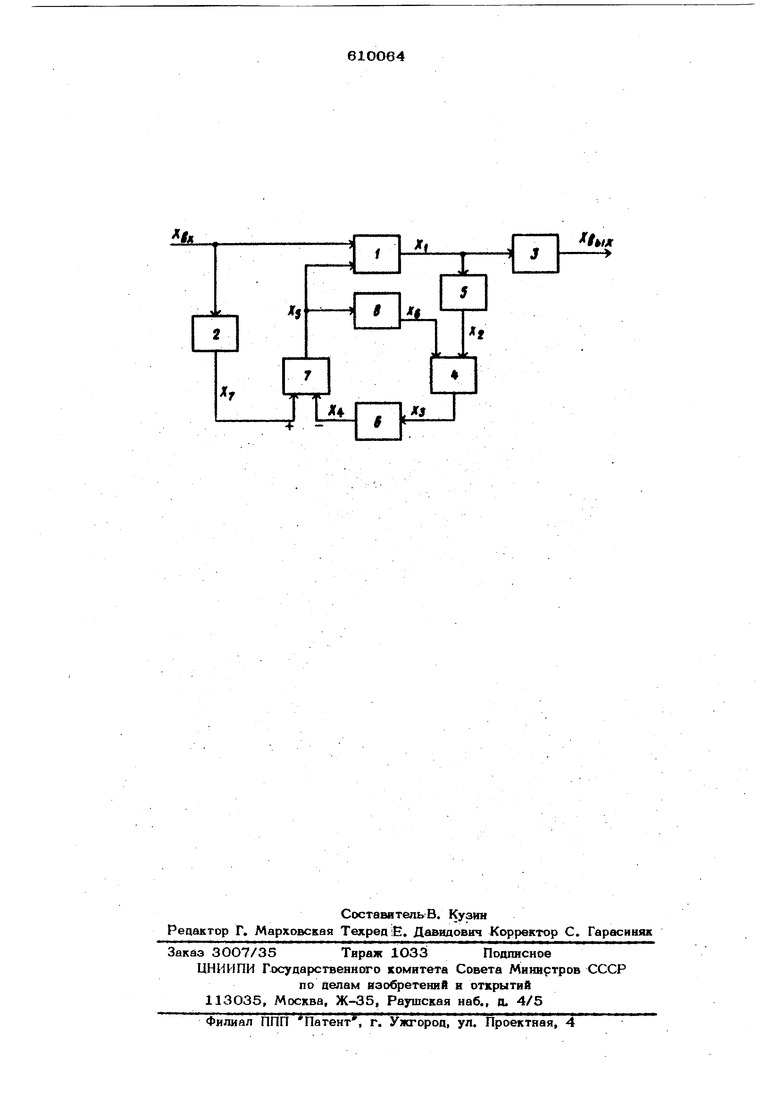
pofl сумматор 7, масштабирующий 9пемвит 8. Регулятор работает спедукяоим образом.. ВкояяоЛ снгяая Хд поступает на первы вход третоэицнонвого репейного, элемента1, на выходе которся-о образуется репейный снгвал X .|. Поступая в пепь отрвяатепьяой обратной связи, этот сигнал преобразуется инерпнонным звеном первого порядка, образованным вторым интегоатооом 6. суммато рами 4н 7, масштабирующими элементамв 5 и 8. Когда сигнал обратной связи превысит сумму входного сигнала Х и его пер вой производной Х- , репейный элемент отключится, при этом сигнал обратной свяаи начнет уменыиаться. Когда сигнал обратной свяэн уменыпится на величину зоны возврата релейного элемента, последний снова включится и про песс повторится. В результате на выходе релейного элемента образуется последовательность импульсов, которые интегрируются первым интегратором 3. В качестве это го звена может использоваться исполнитель ный механизм постоянной скорости или элек тронный интегратор. Передаточные функции отдельных звеньев регулятора имеют следующий вид. Для пер вого интегратора 3i -W.(p) ), . TV,.M Rjl где Тц-д - время полного перемещения ио полнительного механизма; для дифференциат ра а -V/(p). «tg-p i для l MMaTopa 4 X X X j для масщта бирующего элемента К. втЬ- рого инте17ратора 6 с учетом того, что обратная связь является отрицательной - . J ДЛЯ сумматора 7- Х Х + мастабирукяаего ЭПЬАЮ та 8-х -fi-V- Заменяя релейный элемент усилителем, имеющим бесконечный коэффициент усиления получим передаточную функцию всего регулятора. ( где коэффгашент пропорциональности «« постоянная врекюнв интегрирования тИ постоянная времени лифферениирования , причем TI I-tTtf-- постоянные времени соответственно интегратора 3 и дифференциатора 2, Из полученных уравнений следует, что настройки регулятора легко сделать взаимонезависиКолми. Для этого величину К, сле дует менять с помощью изменения коэффициента К т , величину Ту - путем изменения коэффициента К, а величину Тд - путем изменения параметраГ.го свойство .позволяет в щироких пределах менять динамические свойства регулятора и, в частности, получить практически неограниченное значение отношения .. Предложенный регулятор может найти щирокое применение при автоматизации водственных процессов, так как,благода{М1 широкому диапазону настроек,регулятор, можно п{исменить на объектах как с от -носительно простым, так и неблагоприятными динамическими свойствами. Фор м у л а и а об р е т е н и я Релейный пропорцвональшт-янтегральнодиффвренциальный регулятор, содержащий последовательно соединенные релейный элемент и первый интегратор, дифференциат, вход подключен к первому входу релейного элемента и ко входу регулятора, последовательно соединенные первый сумматор и интегратор, первый масштабирующий элемент, вход которого подключен к выходу релейного элемента, а выход - к первому входу первого сумматора, второй масштабирующий элемент, о т л и ч а ющ и и тем, что, с пелыо расширения области применения регулятора, он дополнительно содержит второй сумматор, входы которого соединены соответственно с выходами дифференциатора и второго интегратора, а выход -. со вторым входом релейного элемента и входом второго масштабирующего элемента, выход которого подключен к второму входу первого сумматс а. Источники информации, принятые во внимание при экспертизе: 1, Герасимов С, Г, Теоретические основы автоматического регулирования тепловых процессов. М,, Высшая школа , 1967, с. 137. 2,Kontinuiei eiche Reg-tet mit intertm Schriltfegrtefverhaeter,SiemensZeitschriH:45,(-«970,, g.734-736.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Дифференцирующее устройство | 1985 |
|
SU1267440A1 |
| Дифференцирующее устройство с переменной структурой | 1974 |
|
SU461421A1 |
| Дифференцирующее устройство | 1984 |
|
SU1277143A1 |
| Пропорционально-интегральнодифференциальный регулятор | 1977 |
|
SU696410A1 |
| Устройство автоматического управления процессом обогащения | 1979 |
|
SU971473A1 |
| Импульсное регулирующее устройство | 1983 |
|
SU1151926A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Система автоматического управления периодическим процессом ферментации | 1982 |
|
SU1007092A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |