(54) УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ РАБОЧЕГО ОРГАНА ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для соединения рабочегоОРгАНА C РуКОТью эКСКАВАТОРА | 1979 |
|
SU853018A1 |
| Подвеска рабочего органа одноковшового экскаватора | 1985 |
|
SU1377337A1 |
| Устройство для крепления съемного ковша гидравлического экскаватора | 1982 |
|
SU1021722A1 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| УНИФИЦИРОВАННЫЙ ЭКСКАВАТОР | 2008 |
|
RU2379426C2 |
| Рабочее оборудование гидравлического экскаватора | 1990 |
|
SU1763587A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2004 |
|
RU2276233C1 |
| Захватно-корчевальный сменный рабочий орган экскаватора | 1990 |
|
SU1740564A1 |
| ЭКСКАВАТОРНОЕ ОБОРУДОВАНИЕ | 1990 |
|
RU2026930C1 |
| ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2008 |
|
RU2365712C1 |
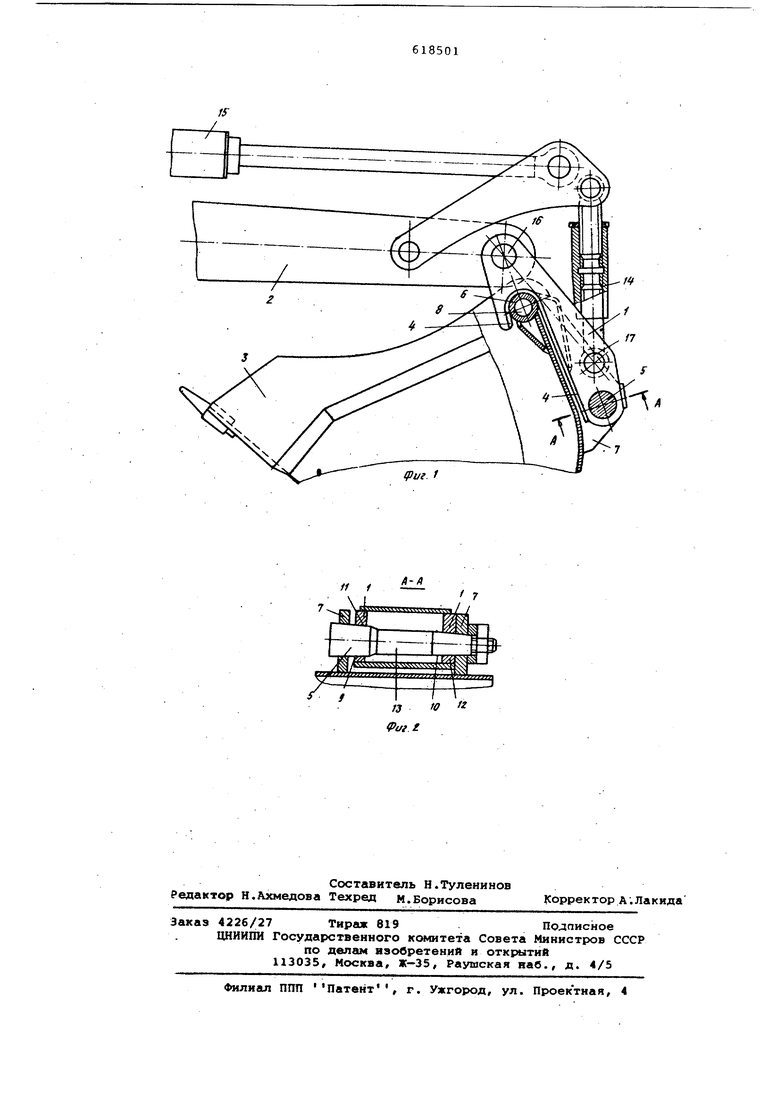
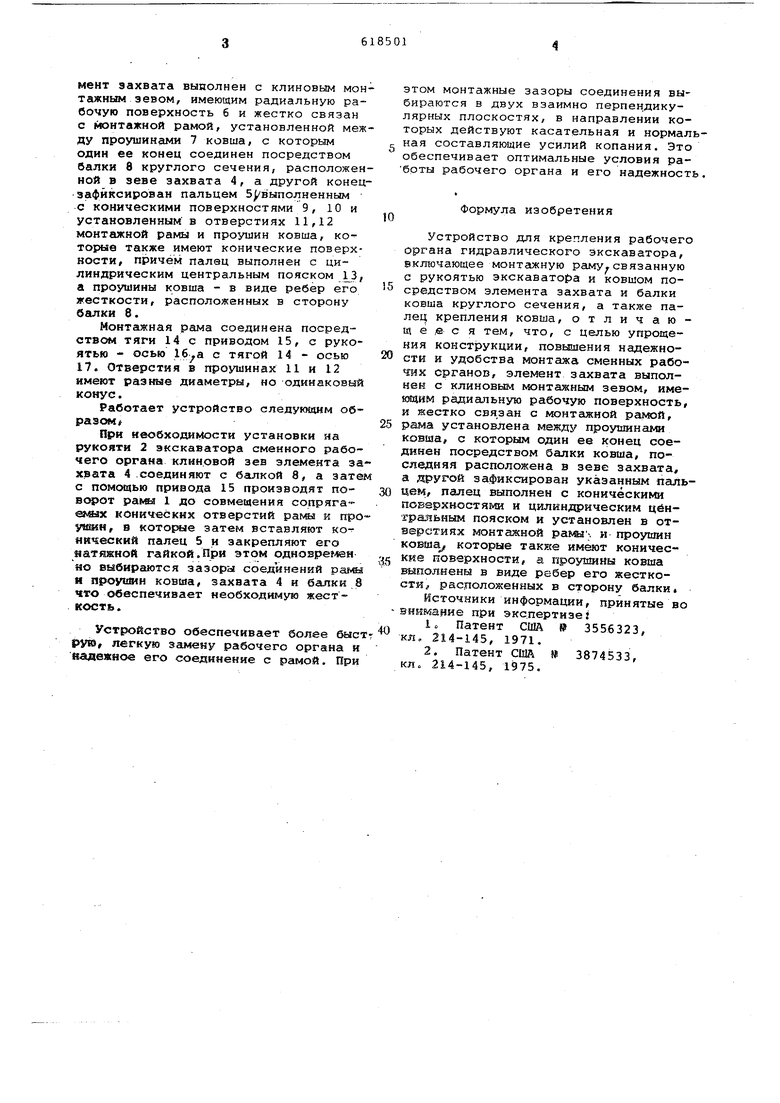
Изобретение относится к устройствгш для соединения рабочих органов с частями машин, в частности ковша экскаватора с его рукоятью. Известно устройство для крещения ковша к рукояти экскаватора, соде Жсшее подвеску и средства крепления Недостатке этого устройства является сравнительно неудовлетворит ельн а я нащежность соеди нени я. Наиболее близким к изобретению яв ляется устройство для крепления рабочего органа гидравлического экскаватора, включающее монтгикную раму, связанную с рукоятью экскаватора и ковшом посредством элемента захвата и балки ковша круглого сечения, а также палец крепления ковша 2. Недостатком этого устройства является сложность соединения pavbt с рабочим органом при совменяении посадочных плоскостей захвата и передней бгитки, а также отверстий и элементов крепления рабочего органа. Кроме го, конструкция устройства усложнена наличием клиньев, ус анавливаелшх для обеспечения жесткости соединения а расположение проушин задней части верхней стенки ковша без связи ее с балкой приводит к увеличению веса рабочего органа. Целью изобретения является упрощение конструкции устройства, повышение нгшежности и удобства монтажа сменных рабочих органов. Цель достигается тем, что в устройстве элемент захвата выполнен с клиновым монтажным зевом, имеющим радиальную рабочую поверхность, и жестко связан с монтажной рамой, рама установлена между проушинами ковша, с которым один ее конец соединен посредством балки ковша, последняя расположена в зеве захвата,.а другой - зафиксирова / указанным пальцем, палец выполнен с коническими поверхностями и цилиндрическим центральным пояском и установлен в отверстиях монтажной рамы и проушин ковша, которые таклсе имеют конические поверхности, а проушины ковша выполнены в виде ребер его жесткости, расположенных в сторону ,балки. На фиг. 1 представлено устройство; на фиг. / сечение А-А фиг. 1. Устройство содержит монтажную раму 1,связанную с рукоятью 2 экскаватора и ковшсм 3 посредством элемента захвата 4, и палец 5 крепления ковша/Элемент захвата выполнен с КЛИНОВЕЛМ монтажным зевом, имеющим радиальную рабочую поверхность 6 и жестко связан с монтажной рамой, установленной между проушинами 7 ковша, с которым один ее конец соединен посредством балки 8 круглого сечения, расположенной в зеве захвата 4, а другой конецзафиксирован пальцем З выполненным с коническими поверхностями 9, 10 и установленным в отверстиях 11,12 монтажной рамы и проушин ковша, которые также имеют конические поверхности, причём палец выполнен с цилиндрическим центральным пояском , а проушины ковша - в виде ребер его жесткости, расположенных в сторону балки 8.
Монтажная рама соединена посредством тяги 14 с приводом 15, с рукоятью - осью 16.а с тягой 14 - осью 17. Отверстия в проушинах 11 и 12 имеют раэшле диаметры, но одинаковый конус.
Работает устройство следующим обpa.3OKt
При необходимости установки на рукояти 2 экскаватора сменного рабочего органа клиновой зев элемента захвата 4 соединяют с балкой 8, а затем с помощью привода 15 производят поворот padrffit 1 до совмещения сопряга€ aiix конических отверстий paNus и проуашя, в котоЕ«е затем вставляют кот нкческий палец 5 и закрепляют его йатяжной гайкой.При этом одноЕре лен «о выбираются зазоры соединений рамы и проуишн ковша, захвата 4 и балки 8 что обеспечивает необходимую жесткость.
Устройство обеспечивает более быст рук, легкую замену рабочего органа и йадеясное его соединение с рамой. При
этом монтажные зазоры соединения выбираются в двух взаимно перпен.дикулярных плоскостях, в направлении которых действуют касательная и нормальц ная составляющие усилий копания. Это обеспечивает оптимальные условия рабрты рабочего органа и его надежность,
Формула изобретения
Устройство для крепления рабочего органа гидравлического экскаватора, включающее монтг«(ную раму связанную с рукоятью экскаватора и ковшом посредством элемента захвата и балки ковша круглого сечения, а также палец крепления ковша, отличающее с я тем, что, с целью упрощения конструкции, повышения надежности и удобства монтажа сменных рабо шх органов, элемент захвата выполнен с клиновым монтажным зевом, имеквдим радиальную рабочую поверхность, и жестко связан с монтс1жной рамой,
рама установлена между проушинами ковша, с которым один ее конец соединен посредством балки ковша, последняя расположена в зеве захвата, а другой зафиксирован указанным палькем, палец выполнен с коническими поверхностями и цилиндрическим центральным пояском и установлен в отверстиях монтажной рамы-. и проушин ковша которые также имеют коническке поверхности, а проушины ковша выполнены в виде ребер его жесткости, расположенных в сторону балки.
Источники информации, принятые во знкмание при экспертизе:
кл. 214-145, 1971.
// i
