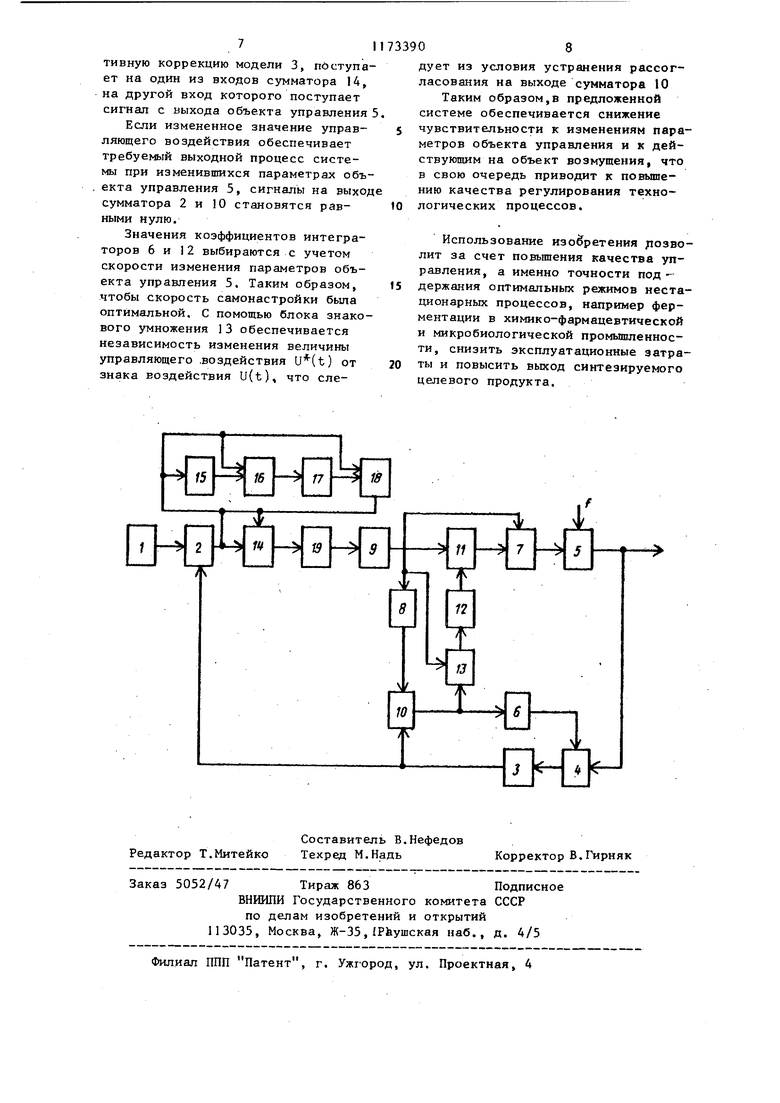
Изобретение относится к самонастраивающимся системам управления и может быть использовано в системах азтоматического управления объектами с переменными параметрами и запаздыванием в химико-фармацевтической, микробиологической, пищевой, химической и других отраслях промьгашенности. Известна система автоматического управления для нестационарных объек тов, содержащая основной контур управления, который включает измеритель сигнала рассогласования, на первый вход которого подается сигна задания, а на второй - инвертированный сигнал с выхода объекта через параллельное корректирукмцее зве но, последовательное корректирующее звено, вход которого соединен с выходом измерителя рассогласования, а выход подключен к первому входу блока умножения и к входу первого сумматора, другой вход которого сое динен с выходом блока умножения, вы ход первого сумматора подключен к входу объекта управления, и дополни тельный контур управления, включающий модель-эталон, на вход которой подается сигнал с выхода последовательдо корректирующего звена, выход модели подключен к .первому входу второго сумматора, на второй вход к торюго поступает инвертированный сигнал с выхода объекта управления через звено согласующее выход объек та управления с выходом модели, и блок настройки, один вход которого соединен с выходом второго сумматор а другой вход - с выходом последова тельного корректирукнцего звена, вых блока подстройки подключен к второму входу блока умножения основного контура системы 1, Недостатком этой системы является то, что в условиях нестабильности параметров динамических свойств объекта управления с изменяющимся во времени запаздыванием качество у равления резко снижается, поскольку операторы блоков дополнительного кон тура управления системы являются ли нейными и стационарными. Известен регулятор для объектов с переменным запаздьшанием, содержа щий последовательно соединенные бло задания, первый сумматор и первый блок согласования, ВЬРСОД которого подключен к первому входу второго сумматора, третий сумматор, первый и второй входы которого соединены соответственно с первым блоком формирования установки и выходом второго блока согласования, дифференциатор и второй блок формирования уставки, подключенные соответственно к первому и второму входам четвертого сумматора, переключатель, первый вход и выход которого соединены соответственно с выходом первого сумматора и со вторым входом второго сумматора, выход которого подключен к интегратору, а также содержащий первый и второй блоки определения модуля, первый и второй релейные элементы и инерционное звено, вход, первый и второй выходы которого соединены соответственно с выходом первого сумматора, входами первого и второго блоков определения модуля, выходы которого подключены к входу второго блока согласования к третьему входу третьего сумматора, выход которого через первый релейньА элемент подключен к входу дифференциатора, а выход четвертого сумматора через второй релейный элемент соединен с вторым входом переключателя 2, Однако использование этого регулятора в системе для управления . инерционными объектами, характеризующимися наряду с переменным чистым запаздыванием нестабильностью других параметров (коэффициента усиления, постоянных времени,приводит к снижению точности управления. Наиболее близкой к предлагаемой является самонастраивающаяся систе 1а автоматического управления для объектов с запаздыванием, содержащая обратную модель объекта, последовательно соединенные задатчик, первый сумматор, дифференциатор, функциональный преобразователь , релейный элемент, ключ, второй сумматор, усилитель, регулятор, блок умножения, третий сумматор, подключенный выходом к входу объекта управления, и последовательно соединенные блок знакового умножения и первый интегратор, подключенный выходом к второму входу блока умножения, соединенного входом с вторым входом третьего сумматора выход первого сумматора подключен к второму входу второго сумматора, к второму входу функционального пре образователя и к второму входу ключа СЗ. Недостаток известной системы для управления нестационарным объектом с изменяющимся запаздыванием заключается в невозможности точной реализации обратной модели объекта управления, причем включение в контур системы, реализующий обратную модель, звена с постоянным запаздыванием вследствие повьшенной чувствительности системы к отклонению запаздывания от расчетного приводит к снижению точности управления Цель изобретения - повьпиение точности системы. Цель достигается тем, что самонастраивающаяся система автоматического управления для объектов с запаздыванием содержит последовательно соединенные блок коррекции, четвертый сумматор, второй интегратор и пятый сумматор, подключенный вторым входом к выходу объекта управления, а выход - к входу обратной модели объекта, выход которой подключен к вторым входам перво го и четвертого сумматора, выход которого подключен к первому входу блока знакового умножения, соединен ного вторым входом с выходом регулятора и входом блока согласования На. чертеже изображена блок-схема системы. На схеме обозначены задатчик 1 , первый сумматор 2, обратная модель 3 объекта, второй сумматор 4, объек управления 5, второй интегратор 6, третий сумматор 7, блок 8 коррекции регулятор 9, пятый сумматор 10, блок умножения 11, первый интегратор. 12, блок 13 знакового- умножения, четвертый сумматор 14, дифференциатор 15, функциональньй преобразователь 16, релейный элемент 17, .ключ 18, усилитель 19 и f возмущающее воздействие. Передаточная функция обратной модели 3 объекта формируется следую щим образом. Пусть объект управления имеет пе редаточную функцию и ( Р) / , Wlpj Q- /у е () (1) 04 Обратная модель инерционной част« объекта управления без запаздывания имеет передаточную функцию Vp)l74 1 i(p) которая практ 1чески нереализуема. Заменим ее функцией вида nj;) в,(р) где r n-m+l Выбором г обеспечивается реализуемость передаточной функции f3 J, Компенсация действия на работу системы параметрических возмущений объекта управления и внешних возмущений обеспечивается следующим образом. Введем обратную модель без запаздывания, имеющую передаточную функцию (3), в цепь обратной связи системы управления. Тогда передаточная функция участка вход объекта управления - вход первого сумматора пример вид (операторы ) Р S(p) предполагаются квазистационар. р) ,)ГР W,.«(p)W;,(pl - --- g n.(P)3a(p)3,(P) Ввод в систему блока 8 с оператором S..(p), имеющим порядок выше или равным избытку полюсов объекта управления над его нулями, позволяет избежать получения производных высоких порядков при реализации обратной модели объекта и обеспечивает получение сигнала рассогласования между объектом управления и его.моделью. Из (4 ) видно, что динамика эквивалентного объекта определяется запаздыванием объекта и характеристикой стационарного оператора |/8,,(р). Равенство (4) получено из условия квазистационарности операторов R(p), QpCp). С учетом того, что системы управления нестационарными объектами с запаздыванием характеризуются низким критическим коэффициентом усиления, то необходимо в первую очередь компенсировать значительные изменения коэффициента усиления объекта, соответствующим образом изменяя величину управляющего воздействия. Дополнительно учитывая, что объект управления имеет неконтролируемое возмущение, аддитивно влияющее на выходную величину, а также изменяющиеся параметры инерционной части, приводящие к отклонению выходной величины модели, то их влияние учитывается (моделируется ) ин тегратором в цепи обратной связи обратной модели объекта. Таким образом, как следует из вышеописанного, влияние изменяющих ся параметров объекта может быть скорректировано.без непосредственного измерения текущих значений па раметров объекта управления. Обозначив передаточную функцию регулятора (р), нелинейного корректирующего устройства f(f), при вьшолнении в системе условия (4) характеристическое уравнение замкнутой системы будет иметь вид и-(р) Wp(pb-P|4-r 0 (5) .Из выражения (5 ) видно, что на устойчивость системы существенное влияние оказывает только запаздывание объекта управления, поскольку характеристики остальнызГ звеньев системы(Wp(р) и Sr(p)) извес ны. Для устойчивого и качественного поддержания требуемого режима на выходе системы в этом сггучае целесообразно прим--.нить нелинейную коррекцию. Эта коррекция выполняется в системе при помощи нел нейного Корректирующего устройства с переменной структурой, цепь из блоков 5, 16, 17, 18, которое во время переходного процесса в зависимости от знаков и соотношения сигнала рассогласования и его перв производной вырабатывается регулирующее воздействие, параметры кото рого зависят от временя запаздывания объекта. Система работает следующим образом. При отклонении выходной величи ны объекта управления 5 от оптимального значения, задаваемого блоком задания 1, вызванного непре денными изменениями параметров объ екта либо возмущением f, на выходе сумматора 2 возникает сигнал рассогласования, который поступает на вход сумматора 4, на вход дифферен циатора 15, на один из входов функ ционального преобразователя 16 и ключа 18. Сигнал рассогласовачия и его производная, полученная на выходе дифференциатора 15, поступает на вход функционального преобразователя 16. Функциональный преобразователь 16 на Их основе образует сигнал ( - постоянный коэффициент ), поступающий на вход релейного элемента 17, который вьщеляет факт попадания изображающей точки в определенные секторы фазовой плоскости. Выходной сигнал релейного злемента 17 поступает на вход ключа 18, выходной сигнал которого У(б,6) поступает на вход сумматора 4, где складывается с сигналом fj.., поступающим с выхода сумматора 2, причем %,ег{ в при r(i) уО , О при K(-t) 0. Выходной сигнал сумматора ju. V( i (f4.fQ - постоянный коэффициент j поступает на усилитель 19, коэффициент усиления которого К. Сигнал с выхода усилителя 19 поступает на вход регулятора 9, формирующего на выходе управляющее воздействие U(t), которое поступает на вход сумматора 7, и на один из входов блока умножения 11. Если переходный процесс на выходе объекта управления 5 вызван возмуше нием и при этом параметры объекта остаются постоянными, а значит параметры модели 3 соответствуют параметрам объекта управления 5, то сигнал рассогласования на выходе сумматора 10 равен нулю. Выходные сигналы блока 13, первого 6 и второго 12 интеграторов, являющихся исполнительными элементами контура самонастройки, также равны нулю. При этом выходной сигнал блока умножения I1, выходной сигнал сумматора 7 также равны нулю. При изменении параметров объекта управления 5 на выходе сумматора 10 возникает рассогласование, которое поступает на вход интегратора 12 и через блок знакового умножения 13 на вход интегратора 6. Выходной сигнал интегратора 6 в этом случае поступает на вход блока умножения 11, с помощью/ которого изменяется величина управляющего воздействия U(t), поступающего с выхода регулятора 9. Одновременно сигнал с выхода интегратора 12, обеспечивающего адди7
тивную коррекцию модели 3, поступает на один из входов сумматора 14, на другой вход которого поступает сигнал с выхода объекта управления
Если измененное значение управляющего воздействия обеспечивает требуемый выходной процесс системы при изменившихся параметрах объекта управления 5, сигналы на выход сумматора 2 и 10 становятся равными нулю.
Значения коэффициентов интеграторов 6 и 12 выбираются с учетом скорости изменения параметров объекта управления 5. Таким образом, чтобы скорость самонастройки была оптимальной. С помощью блока знакового умножения 13 обеспечивается независимость изменения величины управляющего .воздействия U(t) от знака воздействия U(t), что сле33908
дует из условия устранения рассогласования на выходе сумматора 10
Таким образом,в предложенной системе обеспечивается снижение 5 чувствительности к изменениям параметров объекта управления и к действующим на объект возмущения, что в свою очередь приводит к повышению качества регулирования технологических процессов.
Использование изобретения дозволит за счет повьшения качества управления, а именно точности под держания оптимальных режимов нестационарных процессов, например ферментации в химико-фармацевтической и микробиологической промышленности, снизить эксплуатационные затраты и повысить выход синтезируемого целевого продукта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления периодическим процессом ферментации | 1982 |
|
SU1007092A1 |
| Система управления | 1977 |
|
SU732808A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
САМОНАСТРАИВАЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ, содержащая обратную модель объекта без запаздывания, последовательно соединенные задатчик, первый сумматор, дифференциатор, функциональный преобразователь, релейный элемент. ключ, второй сумматор, усилитель, регулятор, блок умножения, третий сумматор и объект управления, выход регулятора соединен со вторым входом -третьего сумматора, выход первого сумматора соединен со вторыми входами второго сумматора, функционального преобразователя и ключа, а второй вход блока умножения соединен с выходом первого интегратора, вход которого соединен с выходом блока знакового умножения, отличающаяся тем, что, с целью повьшения точI ности системы, она содержит последовательно соединенные блок коррек(Л ции, четвертый сумматор, второй с интегратор и пятьй сумматор, второй вход которого соединен с выходом .объекта управления, а выход через Обратную модель объекта без запаздывания соединен со вторыми входами первого и четвертого сумматоров, первый вход блока знакового умносо ,жения соединен с выходом четвертого 00 со сумматора, а второй вход -- с выхо-дом регулятора и входом блока кор рекции.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Самонастраивающаяся система | |||
| Справочник | |||
| Под ред | |||
| П.И.Чинаева, Киев, Наукова думка, Л969, с | |||
| Приспособление для автоматического тартания | 1922 |
|
SU416A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| (прототип). | |||
