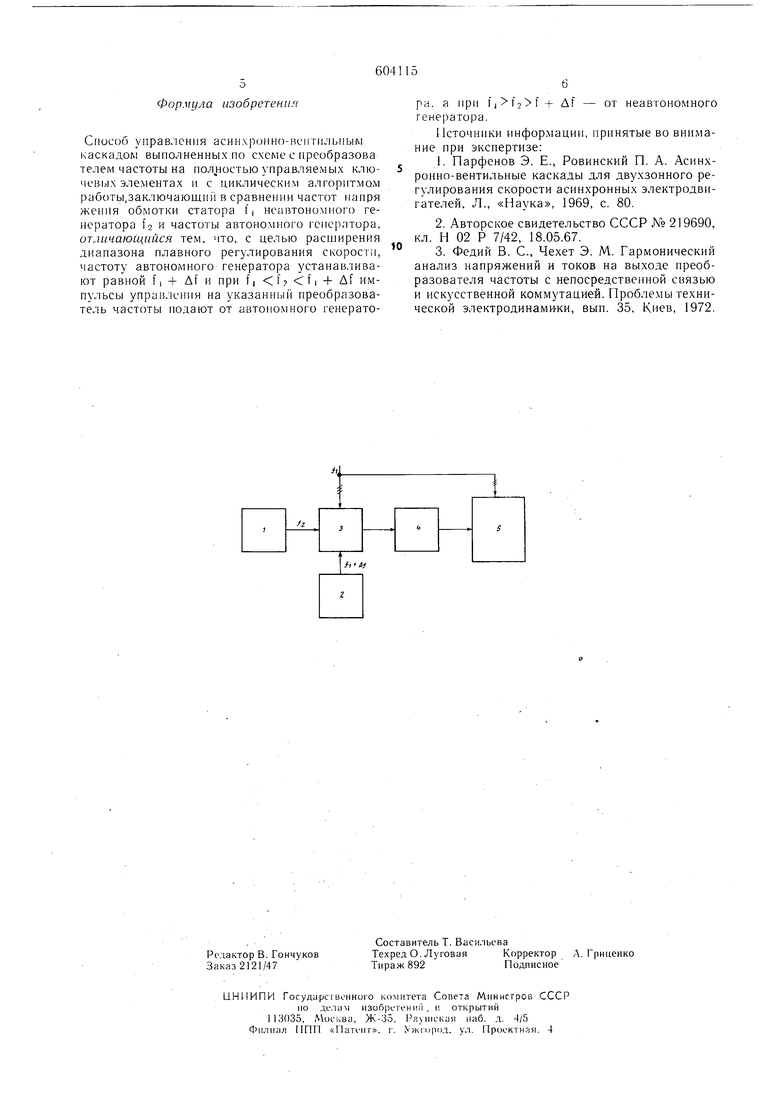
На чертеже изображена структурная схема, реализующая предлагаемый способ.
Напряжения чаетоты сети , неавтономного генератора 1 (синхронный тахогенератор) с частотой f2 автоно.много генератора частоты fj + .+ Afj сравниваются по частоте в блоке сравнения 3. Если j fi на вход формирователя импульсов 4 через блок сравнения 3 подается напряжение неавтономного генератора, на выходе ПЧ 5 формируется напряжение е часто0той скольжения, вводимое в виде добавочной ЭДС в цепь ротора. Изменяя ее величину, т.е. регулируя sin а, можно изменять скорость э.1ектродвигателя.
При через блок сравнения 3 на вход формирователя 4 подается напряжение с автоHOMHoio генератора с частотой f| + Af, двигатель работает в режиме двойного питания, ротор питается частотой At, а скорость его
Г, 60
40 плавно из.меняется от величины
(Ь -1-М)60
до
Регулирование чаетоты автономного генератора может быть совмещено с регулированием выходного напряжения ИЧ, а диапазон работы двигателя в режиме двойного питания можно установить в зависимости от конкретных требований, предъявляемых к электроприводу.
При + Af через блок сравнения в формирователь 4 снова подается напряжение с неавтономного генератора и электродвигатель работает в асиихронном режиме с выщесинхронной скоростью.
Таким образом, предлагаемый способ позволяет оеуществлять плавное регулирование скорости во всех режи.мах раб() асинхронновентильного каскада, обеспечивая необходимые диапазоны ее изменения.
Формула изобретения
Способ управления асии.j:i()Hно-вентильным каскадом выполненных по схеме спреобразова телем частоты на полностью управляемых ключевых элементах и с циклическим алгоритмом работы,заключающи всравиеиии частот иаиря жеиия обмотки статора f| неавтономиогч) генератора fa и частоты автономного генератора, отличающийся тем, что, с целью расширения диапазона плавного регулирования скорости, частоту автономного генератора устанавливают равной | + Af и при f, f f| + Af импульсы управления на указанный преобразователь частоты иодают от автономного генератоб
ра. а при f,
Af
от неавтономного генератора.
Источники информации, принятые во внимание при экснертизе:
