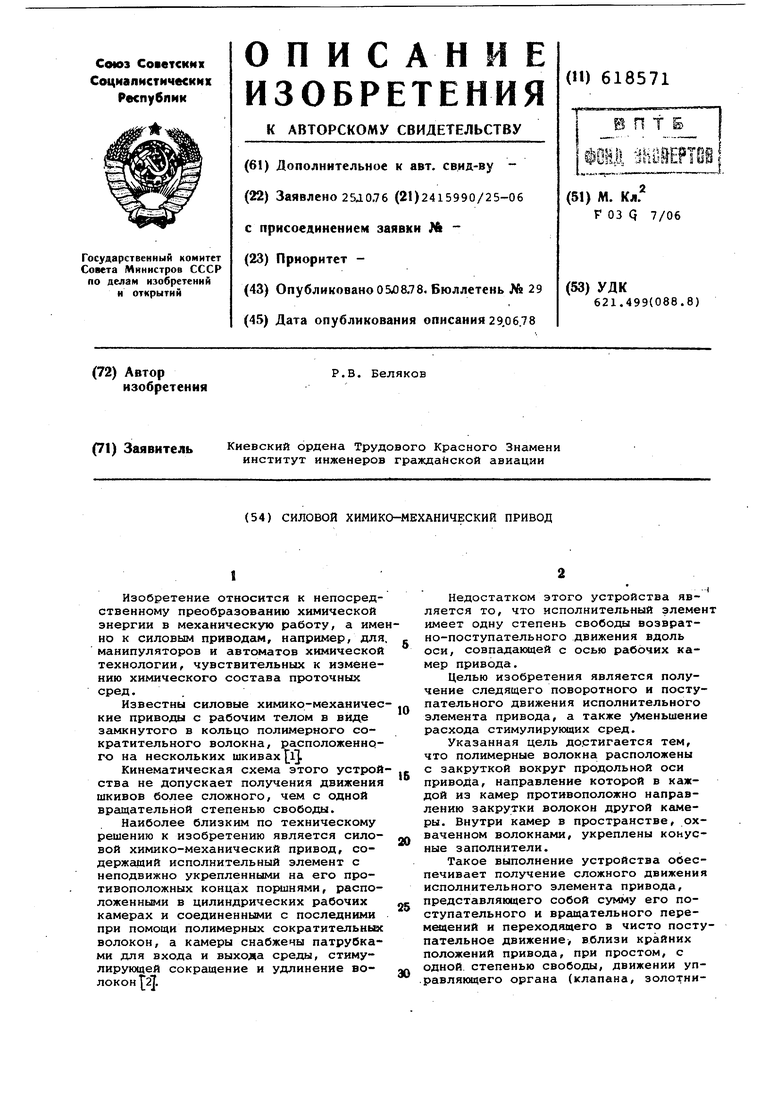
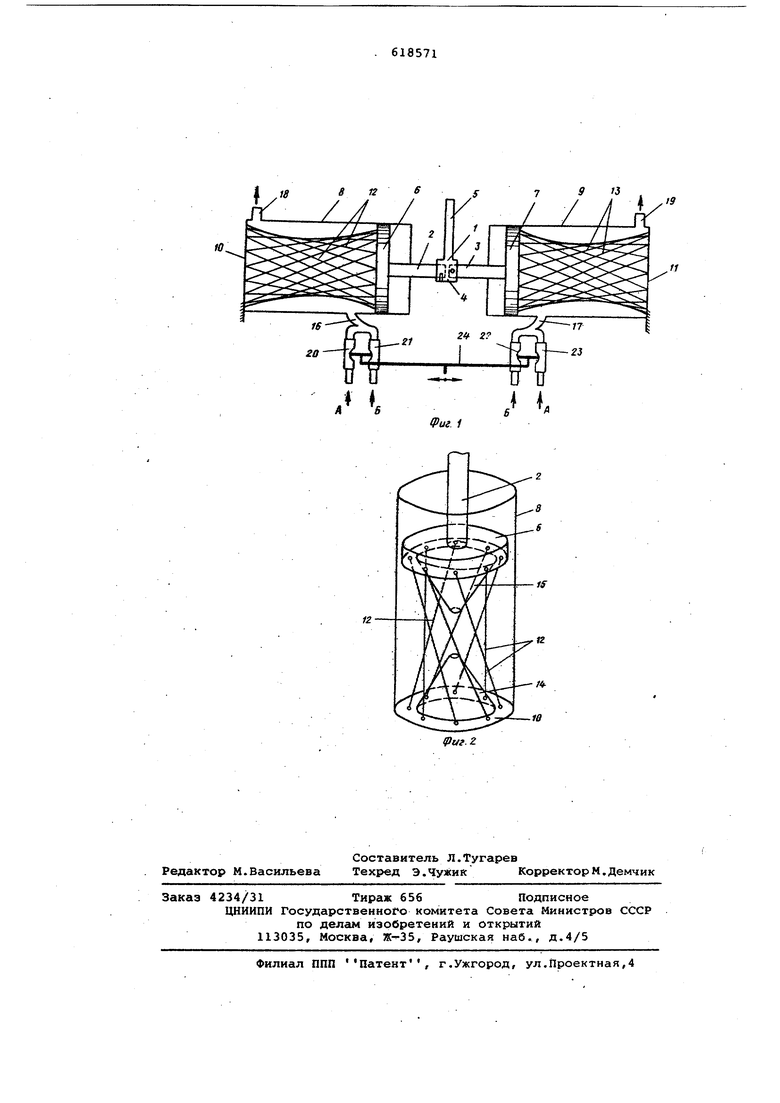
Изобретение относится к непосредственному преобразованию химической энергии в механическую работу, а име но к силовым приводам, например/для манипуляторов и автоматов химической технологии, чувствительных к изменению химического состава проточных сред. Известны силовые химико-механичес кие приводы с рабочим телом в виде SciMKHyToro в кольцо полимерного сократительного волокна, расположениого на нескольких шкивах 1 Кинематическая схема этого устрой ства не допускает получения движения шкивов более сложного, чем с одной вращательной степенью свободы. Наиболее близким по техническому решению к изобретению является силовой химико-механический привод, содержащий исполнительный элемент с неподвижно укрепленными на его противоположных концах поршнями, расположенными в цилиндрических рабочих камерах и соединенньФли с последними при помощи полимерных сократительньвс волокон, а камеры снабжены патрубками для входа и выхода среды, стимулирующей сокращение и удлинение волокон 2j. Недостатком этого устройства является то, что исполнительный элемент имеет одну степень свободы возвратно-поступательного движения вдоль оси/ совпадаквдей с осью рабочих камер привода. Целью изобретения является получение следящего поворотного и поступательного движения исполнительного элемента привода, а также уменьшение расхода стимулирующих сред. Указанная цель достигается тем, что полимерные волокна расположены с закруткой вокруг продольной оси привода, направление которой в каждой из камер противоположно направлению закрутки волокон другой камеры. Внутри камер в пространстве, охваченном волокнами, укреплены конусные заполнители. Такое выполнение устройства обеспечивает получение сложного движения исполнительного элемента привода, представляющего собой сумму его поступательного и вращательного перемещений и переходящего в чисто поступательное движение, вблизи крайних положений привода, при простом, с одной степенью свободы, движении управляющего органа (клапана, золотника), регулирующего подачусреды, стимулирукяцей сокращение и удлинени волокон. На фиг. 1 представлена схема при вода; на фиг. 2 - «сема расположени волокон и конусных эаполнителей в р бочей камере привода. Исполнительный элемент 1 привода выполнен в виде двух расположенных вдоль Общей оси штоков 2 и 3, соеди ненных .между собой втулкой 4 с водилом 5 и имеющих на противоположных концах поршни 6 и 7. Поршни б и 7 расположены в цилинд рических рабочих камерах 8 и 9. Флан цы 10 и 11 камер 8 и 9 соединены с поршнями 6 и 7.полимерными сократительными волокнами 12 и 13, прикрепг ленны1 ш по окружности к фланцам камер и поршням. В исходном состоянии волокна 12 камеры 8 расположены с закруткой вокруг продольной оси привода, направление которой противоположно направлению закрутки волокон 1 камеры 9. Для придания приводу устой чивости волокна 12 и 13 установлены с некоторым начальнымнатяжением. Для более полного использования объе ма каждой рабочей камеры и увеличения усилия привода волокна 12 и 13 могут быть расположены в несколько концентричных слоев. Внутри камер 8 и 9 в пространстве, охваченном волок нами 12 и 13, укреплены конусные заполнители 14 и 15. Камеры 8 и 9 снаб жены патрубками 16 и 17 для входа и патрубками 18 и 19 для выхода сред стимулирующих сокращение и удлинение волокон. На магистралях подачи стимулирующих сред имеются эластичные пережимные вставки 20-23, соединенные с общимуправляющим органом 24. В исходном состоянии управляющий орган 24 находится в среднем положении, при этом пережимные вставки 2023 перекрывают в равной степени проходные сечения для сред, стимулирующих сокращение и удлинение волокон. Привод работает следующим образом. При перемещении управляющего орГана 24 вправо происходит перекрытие проходных сечений вставок 21 и 23. и открытие проходных сечений вставок 20. и 22, вследствие чего увеличится приток среды А, стимулирующей удлинение волокон, в рабочую камеру в то время как в рабочую камеру 9 увеличится приток среды Б, стимулирующей сокращение волокон, что вызывает удлинение волокон 12 и сокращение волокон 13,перемещение исполнительного элемента 1 привода вправо и его поворот в направлении уменьшения закрутки волокон 13 и увеличения закр ки волокон 12. Поступательное и поворотное движение водила 5 исполнительного элемента 1 передается приводимому в действие механизму (на чертежах не показан). После исчезновения закрутки волокон 13 при дальнейшем перемещении управляющего органа 24 вправо вращение исполнительного элемента 1 привода прекратится, и он будет перемещаться дальше вправо поступательно. При перемещении управляющего органа 24 влево происходит обратное перераспределение подачи сред А и Б через эластичные вставки 20-23, что вызывает обратную деформацию волокон 12 и 13 и обратное движение исполнительного элемента 1 привода. Таким образом, при простом поступательном перемещении управляющего органа 24 обеспечиваетця сложное поступательное и вращательное следящее движение исполнительного элемента 1 привода. Изобретение позволяет упростить управление приводом, например манипулятора, уменьшить число приводов, необходимых для отработки заданного движения, при использовании нетрадиционного источника питания - разности химической энергии используемых стимулирующих сред. Формула изобретения 1.Силовой химико-механический привод, содержащий исполнительный элемент с неподвижно укрепленными на его противоположных концах поршнями, расположенными в цилиндрических рабочих камерах и соединенными с последними при помощи полимерных сократительных волокон, а камеры снабжены патрубками для входа и выхода среды, стимулирующей сокращение и удлинение волокон, отличающийся тем, что, с целью получения следящего поворотного и поступательного движения исполнительного элемента привода, полимерные волокна расположены с закруткой вокруг продольной оси привода, направление которой в каждой из камер противоположно направлению закрутки волокон другой камеры. 2.Привод ПОП.1, отличающийся тем, целью уменьшения расхода стимулирующих сред внутри камер в пространстве, охваченном волокнами, укреплены конусные заполнители. Источники информации, принятые во внимание при экспертизе: 1. Патент США 3.321.908, кл.бО-1, 1967. , 2. Беляков Р.В. Мышцеподобный . Приро;;а , 1975, 1, i с.42-47.
Фиг 1