1
Изобретение относится к теплоэнер гетической и химической технике и мо жет быть использовано при регулирова НИИ различных технологических процес сов в сочетании с исполнительными ме канизмами постоянной скорости.
Целью изобретения является повыше ние быстродействия и уменьшение пере регулирования регулятора.
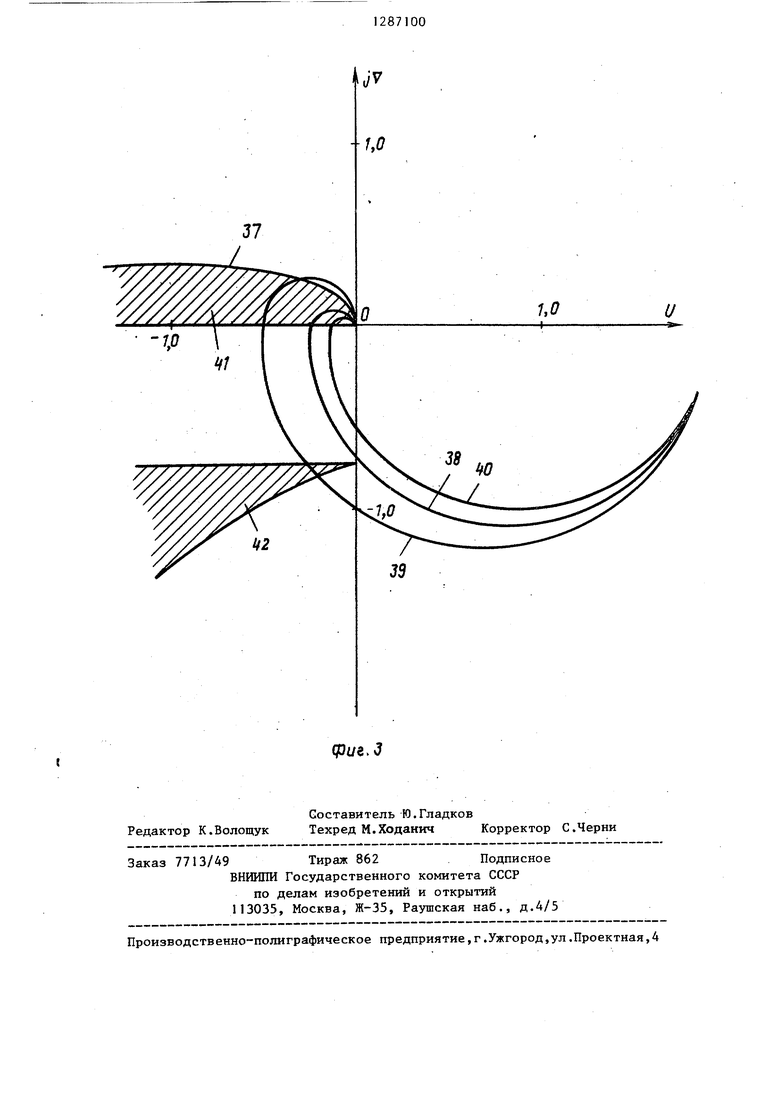
На фиг.1 представлена функциональ ная схема регулятора; на фиг.2 - структурная схема системы регулирования с данным регулятором; на фиг.3- амплитудно-фазовые частотные характеристики систем регулирования с прототипом и предлагаемым регулятором.
Устройство содержит блок 1 сравнения, сумматор 2, задатчик 3, источники 4 и 5 опорных сигналов, входной фильтр 6, корректирующий фильтр 7, первый и ёторой компараторы 8 и 9 ключ 10, четвертый, пятый, третий, первый и второй одновибраторы I - 15, элемент ИЛИ 16, первый и второй усилители 17 и 18 мощности, резисторы 19 - 22, операционные усилители 23 и 24, компараторы 25 и 26, нелинейный элемент 27 типа квантователь уровня, динамические блоки 28 и 29, блок 30 положительной обратной связи объект 31 регулирования, измеритель 32 рассогласования, сумматор 33, апериодические звенья 34 и 35, регулятор 36, годографы 37-40 амплитудно- фазовых частотных характеристик.
На чертежах обозначено: 41 и 42 - области допустимых значений коэффициентов нелинейного блока 27, Ug выходной сигнал датчика регулируемого параметра или регулируемая координата, выходной сигнал задатчи- ка 3, Uj - сигнал рассогласования или выходной сигнал блока 1 сравнения, Ua - выходной сигнал входного фильтра 6, и,, и - выходные сигналы соответственно первого и второго компараторов 8 и 9, и, Ug выходные сигналы соответственно четвертого и пятого одновибраторов 11 и 12, выходные сигналы соответственно первого и второго усилителей 17 и 18 мощностей, - выходной сигнал элемента ИЛИ 16, - выходной сигнал третьего одновибратора 13, и ,Ujg - выходные сигналы соответственно первого и второго одновибраторов 14 и 15, Щ выходной сигнал сумматора 2, Uyt - выходной сигнал корректирующего фильтра 7, Tj, Tj - постоянные вре
2871002
мени апериодических звеньев 34 и 35, Kj и Кд - коэффициенты усиления апериодических звеньев 34 и 35, Т , Т, - длительности прямоугольных импульсов,
5 °Б Ср) передаточная функция объекта регулирования 31, Д- зона нечувствительности компараторов 8 и 9, (- уровень квантования нелинейного элемен
10
}5
квантователь уровня ,х, та 27 типа
выходной сигнал измерителя 32 рассогласования, х, - выходной сигнал сумматора 33, х - выходной сигнал апериодического звена 34, х - выходной сигнал нелинейного элемента 27
х - вытипа квантователь уровня.
ходной сигнал динамического блока 28, х - выходной сигнал блока 30 положительной обратной связи, х - выходной сигнал динамического блока 29, 20 Xj - выходной сигнал апериодического звена 35, Xg - выходной сигнал объекта 31 регулирования или регулируемая координата, Xjg - сигнал задания.
25 .Первый компаратор 8 в сочетании с первым источником 4 опорного сигнала образует первый релейный блок с несимметричной релейной характеристикой, а второй компаратор 9 в сочетании со вторым источником 5 опорного сигнала образует второй релейный блок с несимметричной релейной характеристикой.
Работа регулятора осуществляется
35 следующим образом.
На третий (инверсньй) вход блока
30
L сравнения поступает сигнал U
вх
выхода датчика регулируемого параметра. На первый (неинвертируютий) вход
блока 1 сравнения поступает сигнал с выхода задатчика 3 регулируемого параметра. Результирующий сигнал рассогласования U с выхода блока 7 сравнения поступает на информадионный вход входного фильтра 6. При достижении сигналом tl, на выходе входного фильтра 6 величины, превышающей значение зоны нечувствительности соответствующего компаратора 8
(или 9), происходит срабатьшание последнего. Например, если сигнал Ug в процессе -изменения задания становится больше сигнала Ug , то сигнал Uj больше О, сигнал U. меньше О (в случае, если входной фильтр 6 осуществляет инвертирование сигнала), просходит срабатывание второго компаратора 9. Порог срабатывания первого и йторого компараторов 8 и 9 опре10
15
31287100
деляется величиной сигналов на выходах источников 4 и 5 опорных сигналов. При срабатывании второго комла- ратора 9 на его выходе формируется кусочно-постоянный сигнал U. По его переднему фронту происходит запуск пятого, третьего и второго одновиб- раторов 12, 13 и 15. Длительность импульса на выходе пятого одновибра- тора 12 выбирается исходя из требуемого коэффициента усиления системы и характеристик исполнительного устройства. Длительность импульса на выходе третьего одновибратора 13 выбирается минимально возможной исходя из условия полного разряда компаратора 25 входного фильтра 6 за время импульса, так как .при запуске третьего одновибратора 13 происходит срабатывание ключа 10 и разряд компаратора 25 фильтра 6. Длительность импульса на выходе второго одновибратора 15 выбирается расчетным или опытным путем исходя из динамических характеристик системы и параметров регулятора, например построением при принятой длительности импульса частотной характеристики приведенной линейной части системы автоматического регулирования. При запуске всех одно- вибраторов 11-15 регулятора (фиг.) предполагается, что сигнал на их выходе при входном импульсе имеет положительное значение и равен О при отсутствии импульса на входе.,
Выходной сигнал второго одно- вибратора 15 через сумматор 2 поступает на вход корректирующего фильтра 7. При этом на выходе корректирующествия частота импульсов уменьшается и уменьшается величина корректирующего сигнала на выходе фильтра 7
Таким образом, в установившемся режиме на величину статической ошибки регулирования обратная связь не оказьгоает воздействия, увеличивая бы стродействие регулятора во время переходного процесса.
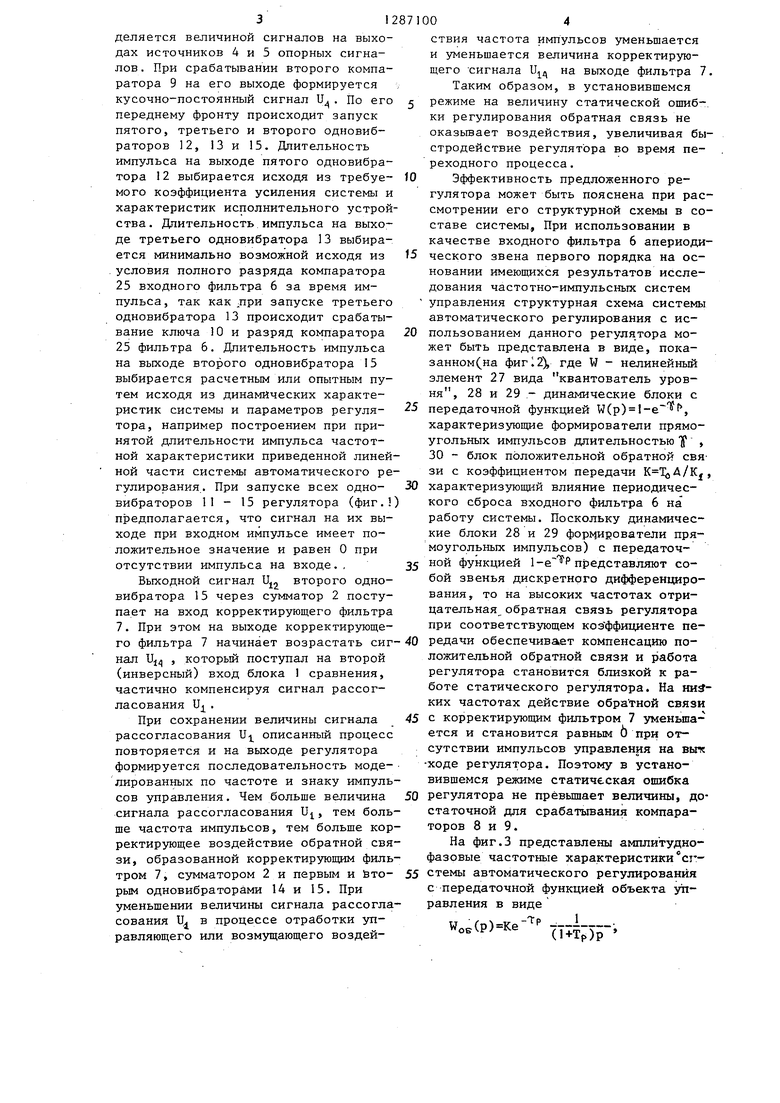
Эффективность предложенного регулятора может быть пояснена при рас смотрении его структурной схемы в со ставе системы. При использовании в качестве входного фильтра 6 апериоди ческого звена первого порядка на основании имеющихся результатов исследования частотно-импульсных систем управления структурная схема системы автоматического регулирования с использованием данного регулятора может быть представлена в виде, пока- занном(на фиг 12), где W - нелинейный элемент 27 вида квантователь уровня, 28 и 29 - динамические блоки с
25 передаточной функцией W(p) , характеризующие формирователи прямоугольных импульсов длительностью Tf , 30 - блок положительной обратной свя зи с коэффициентом передачи
30 характеризующий влияние периодического сброса входного фильтра 6 на работу системы. Поскольку динамические блоки 28 и 29 формирователи прямоугольных импульсов) с передаточ35 ной функцией l-e Pпредставляют собой звенья дискретного дифференцирования, то на высоких частотах отрицательная обратная связь регулятора при соответствующем коэ ффициенте пе20
го фильтра 7 начинает возрастать сиг- 40 редачи обеспечивает компенсацию по- нал Uj , которьш поступал на второй (инверсный) вход блока I сравнения, частично компенсируя сигнал рассогласования Uj .
При сохранении величины сигнала рассогласования И описанный процесс повторяется и на выходе регулятора формируется последовательность моделожительной обратной связи и работа регулятора становится близкой к работе статического регулятора. На низ ких частотах действие обра тной связи 45 с корректирующим фильтром 7 уменьшается и становится равным О при отсутствии импульсов управления на вьп ходе регулятора. Поэтому в установившемся режиме статическая ошибка
ложительной обратной связи и работа регулятора становится близкой к работе статического регулятора. На низ ких частотах действие обра тной связи 45 с корректирующим фильтром 7 уменьшается и становится равным О при отсутствии импульсов управления на вьп ходе регулятора. Поэтому в установившемся режиме статическая ошибка
лированных по частоте и знаку импульсов управления. Чем больше величина 50 регулятора не прёвьш1ает величины, до сигнала рассогласования V, тем боль- статочной для срабатывания компара ше частота импульсов, тем больше корректирующее воздействие обратной связи, образованной корректирующим фильторов 8 и 9.
На фиг.З представлены амплитудно- фазовые частотные характеристики ci -
тром 7, сумматором 2 и первым и йто- 55 стемы автоматического регулирования рым одновибраторами 14 и 15. При с передаточной функцией объекта yit- уменьшении величины сигнала рассогласования Uj в процессе отработки управляющего или возмущающего воздейравления в WoE:(P)Ke
виде
-7р i
(И-Тр)р
5
ствия частота импульсов уменьшается и уменьшается величина корректирующего сигнала на выходе фильтра 7.
Таким образом, в установившемся режиме на величину статической ошиб. ки регулирования обратная связь не оказьгоает воздействия, увеличивая быстродействие регулятора во время переходного процесса.
Эффективность предложенного регулятора может быть пояснена при рассмотрении его структурной схемы в составе системы. При использовании в качестве входного фильтра 6 апериодического звена первого порядка на основании имеющихся результатов исследования частотно-импульсных систем управления структурная схема системы автоматического регулирования с использованием данного регулятора может быть представлена в виде, пока- занном(на фиг 12), где W - нелинейный элемент 27 вида квантователь уровня, 28 и 29 - динамические блоки с
5 передаточной функцией W(p) , характеризующие формирователи прямоугольных импульсов длительностью Tf , 30 - блок положительной обратной свя зи с коэффициентом передачи ,
0 характеризующий влияние периодического сброса входного фильтра 6 на работу системы. Поскольку динамические блоки 28 и 29 формирователи прямоугольных импульсов) с передаточ5 ной функцией l-e Pпредставляют собой звенья дискретного дифференцирования, то на высоких частотах отрицательная обратная связь регулятора при соответствующем коэ ффициенте пе0
редачи обеспечивает компенсацию по-
ложительной обратной связи и работа регулятора становится близкой к работе статического регулятора. На низких частотах действие обра тной связи с корректирующим фильтром 7 уменьшается и становится равным О при отсутствии импульсов управления на вьп ходе регулятора. Поэтому в установившемся режиме статическая ошибка
регулятора не прёвьш1ает величины, до статочной для срабатывания компара
регулятора не прёвьш1ает величины, до статочной для срабатывания компара
торов 8 и 9.
На фиг.З представлены амплитудно- фазовые частотные характеристики ci -
стемы автоматического ре с передаточной функцией
равления в WoE:(P)Ke
виде
-7р i
(И-Тр)р
К 50;
Т 1 S- 1 J
т 20;
т, TTj 0.;
Т,Тг 0,1; К 1,0; 0,1; 6 1,0
К,
1:
Для регулятора-прототипа амплитудно- фазовая частотная характеристика приведенной линейной части системы характеризуется годографом 37 при отрицательном инверсном комплексном коэф- фициенте усиления нелинейного элемента 27 (занимающего область 41 на фиг.З). Как видно из фиг.З, данная система неустойчива. Для предлагаемо - го регулятора комплексный коэффици- ент усиления нелинейного элемента 27 занимает область 42 на фиг.З.
Годограф 39 соответствует амплитудно-фазовой частотной характеристи- ке системы при отключенной отрица- : тельной обратной связи, годограф 38 - амплитудно-фазовой частотной характеристике системы при работе данного регулйтора, годограф 40 - амплитудно- фазовой частотной характеристике системы при использовании в качестве корректирующего фильтра .7 интегратора, а в качестве одновибратора в цепи отрицательной обратной связи - дифференциатора, т.е. при полной компенсации положительной обратной свя- зи. .
Амплитудно-фазовые частотные характеристики систем показывают, что быстродействие предлагаемого регуляг тора близко к предельному при высоких точностных характеристиках. Предельное быстродействие может быть получено при использовании в качестве корректирующего фильтра 7 интегратора, однако в этом случае в системе
5 0
0 5
0 5
регулирования возникает статическая ошибка, зависящая пропорционально от величины задания. Теоретический анализ показывает , что использование описываемого регулятора позволяет существенно повысить динамические характеристики систем регулирования, в том числе уменьшить время регулирования, уменьшить перерегулирование при одновременном исключении автоколебательных режимов и при простоте технической реализации.
Формула изобретения
Частотно-импульсный регулятор содержащий сумматор, первый и второй одновибраторы и последовательно соединенные задатчик, блок сравнения и входной фильтр, соединённый выходом с информационными входами первого и второго компараторов, подключенных опорными входами к выходам соответ- .ственно первого и, второго источников опорных сигналов, а выходами - к соответствующим входам элемента ИЛИ, соединенного выходом через третий од- новибратор с управляющим входом входного фильтра, выход первого компаратора через четвертый одновибратор соединен со входом первого усилителя мощности, выход второго компаратора через пятый одновибратор соединен со входом второго исполнительного механизма, отличающийся тем, что, с целью повьшения быстродейст ВИЯ и уменьшения перерегулирования регулятора, в нем дополнихельно установлен корректирующий фильтр, соединенный выходом со вторым входом блока сравнения, а входом - с выходом сумматора, подключенного- первым и вторым входами к выходам соответственно первого и второго одновибра- торов, соединенных входами с выходами соответственно первого и второго компараторо:в &
32
3/
WcS(p)
8.
Частотно--инпиллс- циц fffiy/fffmSflI
и
фуе J
Составитель-Ю.Гладков Редактор К.Волощук Техред М.Ходанич Корректор С.Черни
Заказ 7713/49 Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4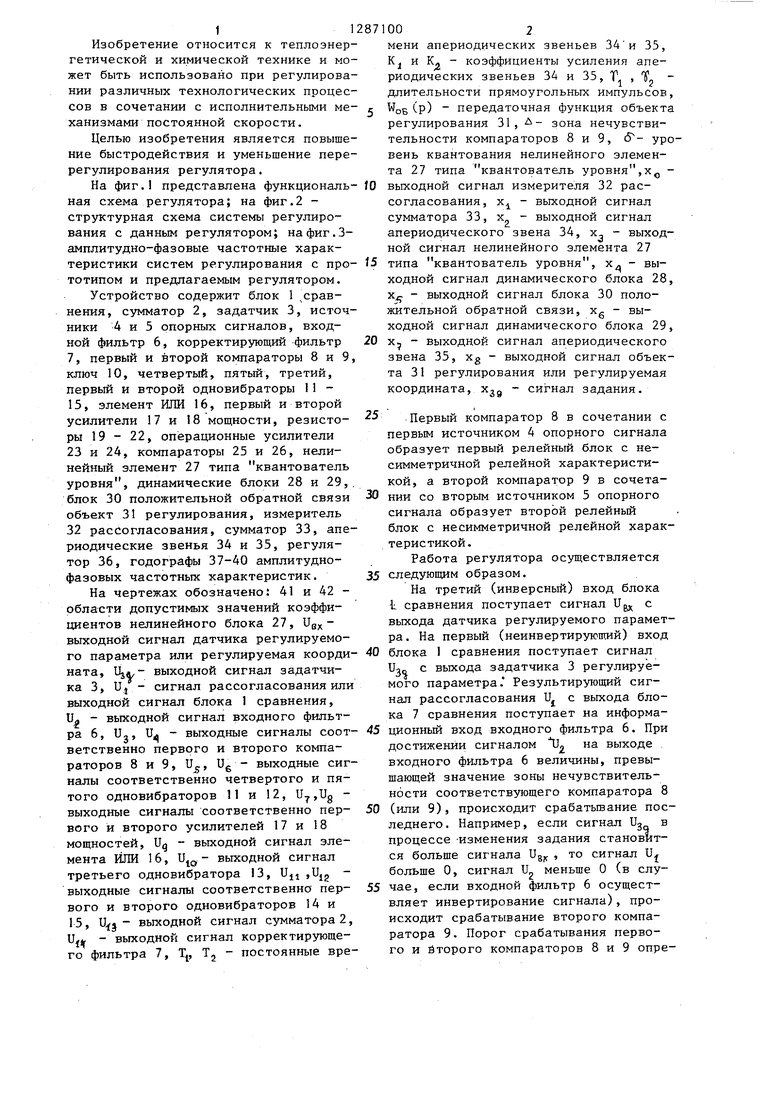
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Устройство для настройки систем автоматического регулирования | 1978 |
|
SU951242A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2008 |
|
RU2383985C1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2373624C1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Развертывающий преобразователь | 1986 |
|
SU1368896A1 |
Изобретение относится к теплоэнергетической и химической технике и может быть использовано при регулировании различных технологических процессов в сочетании с исполнительными механизмами постоянной скорости. Целью изобретения является повышение быстродействия и уменьшение перерегулирования регулятора. Поставленная цель достигается следующим образом. Сигнал задания сравнивается с регулируемым параметром. Полученный сигнал рассогласования преобразуется во входном фильтре, в качестве которого используется апериодическое звено. Его выходной сигнал поступает на информационные входы компараторов, зоны нечувствительности которых задаются соответствующим выбором опорных сигналов. Выходные сигналы компараторов преобразуются в выходные импульсные сигналы и усиливаются по мощности . Выходные сигналы компараторов поступают на входы элемента ИЛИ, выходной сигнал которого преобразуется в импульсный сигнал. Этот сигнал управляет разрядом интегратора входного 4)ильтра/ Выходные сигналы компараторов преобразуются в импульсные сигналы, суммируются.и результирующий сигнал подается на вход корректир.ующего фильтра, например, апериодического звена. Его выходной сигнал уменьшает величину сигнала рассогласования.3 ил. с % (Л to 00 
| Импульсный регулятор | 1982 |
|
SU1105859A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Частотно-импульсный регулятор | 1983 |
|
SU1096608A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
