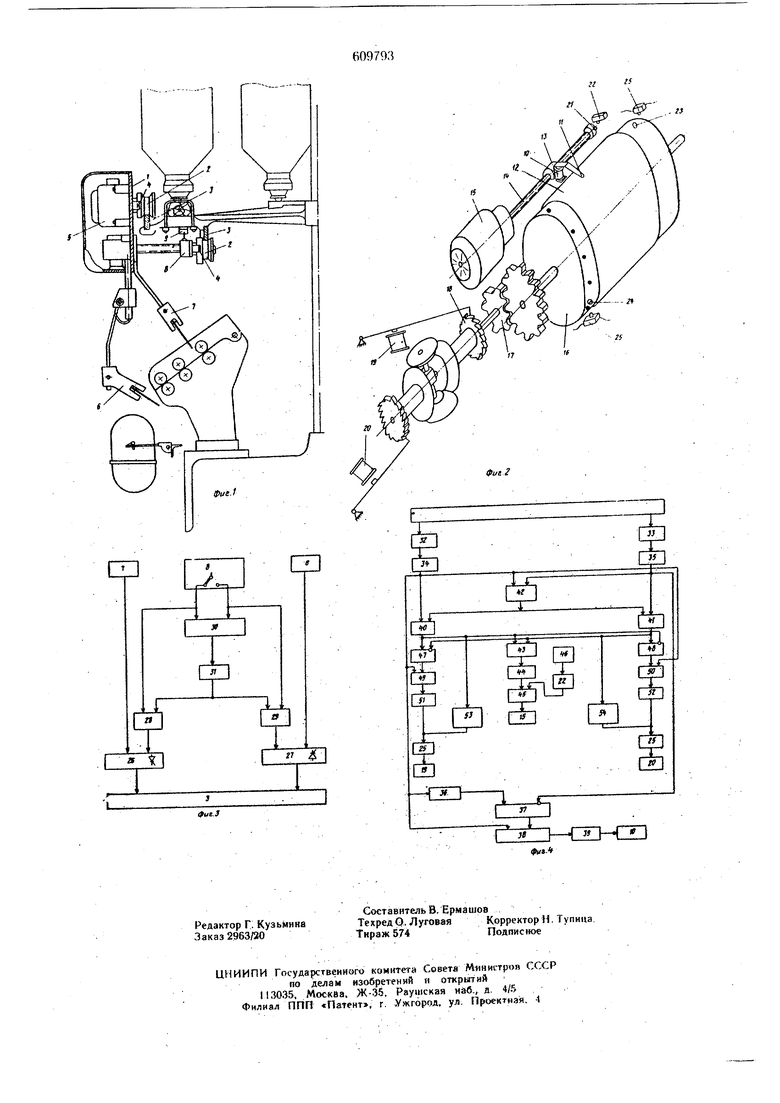
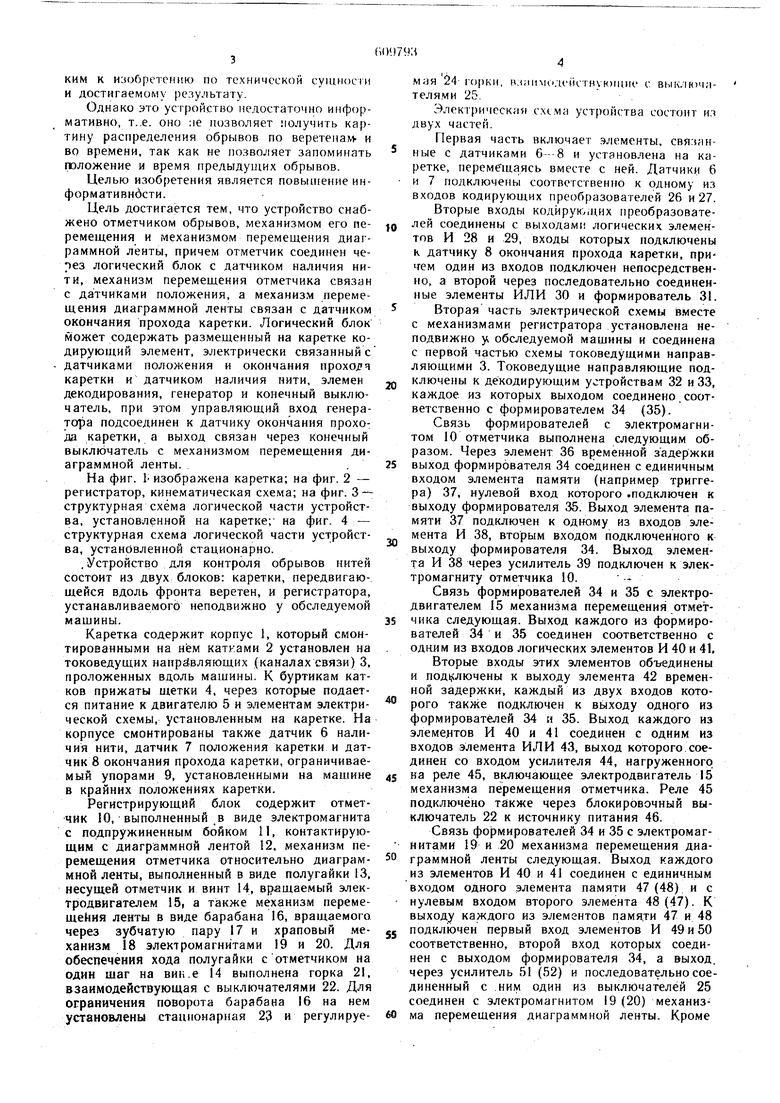
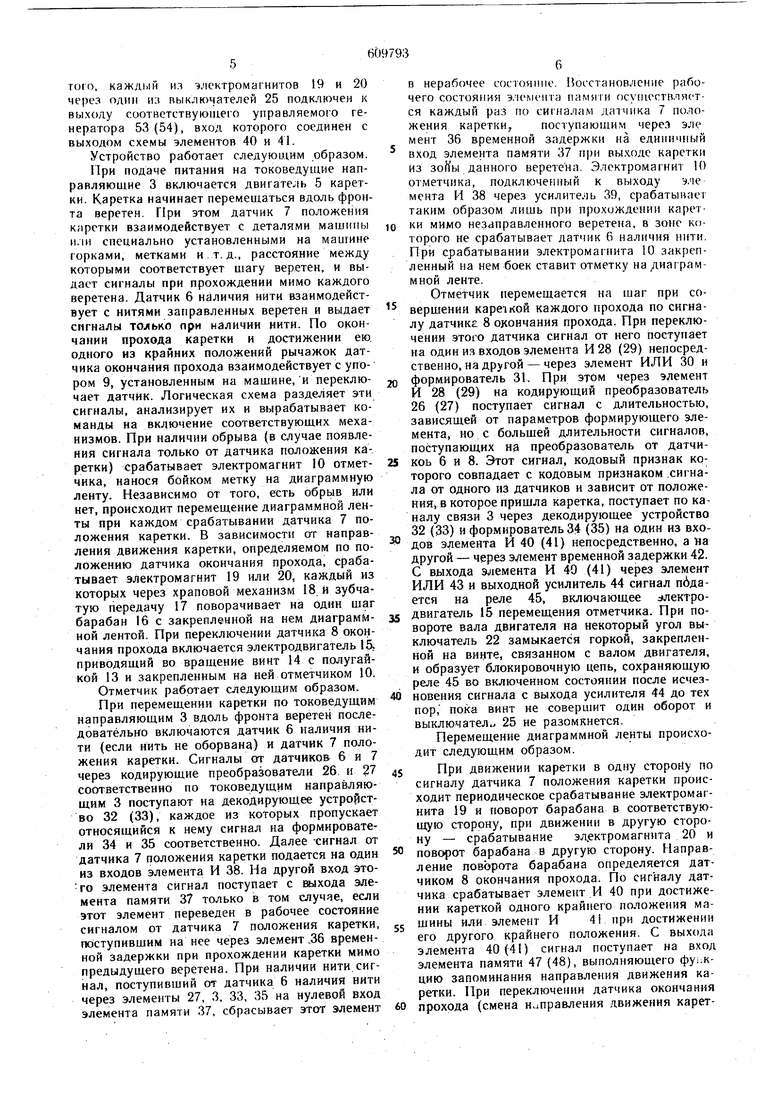
КИМ к изобретению по технической сушносги и достигаемому результату. Однако это устройство недостаточно информативно, т..е. оно ;ie позволяет получить картину распределения обрывов по вepeтeнa и во времени, так как не позволяет запоминать положение и время предыдущих обрывов. Целью изобретения является повышение информативндсти. Цель достигается тем, что устройство снабжено отметчиком обрывов, механизмом его перемещения и механизмом перемещения диаграммной ленты, причем отметчик соединен через логический блок с датчиком наличия нити, механизм перемещения отметчика связан с датчиками положения, а механизм перемещения диаграммной ленты связан с датчиком окончания прохода каретки. Логический блок может содержать размещенный на каретке кодирующий элемент, электрически связанный с датчиками положения и окончания прохолч каретки и датчиком наличия нити, элемен декодирования, генератор и конечный выключатель, при этом управляющий вход генератора подсоединен к датчику окончания прохода каретки, а выход связан через конечный выключатель с механизмом перемещения диаграммной ленты.. На фиг. 1-изображена каретка; на фиг. 2 - регистратор, кинематическая схема; на фиг. 3 - структурная схема логической части устройства, установленной на каретке; на фиг. 4 - структурная схема логической части устройства, установленной стационарно. , Устройство для контроля обрывов нитей состоит из двух блоков: каретки, передвигающейся вдоль фронта веретен, и регистратора, устанавливаемого неподвижно у обследуемой мащины. Каретка содержит корпус 1, который смонтированными на нем катками 2 установлен на токоведущих направляющих (каналах связи) 3, проложенных вдоль машины. К буртикам катков прижаты щетки 4, через которые подается питание к двигателю 5 и элементам электрической схемы, установленным на каретке. На корпусе смонтированы также датчик 6 наличия нити, датчик 7 положения каретки и датчик 8 окончания прохода каретки, ограничиваемый упорами 9, установленными на мащине в крайних положениях каретки. Регистрирующий блок содержит отметчик 10, выполненный ,в виде электромагнита с подпружиненным бойком 11, контактирующим с диаграммной лентой 12. механизм перемещения отметчика относительно диаграммной ленты, выполненный в виде полугайки 13, несущей отметчик и винт 14, вращаемый электродвигателем 15, а также механизм перемещейия ленты в виде барабана 16, вращаемого через зубчатую пару 17 и храповый механизм 18 электромагнитами 19 и 20. Для обеспечения хода полугайки с отметчиком на один шаг на вин.е 14 выполнена горка 21, взаимодействующая с выключателями 22. Для ограничения поворота барабана 16 на нем установлены стационарная 23 и регулируемая 24- горки, вл;1и к1.-цчктнук)1111Н с. вык.-1Н)ч;|телями 25. Электрическая с.хсма устройства состоит и.ч двух частей. Первая часть включает элементы, свя: г1нные с датчиками 6--8 и установлена на каретке, перемещаясь вместе с ней. Датчики 6 и 7 подключены соответственно к одному из входов кодирующих преобразователей 26 и 27. Вторые входы кодирующих преобразователей соединены с выходами логических элементов И 28 и 29, входы которых подключены к датчику 8 окончания прохода каретки, причем один из входов подключен непосредственно, а второй через последовательно соединенные элементы ИЛИ 30 и формирователь 31. Вторая часть электрической схемы 1вместе с механизмами регистратора установлена неподвижно у. обследуемой мащины и соединена с первой частью схемы токоведущими направляющими 3. Токоведущие направляющие подключены к декодирующим устройствам 32 и 33, каждое из которых выходом соединено соответственно с формирователем 34 (35). Связь формирователей с электромагнитом 10 отметчика выполнена следующим образом. Через элемент 36 временной задержки выход формирователя 34 соединен с единичным входом элемента памяти (например триггера) 37, нулевой вход которого .подключен к выходу формирователя 35. Выход элемента памяти 37 подключен к одному из входов элемента И 38, вторым входом подключенного к выходу формирователя 34. Выход элемента И 38 через усилитель 39 подключен к электромагниту отметчика 10. Связь формирователей 34 и 35 с электродвигателем 15 механизма перемещения отметчика следующая. Выход каждого из формирователей 34 и 35 соединен соответственно с одним из входов логических элементов И 40 и 41, Вторые входы этих элементов объединены и под1; лючены к выходу элемента 42 временной задержки, каждый из двух входов которого также подключен к выходу одного из формирователей 34 н 35. Выход каждого из элементов И 40 и 41 соединен с одним из входов элемента ИЛИ 43, выход которого соединен со входом усилителя 44, нагруженного на реле 45, включающее электродвигатель 15 механизма перемещения отметчика. Реле 45 подключено также через блокировочный выключатель 22 к источнику питания 46. Связь формирователей 34 и 35 с электромагнитами 19 и 20 механизма перемещения диаграммной ленты следующая. Выход каждого из элементов И 40 и 41 соединен с единичным входом одного элемента памяти 47(48) и с нулевым входом второго элемента 48(47). К выходу каждого из элементов памяти 47 и 48 подключен первый вход элементов И 49 и 50 соответственно, второй вход которых соединен с выходом формирователя 34, а выход. через усилитель 51 (52) и последовательно соединенный с .ним один из выключателей 25 соединен с электромагнитом 19(20) механизма перемещения диаграммной ленты. Кроме того, каждый из электромагнитов 19 и 20 через один из выключателей 25 подключен к выходу соответствующего управляемого генератора 53(54), вход которого соединен с выходом схемы элементов 40 и 41. Устройство работает следующим образом. При подаче питания на токоведущие направляющие 3 включается двигатель 5 каретки. Каретка начинает перемещаться вдоль фронта веретен. При этом датчик 7 положения клретки взаимодействует с деталями машины и,1и специально установленными на машине горками, метками и. т. д., расстояние между которыми соответствует щагу веретен, и выдает сигналы при прохождении мимо каждого веретена. Датчик 6 наличия нити взаимодействует с нитями заправленных веретен и выдает сигналы только при наличии нити. По окончании прохода каретки и достижении ею одного из крайних положений рычажок датчика окончания прохода взаимодействуете упором 9, установленным на мащине,и переключает датчик. Логическая схема разделяет эти сигналы, анализирует их и вырабатывает команды на включение соответствующих механизмов. При наличии обрыва (в случае появления сигнала только от датчика положения каретки) срабатывает электромагнит 10 отметчика, нанося бойком метку на диаграммную ленту. Независимо от того, есть обрыв или нет, происходит перемещение диаграммной ленты при каждом срабатывании датчика 7 положения каретки. В зависимости от направления движения каретки, определяемом по положению датчика окончания прохода, срабатывает электромагнит 19 или 20, каждый из которых через храповой механизм 18 и зубчатую передачу 17 поворачивает на один щаг барабан 16 с закрепленной на нем диаграммной лентой. При переключении датчика 8 окончания прохода включается электродвигатель 15. приводящий во вращение винт 14 с полугайкой 13 и закрепленным на ней отметчиком 10. Отметчик работает следующим образом. При перемещении каретки по токоведущим направляющим 3 вдоль фронта веретен последовательно включаются датчик 6 наличия нити (если иить не оборвана) и датчик 7 положения каретки. Сигналы от датчиков 6 и 7 через кодирующие преобразователи 26 и 27 соответственно по токоведущим направляющим 3 поступают на декодирующее устройство 32 (33), каждое из которых пропускает относящийся к нему сигнал на формирователи 34 и 35 соответственно. Далее -сигнал от датчика 7 положения каретки подается на один из входов элемента И 38. На другой вход этого элемента сигнал поступает с аахода элемента памяти 37 только в том случае, если этот элемент переведен в рабочее состояние сигналом от датчика 7 положения каретки, поступивщим на нее через элемент ,36 временной задержки при прохождении каретки мимо предыдущего веретена. При наличии нити сигнал, поступивший от датчика 6 наличия нити через элементы 27, 3, 33, 35 на нулевой вход элемента памяти 37, сбрасывает этот элемент в нерабочее состояние, {восстановление рабочего состояния элемента памяти осуществляется каждый раз по сигналам датчика 7 положения каретки, поступающим через эле мент 36 временной задержки на единичный вход элемента памяти 37 П1)и вы.чоде каретки из зойы данного веретена. Электромагнит 10 отметчика, подключенный к выходу эле мента И 38 через усилитель 39, срабатынаег таким образом лишь при прохождении каретки мимо незаправленного веретена, в зоне которого не срабатывает датчик 6 наличия нити. При срабатывании электромагнита 10 закрепленный на нем боек ставит отметку на диаграммной ленте. Отметчик перемещается на шаг при совершении кареткой каждого прохода по сигналу датчика 8 окончания прохода. При переключении этого датчика сигнал от него поступает иа один из входов элемента И 28 (29) непосредственно, на другой - через элемент ИЛИ 30 и формирователь 31. При этом через элемент И 28 (29) на кодирующий преобразователь 26 (27) поступает сигнал с длительностью, зависящей от параметров формирующего элемента, но с большей длительности сигналов, поступающих на преобразователь от датчикоь 6 и 8. Этот сигнал, кодовый признак которого совпадает с кодовым признаком .сигнала от одного из датчиков и зависит от положения, в которое пришла каретка, поступает по каналу связи 3 через декодирующее устройство 32 (33) и формирователь 34 (35) на один из входов элемента И 40 (41) непосредственно, а На другой - через элемент временной задержки 42. С выхода элемента И 40 (41) через элемент ИЛИ 43 и выходной усилитель 44 сигнал пбдается на реле 45, включающее : лектродвигатель 15 перемещения отметчика. При повороте вала двигателя на некоторый угол выключатель 22 замыкается горкой, закрепленной на винте, связанном с валом двигателя, и образует блокировочную цепь, сохраняющую реле 45 во включенном состоянии после исчезновения сигнала с выхода усилителя 44 до тех пор, пока винт не совершит один оборот и выключатели 25 не разомкнется. Перемещение диаграммной ленты происходит следующим образом. При движении каретки в одну сторойу по сигналу датчика 7 положения каретки происходит периодическое срабатывание электромагнита 19 и поворот барабана в соответствующую сторону, при движении в другую сторону - срабатывание электромагнита 20 и поворот барабана в другую сторону. Направление поворота барабана определяется датчиком 8 окончания прохода. По сигналу датчика срабатывает элемент И 40 при достижении кареткой одного крайнего положения машины или элемент И 41 при достижении его другого крайнего положения. С выхода элемента 40(41) сигнал поступает на вход элемента памяти 47 (48), выполняюи1его фу-.кцию запоминания направления движения каретки. При переключении датчика окончания прохода (смена направления движения каретки) снгнал появляется на выходе второй схемы элемента И 41 (40), что приводит к срабатыванию соответствующего элемента памяти 48 (47) и к сбрасыванию сработанного ранее элемента 47 (48) сигналом, поступившим на вторай его вход. Сигнал с выхода элемента памяти поступает на вход схемы элел ента И 49(50), подготавливая ее к срабатыванию, которое происходит в моменты подачи сигнала на второй вход элемента И 49 (50) с формирователя S4, включаемого от датчика 7 положения каретки. С выхода элемента И 49(50} сигнал через усилитель 51 (52) и один из выключателей 25, взаимодействующих с горкой, закрепленной на барабане и Служащей для ограничения поворота последнего при достижении положения, соответствующего крайнему положению каретки, на машине, подается на электромагнит 19(20), связанный с храповым механизмом поворота барабана.
Для предотвращения накопления случайных ошибок при регистрации обрыйов в момент включения датчика 8 окончания прохода происходит автоматическая корректировка положения барабана по положению каретки. Это достигается тем, что при включении датчика 8 окон чания прохода по сигналу с элемента И 40 (41) включается управляемый генератор 53 (54), импульсы с которого через выключатель 25 поступают на электромагнит 19 (20) до тех пор, пока барабан не займет положения, соответствующего положению кареткн, после чего цепь электромагнита размыкается выключателем 25.
Предлагаемое устройство позволяет, получить диаграмму распределения обрывов во времени и по веретенам, что в конечном итоге
дает бЪэможность улучшить обс-чуживание и организацию труда на текстильных машинах.
Формула изобретения
. Устройство для контроля обрывов нитей, например на текстильных машинах, содержащее электрически связанные с логическим блоком и установлен1|ые на каретке, перемещающейся по токопроводящим направляющим, датчики положения и окончания прохода каретки и датчик наличия нити, отличающееся тем, что, с целью повышения информативности, оно снабжено отметчиком обрывов, механизмом его перемещения и механизмом перемещения диаграммной ленты, причем отметчик соединен через логический блок с датчиком наличия нити, -механизм перемещения отметчика связан с датчиками положения, а механизм перемещения диаграммной ленты связан с датчиком окончания прохода каретки.
2. Устройство по п. 1, отличающееся тем, что логический блок содержит размещенный на каретке кодирующий элемент, электрически связанный С датчиками положения и окончания прохода каретки и датчиком наличия нити, элемент декодирования, генератор и конечный вы ключатель, при этом управляющий вход генератора подсоединен к датчику окончания прохода каретки, а выходсвязан через конечный выключатель с механизмом перемещения диаграммной ленты.
Источники информации,- принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 127151,. кл. Р 01 Н 13/16, 1959.
2.Патент Великобритании № 1323430, кл. D 1 F, 1973.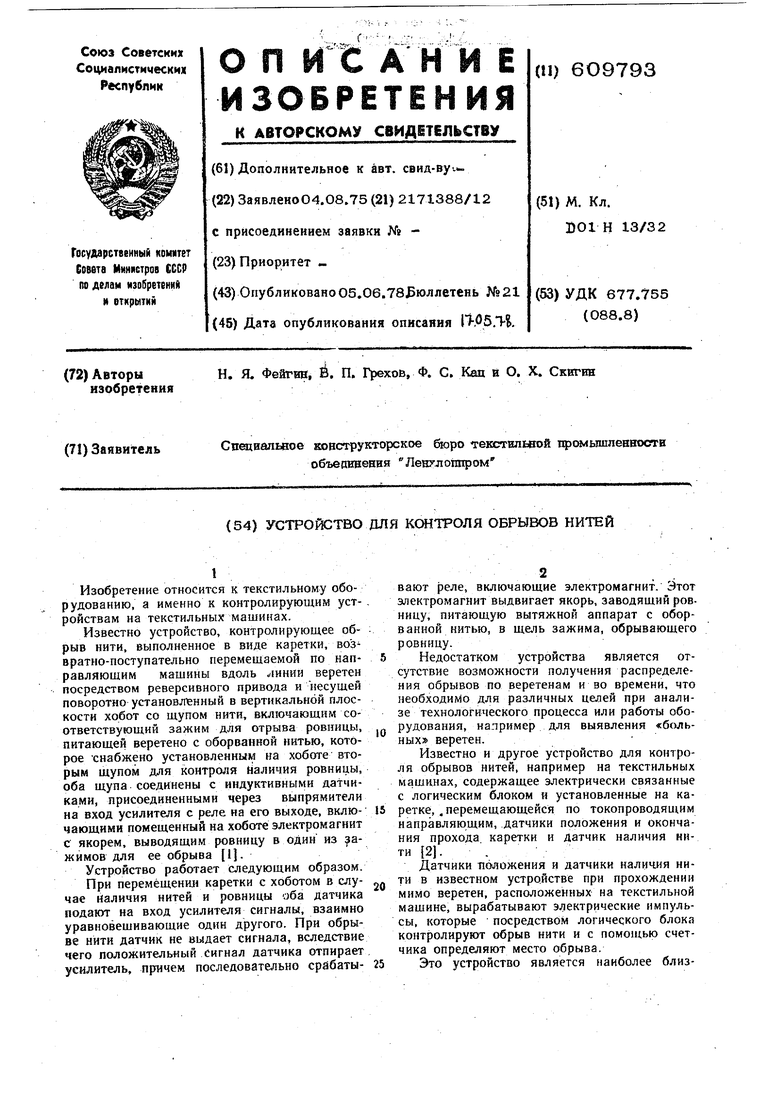
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1680603A1 |
| Устройство для регистрации затягивания цикла работы оборудования | 1980 |
|
SU868798A1 |
| Устройство для снятия початков и надевания патронов на веретена прядильных и крутильных машин | 1961 |
|
SU149696A1 |
| Устройство для прекращения питанияРОВНицЕй ВыТяжНОгО пРибОРА пРядильНОйМАшиНы | 1979 |
|
SU846617A1 |
| Электротермометр | 1958 |
|
SU119699A2 |
| Устройство для регистрации значений контролируемых параметров | 1981 |
|
SU958857A1 |
| Устройство для контроля дефектов ленточных объектов | 1984 |
|
SU1168970A1 |
| ПЛОСКОВЯЗАЛЬНАЯ МАШИНА | 1992 |
|
RU2031996C1 |
| Перемоточная машина для наработки стоговидных паковок | 1976 |
|
SU772965A1 |
| Способ контроля зубчатых колес на зубо- и шлицешлифовальных станках и устройство для его осуществления | 1981 |
|
SU1028999A1 |