1
Изобретение относится к устройствам для соединения рабочих органов с частями машин, в частности ковша экскаватора с его рукоятью.
Известно устройство для крепления ра- 5 бочего органа гидравлического экскаватора, в котором имеется захват с клиновым монтажным зевом и фиксируюш,ий элемент в виде пальца .
Недостатком этих устройств является ю невозможность обеспечения в процессе эксплуатации беззазорного присоединения рабочего органа, в результате чего возникающие в каждом цикле динамические нагрузки приводят к быстрому разрушению is деталей устройства.
Известно навесное оборудование для разработки грунта, содерл аш,ее прикрепленную к базовой машине рукоять и рабочий орган, причем на рукояти смонтирован 20 силовой цилиндр, шток которого шарнирно соединен с рычагом, а на конце рукояти установлена эксцентриковая ось, причем к рабочему органу прикреплены скобы, соответственно взаимодействующие 25 с рычагом и эксцентриковой осью 2.
Недостатком этого устройства является необходимость периодической ликвидации
зазора в соединении рабочего органа с рукоятью.
Известно устройство для соединения рабочего органа с рукоятью экскаватора, содержащее шип рукояти, проушину на рабочем органе и фиксатор .
Однако такое устройство недостаточно надежно вследствие того, что оно не исключает зазоры в соединениях.
Цель изобретения - повышение надежности соединения.
Это достигается тем, что в устройстве для соединения рабочего органа с рукоятью экскаватора рукоять снабжена шарнирно связанной с ней траверсой, на которой расположен шип, выполненный в виде клина, причем проушина и шип имеют в поперечном сечении скошенные в сторону оси их симметрии рабочие поверхности, а фиксатор выполнен в виде приводного эксцентричного кулачка.
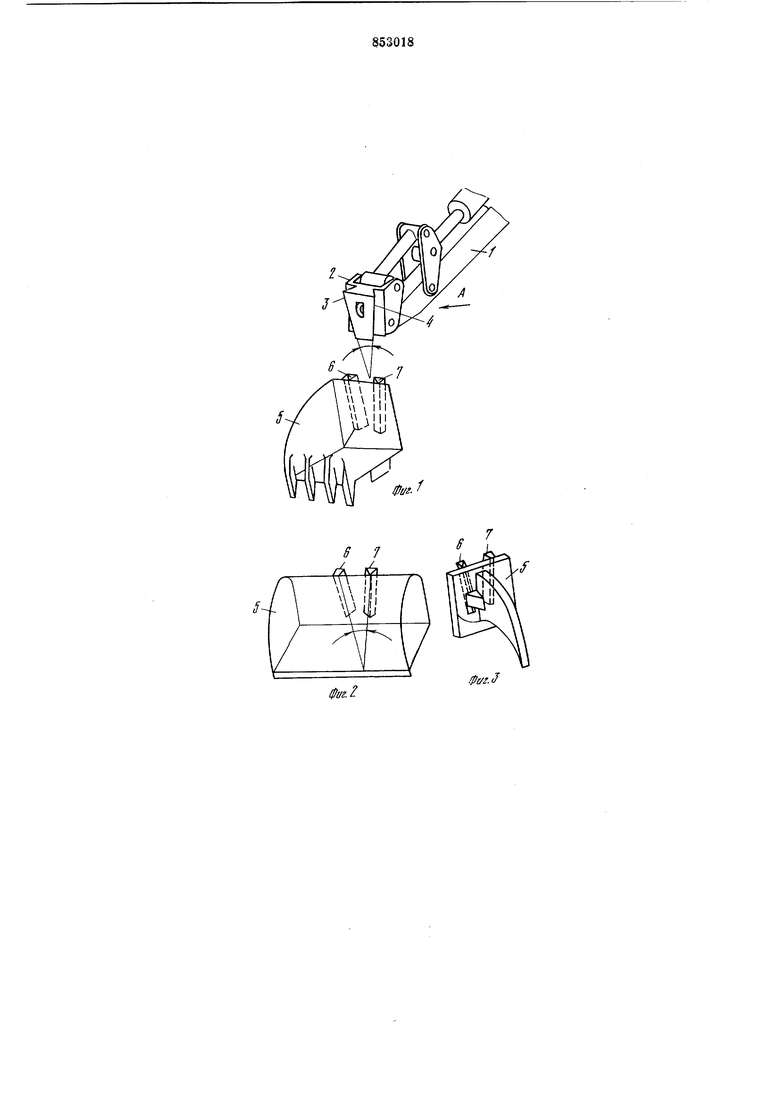
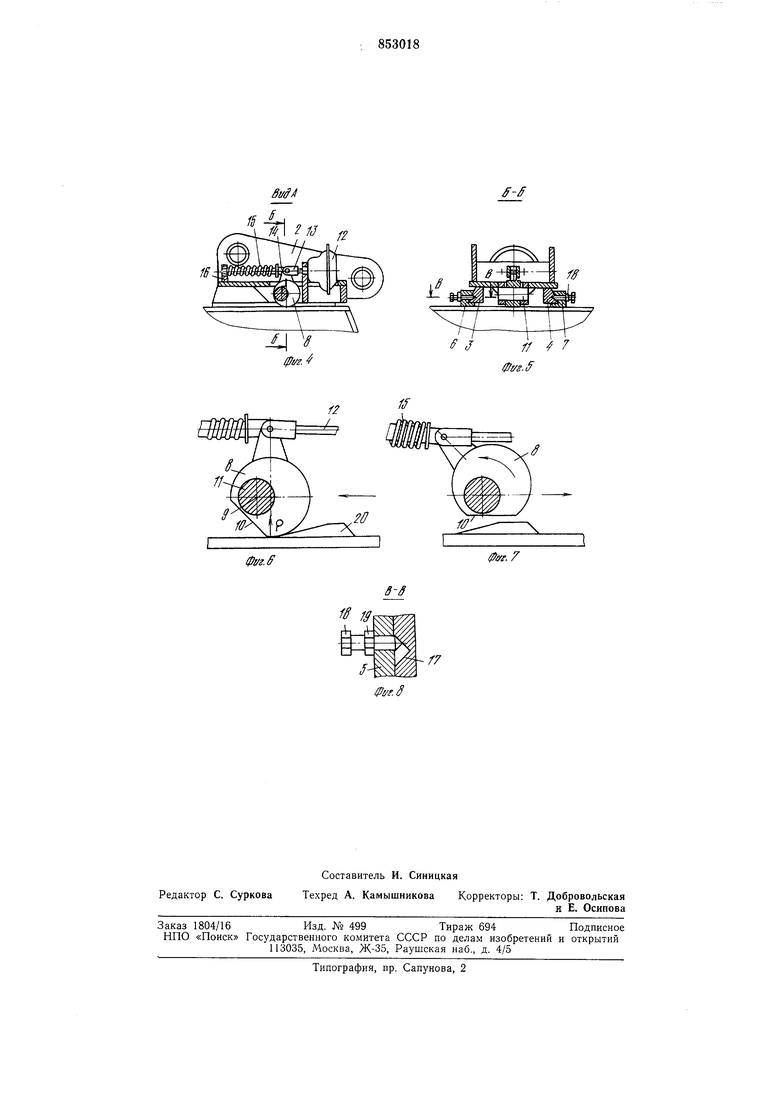
На фиг. 1 изображено устройство для соединения рабочего органа с рукоятью; на фиг. 2 и 3 сменное оборудование; на фиг. 4 - вид А. фиг. 1; на фиг. 5 - разрез Б-Б фиг. 4; на фиг. 6 - эксцентрик в нижнем положении; на фиг. 7 - эксцентрик в верхнем положении; на фиг. 8 - разрез В-В фиг. 5. Устройство для соединения рабочего органа с рукоятью 1 содержит траверсу 2, на которой выполнены направляющие 3 и 4, образующие шип с наклонными в сторону оси его симметрии рабочими поверхностями. Шип выполнен в виде клина. На рабочем органе 5 расположены направляющие 6 и 7, образующие проущину, имеющую ответные шипу наклонные поверхности. На траверсе установлен фиксатор 8 в виде приводного эксцентричного кулачка с эксцентриковой осью 9, лыской 10 и пальцем И. Кулачок соединен с пневмокамерой 12 тягой 13 и тягой 14 через пружину 15 с кронштейном 16, установленным на траверсе 2. На направляющих 3 и 4 выполнены углубления 17, на направляющих 6 и 7 - резьбовые, отверстия, в которых установлены болты. 18 с контргайкой 19. На рабочем органе 5 установлен наклонный упор 20. Устройство работает следующим образом. При необходимости смены рабочих органов движением рукояти 1 вводят шип рукояти в проущипу рабочего органа. При этом направляющие 3 и 4 траверсы 2 узким концом вводятся в клиповый паз, образованный направляющими 6 и 7 рабочего органа. Фиксатор 8, двигаясь вместе с траверсой 2 по стрелке (фиг. 6), перескакивает через упор 20 и под действием пружины 15 заклинивается, обеспечивая беззазорное соедипение направляющих 3 и 4 траверсы в направляющих 6 и 7 (фиг. 5). В процессе работы составляющая усилия резания грунта способствует натягиванию рабочего органа на устройство (в данном случае ковща обратной лопатки на устройство), а эксцентрик усилием Р (фиг. 6) исключает возможность сдвигания рабочего органа относительно устройства, гарантируя тем самым безопасность работы. Для отсоединения рабочего органа от рукояти необходимо положить его на грунт в положение, аналогичное показанному на фиг. 1, затем подать воздух в пневматическую камеру 12 (фиг. 4), которая тягой 13 повернет фиксатор 8 по стрелке (фиг. 7). Пружина 15 при этом сожмется, а лыска 10 обеспечит линейный проход фиксатора 8 над упором 20 в направлении стрелки. Далее подъемом рукояти 1 выводят направляющие траверсы из направляющих рабочего органа и отсоединяют его от рукояти. При необходимости длительной работы одним рабочим органом фиксация может осуществляться затяжкой болтов 18 и контргайкой 19, при этом фиксатор 8 не нагружается, так как затягивание достигается усилием, возникающим от действия болтов 18 на конусную поверхность углублений 17 в направляющих 3 и 4 траверсы 2 (фиг. 5). Формула изобретения 1. Устройство для соединения рабочего органа с рукоятью экскаватора, содержащее щип рукояти, проущину на рабочем органе и фиксатор, отличающееся тем, что, с целью повыщеиия надежности соединения, рукоять снабжена щарнирно связанной с ней траверсой, на которой расположен щин, выполненный в виде клина, причем проушина и щип имеют в поперечном сечении скошенные в сторону оси их симметрии рабочие поверхности, а фиксатор выполнен в виде приводного эксцентричного кулачка. 2.Устройство для соединения рабочего органа с рукоятью экскаватора по п. 1, отличающееся тем, что на образующей поверхности кулачка выполнена лыска, а рабочий орган снабжен упором со скошенной в сторону кулачка поверхностью. 3.Устройство для соединения рабочего органа с рукоятью экскаватора по п. 1, тличающееся тем, что шип имеет болты, а проушина выполнена с углубленими под болты. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 618501, кл. Е 02F 3/81, 1977. 2.Авторское свидетельство СССР . 240548, кл. Е 02F 5/30, 1968. 3.Авторское свидетельство СССР по аявке № 2536998/29-03, кл. Е 02F 3/36, 977 (прототип).
фуг.&
,7
| название | год | авторы | номер документа |
|---|---|---|---|
| Сменное рабочее оборудование к одноковшовому экскаватору | 1982 |
|
SU1183626A1 |
| Устройство для соединения рабочего органа с рукоятью экскаватора (его варианты) | 1981 |
|
SU996650A1 |
| Подшипник рабочего оборудования экскаватора | 1980 |
|
SU891843A1 |
| Сменное рабочее оборудование к одноковшовому экскаватору | 1982 |
|
SU1183625A1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1980 |
|
SU1000521A1 |
| Рабочее оборудование гидравли-чЕСКОй эКСКАВАциОННОй МАшиНы | 1978 |
|
SU831902A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА | 1999 |
|
RU2164985C2 |
| ЭЛЕВАТОР ТРУБНЫЙ УНИВЕРСАЛЬНЫЙ ОДНОШТРОПНЫЙ | 2022 |
|
RU2794051C1 |
| Рабочее оборудование для разработки мерзлых грунтов к одноковшовому экскаватору | 1981 |
|
SU968227A2 |
| Стволовая буропогрузочная машина | 1982 |
|
SU1078078A1 |