(54) ВЕНТИЛЬШЙ ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления бесконтактным двигателем постоянного тока | 1974 |
|
SU705633A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
| Способ управления вентильным электродвигателем постоянного тока | 1989 |
|
SU1757039A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Устройство для управления реверсивным вентильным электродвигателем | 1981 |
|
SU1001415A1 |
| Реверсивный вентильный электродви-гАТЕль | 1979 |
|
SU813608A1 |
| Вентильный электродвигатель | 1973 |
|
SU660158A1 |
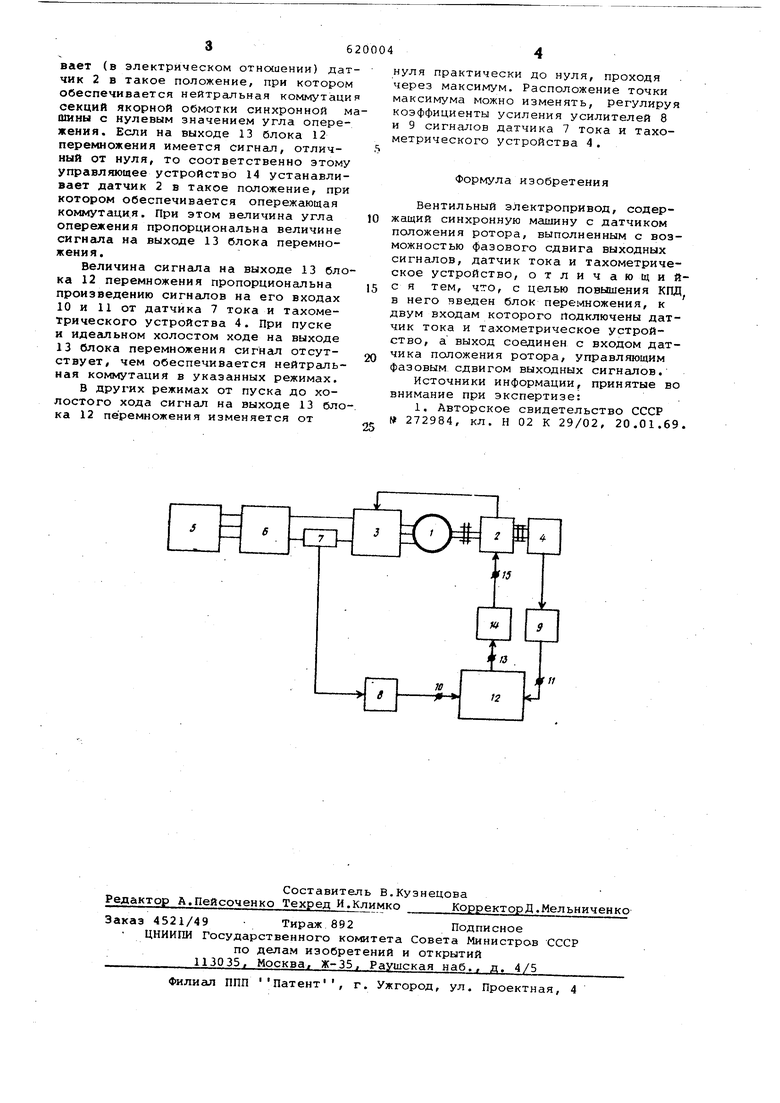
Изобретение относится к области электротехники. Известны вентильные электропривод содержаище синхронную машину, датчик положения ротора, выходная цепь кото рого подключена к полупроводниковому коммутатору через устройство, обеспечивающее фазовый сдвиг сигналов датчика положения; дополнительно на вход указанного устройства, включено тахометрическре устройство jl , в известных электроприводах обеспечивает ся монотонное увеличение угла опережения включения секций обмотки от нуля при пуске до максимального значения при холостом ходе. Однако таки электроприводы имеют низкий КПД, так как оптимальные значения углов опережения включения обеспечивацотся Тол ко для двух режимов, например для пускового и номинального. Целью изобретения является повышение КПД электропривода. Это достигается тем, что в предлагаемый элек тропривод введен блок пере «1ножения, к двум входам которого подключены датчик тока и тахометрическое устройство, а выход соединен с входом датчика положения ротора, управляющим фазовым сдвигом выходных сигналов., На чертеже дана блок-схема описываемого электропривода. Вентильный электропривод состоит КЗ синхронной машины 1 с датчиком 2 положения ротора, выходная цепь которого соединена с входом полупроводникового коммутатора 3. Электропривод снабжен также тахометрическим устройством 4 и получает питание от источника 5 трехфазного напряжения через выпрямитель 6. В цепь питания включен датчик 7 тока. Датчик 7 тока и тахометр ическое устройство 4 включены через усилители 8 и 9 на входы 10 и 11 блока 12 перемножения, выход 13 которого через управляющее устройство 14 подключен к входу 15 датчика 2 положения ротора. Электропривод работает следующим образом. Ключи коммутатора 3 по сигналам датчика 2 положения ротора коммутируют секции якорной обмотки синхронной машины 1. Величина угла опережения включения фазы определяется уровнем сигнала на выходе 13 блока 12 перемножения. При нулевом сигнале управляющее устройство 14 устанавливает (в электрическом относиении) дат чик 2 в такое положение, при котором обеспечивается нейтральная коммутаци секций якорной обмотки синхронной м шины с нулевым значением угла опережения. Если на выходе 13 блока 12 перемножения имеется сигнал, отличный от нуля, то соответственно этому управляющее устройство 14 устанавливает датчик 2 в такое положение, при котором обеспечивается опережающая коммутация. При этом величина угла опережения пропорциональна величине сигнала на выходе 13 блока перемножения. Величина сигнала на выходе 13 бло ка 12 перемножения пропорциональна произведению сигналов на его входах 10 и 11 от датчика 7 тока и тахометрического устройства 4. При пуске и идеальном холостом ходе на выходе 13 блока перемножения сигнгьп отсутствует, чем обеспечивается нейтральная коммутация в указанных режимах, В других режимах от пуска до холостого хода сигнал на выходе 13 бло ка 12 перемножения изменяется от нуля практически до нуля, проходя через максимум. Расположение точки максимума можно изменять, регулируя коэффициенты усиления усилителей 8 и 9 сигналов датчика 7 тока и тахометрического устройства 4. Формула изобретения Вентильный электропривод, содержащий синхронную машину с датчиком положения ротора, выполненным с возможностью фазового сдвига выходных сигналов, датчик тока и тахометрическое устройство, отличающийс я тем, что, с целью повышения КПД в него введен блок перемножения, к двум входам которого подключены датчик тока и тахометрическое устройство, а выход соединен с входом датчика положения ротора, управляющим фазовым сдвигом выходных сигналов. Источники информации, принятые во внимание при экспертизе: 1. Авторское свидетельство СССР 272984, кл. Н 02 К 29/02, 20.01.69.
