(54) МНОГОДВИГАТЕЛЬНЫЙЭЛЕКТЮПРИВОДС БЕСКОНТАЮНЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА
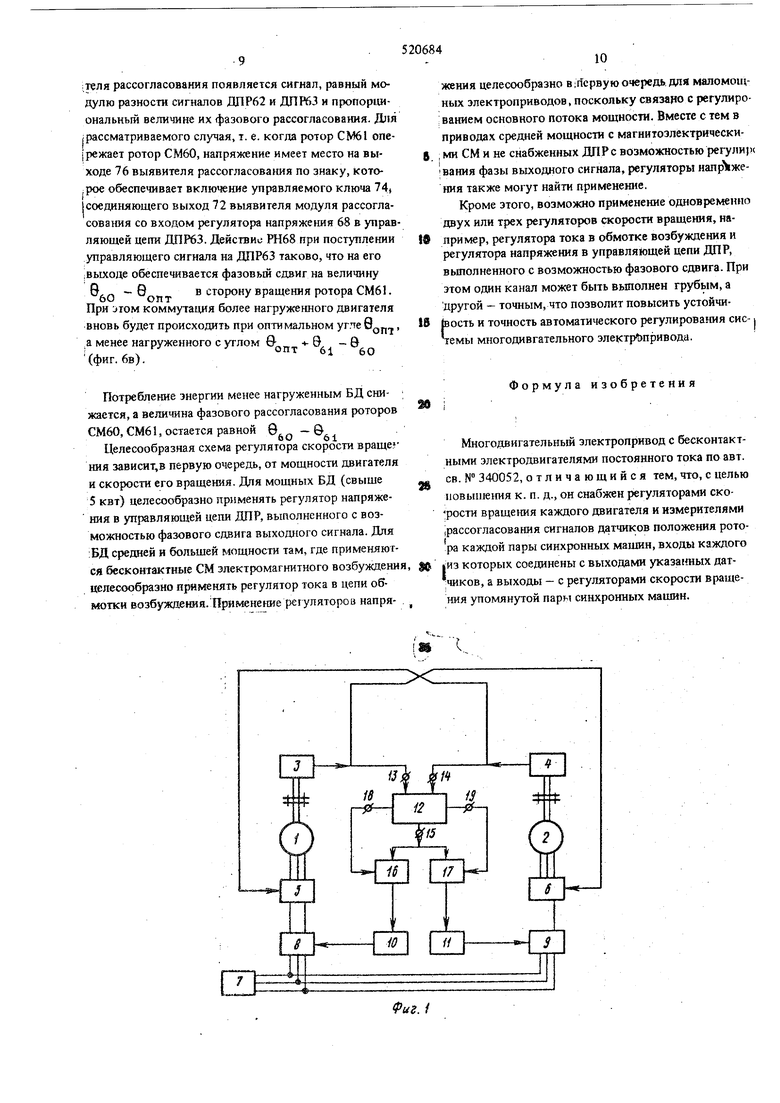
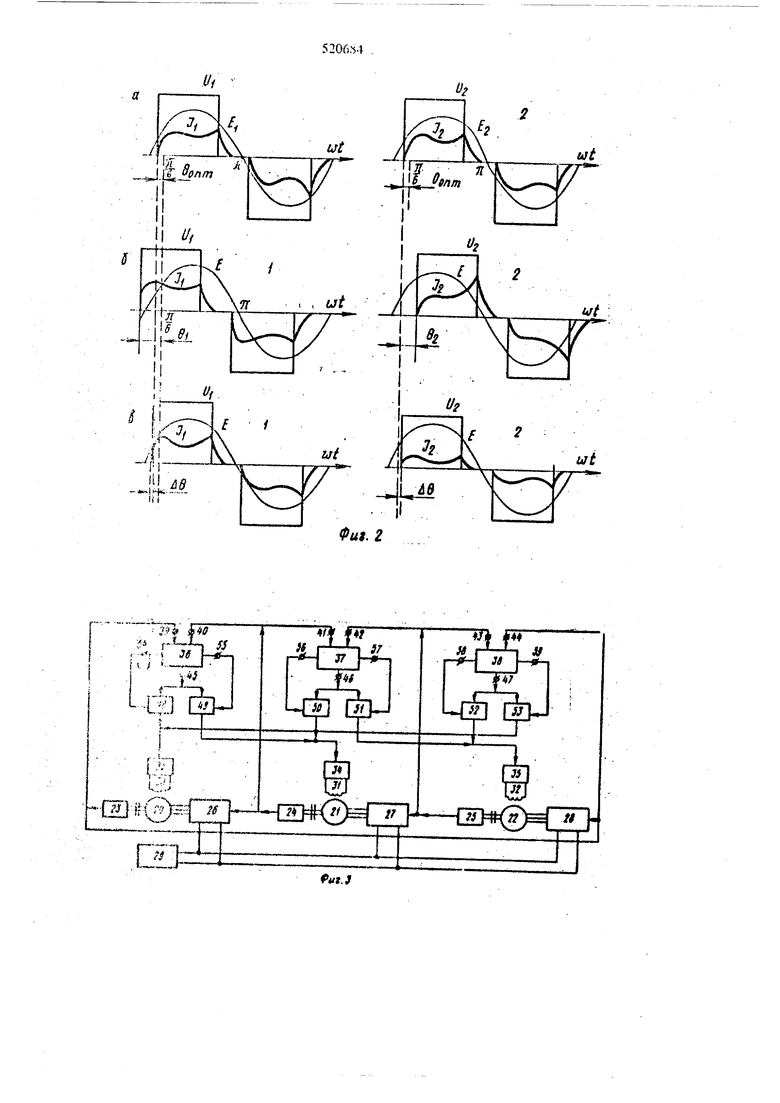
, Ш фиг. 1 изображена блок-схема двухдвигательного электропривода с БД с регуляторами скорости вращения, выполненными в виде регуляторов напряжения питания; на фиг. 2 диаграммы налряжений и токов в электроприводе, выполненном согласно фиг. 1;
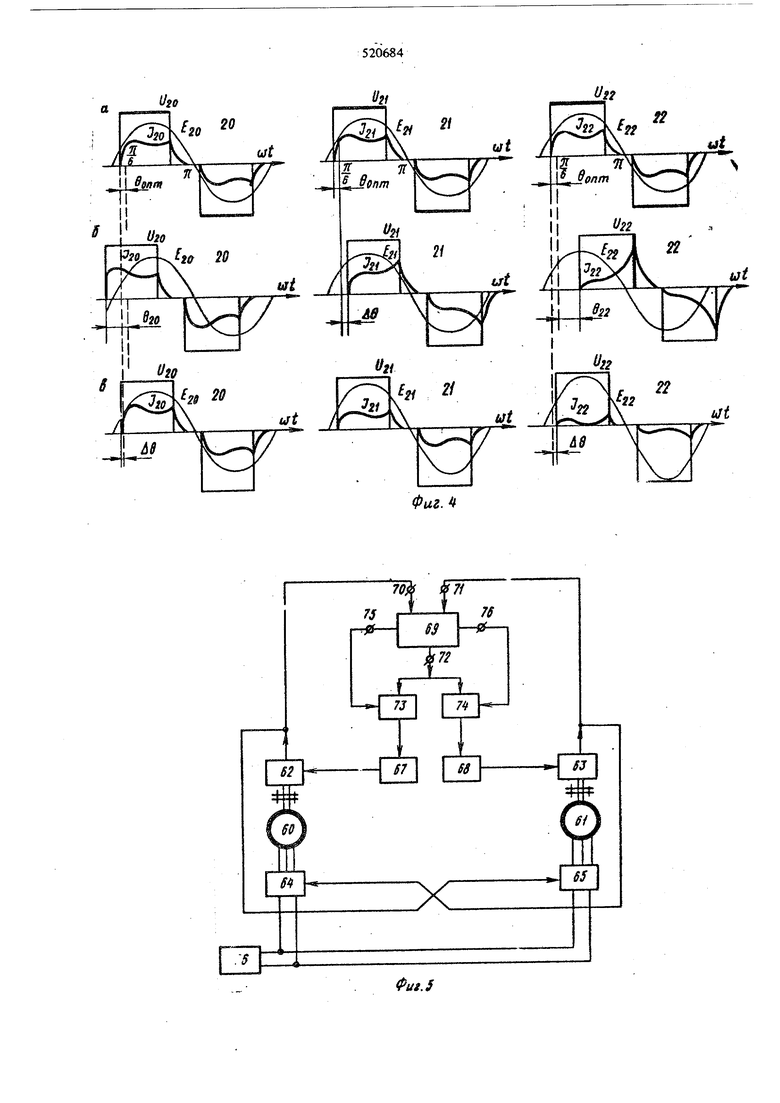
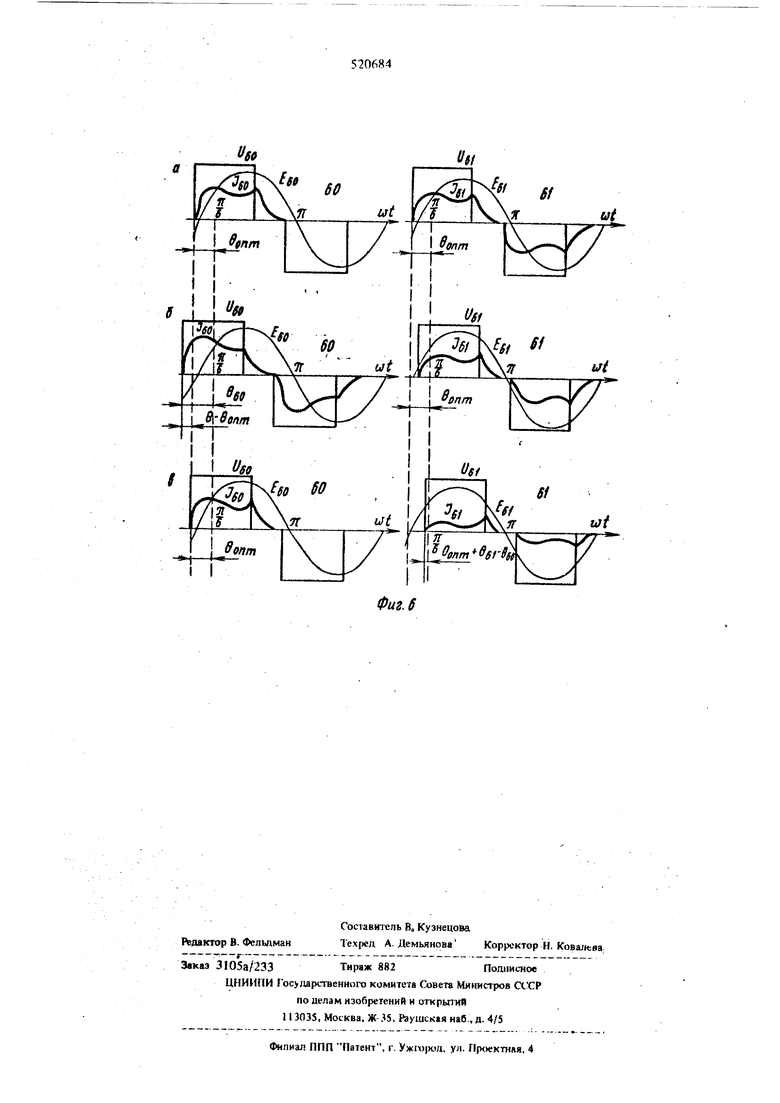
на фиг. 3- лок-схема трехдвитатепьного электрощжвода с БД с регулятором скорости вращения, выполненными в виде регуляторов токов в цепях обмоток возбуждения синхронных машин; на фиг. 4 - диаграммы напряжений и токов в электроприводе, вьшолненном согласно фиг. 3; на фиг. 5- то же, что на фиг. 1, только с регуляторами скорости вращеш1я, выполиенны1уш в виде регуляторов напряжения в управляющей цепи датшков положения ротора, вьг полненного с воэможностью фазового сдвига выходных сигналов; на фиг. 6- то же, что и на фиг. 2, толь- кй для электропривода, алшолненного согласно фиг.-5; Многодвигательньш электропривод выполнен еле- i дующим образом (фш. 1). Для примера здесь изображен электропривод с двумя БД, содержащими сиихронные мащины I и 2 с датчиками положения рото- : ра 3 и 4 и полупроводниковые коммутаторы S и 6, подключенные к i рехфазной сети переме1шогх) тока 7 через регуляторы скорости вращения, выполненнью В виде регулируе-дых вьшрямителей 8 и 9 со схемами управления 10 и 11.
Выход ДПР 3 подключен ко входу ПК6, а выход ДПР4 - ко входу ГЖ5, образуя кольцевую схему двухдвигательного электропривода. Электропривод снаРжеи выявите;юм 12 модуля м знака рассогласо: Baiffl сигнало ДПРЗ и ДПР4 пары синхрошп 1х ма- , НИН. В общем случае количество выявителей равно числу сочетаний и m по два и определяется по формуле JUL liJJ-. Для рассматриваемого
случая нужен один выявитель рассогласова1«я. К входам 13 и 14 вьпвителя 12 подключены выходы 1ЩРЗ и ДПР4. Выход 15 выявителя по модулю соеданей со схемами управления 10 и 11 выпрямителей { 8 и 9 через управляемые ключи 16 и 17, ко входам | которых подключены два выхода 18 и 19 вы- явителя рассогласования по знаку. , , Выявитель рассогласоваш1я по знаку может быть выполнен в виде логического устройства, состоящего из двух тртггеров и двух схем совпадения. Устройство такого типа регистрирует знак фазового рассогласования двух последовательностей импульсов, В зависимости от знака этого рассогласования меняется состояние
выходного триггера устройства. При разных частотах входных сигналов состояние выходного триггера будет зависеть от знака их разности.
При частоте враще}шя f СЦ1 большей, чем , СМ 2 на выходе 18 BbiRBH геля рассогласования по знаку (фиг. 1) появляется, напряжение, а на выходе 14--нулевой потрнииал, если f
то наоборот hfynii будет на выходе 1Я, а иапрял..,ше - на выходе 19.При,г1 вынкнгель oinxделяет знак фазового рассогласования этих частот. Если импульсы f отстоят от импульсов f , то появляется напряжение на выходе 19, а если наоборот, то импульсы f отстают от импульсов j , появляется напряжение на выходе 18. Вьшвитель знака рассогласования двух частот может быть вьшолнен и по другим известным схемам.
Выявитель модуля рассогласования двух частот может быть вьшолнен, например, на двух резисторах, имеющих общую точку. Iljsr нодаче напряжения с ДПР на эти резисторы на двух не объединенных концах появляется напряжение, пропорциональное фазовому рассогласованию этих сигналов. Если с ДПР поступает переменное напряжение, то при помощи де модулятора оно может быть вьшрямлено с целью получения модуля рассогласования этих сигналов.
При синфазности сигналов ДПРЗ и ДПР4 сигнал на выходе 15 выявителя рассогласования по модулю отсутствует.
Предлагаемый электропривод работает следующим образом.
Дня идентичных вентильных двигателей и при равных моментах нагрузки коммутация секций СМ1 и СМ2 осуществляется, например, с оптимальными утламр опережения включения .,,. (фиг. 2а). Роторы CMi и СМ2 вращаются синфазно, и на выходе 5 выявителя модуля рассогласования сигнал отсутствует. Схемы управления 10 и 11 обеспечивают, например, полное открытие тиристоров вьшрямителей 8 и 9 и на вьпсоде имеются равные вьшрямленныё; напряжения U и U трехфазной сети переменного тока. СМ1 и СМ2 потребляют равные токи 3 . и 3 при равных противо-эдс Е и Е Предположик« теперь, что момею- нагрузки на валу СМ2 уменьшился. В системе шюгодвигательного элек
тропрквода - прототипа в этом случае появляется фазовое рассогласование: ротор СМ2 опережает ротор СМ1, за счет чего коммутация более нагруженного вентильного двигателя происходит с отрицательным углом &J отличным от оптимального, а коммутация менее нагруженного вентильного двигателя - с положительным углом Q (фиг. 26). При этом менее нагруженный двигатель потребляет значительный ток
D, , что снижает к. п. д. электропривода. В предла t гаемом электроприводе при возникиове1 ии фазового
рассогласован; на выходе 15 вынаителя рассогласования появляется СИ1 ннл, равный модулю разности сигналов ЛПРЗ и и пропорщкиильн -и величине фазового paccoi-ласовалпч. JUiH рассмагрнваемого случая, т.е. когда ротор СМ2 опережаег ротор СМ1 Д1апряжение имеет место на Biiixd/ie 19 выявиг.мя рассогласования,которое обеспечивает нкдючение ключа 17, соединяющего выход ныявии-ля рассо ласонания по моду-, дю со схемой yiip;i)UkHH i 1 I.
Постуцдение си нада в управления обеспечивасг фазовую задержку уирппдкюиднх нмлульсов iHjHicTopoB выпрк.мпгеля 9, что приисдиг к снижению выпрямленного напряжения U j, . При этом уменьшается избыточный момент, развиваемый СМ2 и, как следствие, величина фазового рассогласоваш1я роторо СМ1 и СМ2 (фиг. 2в ).При достаточном коэффициeme усиления сигаала рассогласования вьшрямителем величина статической ошибки л 0 незначител .на. При уменьшении момента нагрузки на СМ1 выход 15 выявителя рассогласования по модулю подключается к схеме управления 10, обеспечивающей сниже.ние напряжения на выпрял-штеле 8. Если многодвигательный электропривод снабжен I многоканальным полупровощгиковым реле, обеспе чивающим периодическое включение кольцевой схеjMbi в Локально замкнутые схемы вентильных дви-, гателей, то предложенное устройство существенно ускоряет процесс синхронизации БД. Следовательно функция регулятора скорости . щенйя бесконтактного двигателя в предлагаемом многодвигательном электроприводе сводится к устранению избыточного момента менее нагруженного двигателя. В зависимости от мощности и конструкции примененных БД принципиально возможны три ;гш1а регулятора скорости : а) регулятор напряжения питания; б) регулятор тока обмотки возбуждения :СМ; в) регулятор напряжения в управляющей цепи ДПР, вьшолненного с возможностью фазового сдвига выходных сигналов. Пример вьшолнения многодвитательного электропривода с регуляторами напряжения питания БД в ввде улравляемь1Х вьшрямителей рассмотрен выше. Естественно, что в качестве регу;ляторов напряжения могут быть применены любые известные регуляторы амплитудного или широтноямпульсного действия. Так, для -ранзисторных однопол т1ериодных коммутаторов регулятор напряже:ния целесообразно выполнять в виде дополнительноiro транзистора, включенного последовательно с основными транзисторами, и диода, включетюго встре - )w.,г но источьшку питания и шунтирующего основные тран зисторЫ коммутатора и секции обмотки СМ. Такой регулятор аналогичен известной схеме нерек рсивного импульсного каскада с коллекторным двигателем |Постоянного тока. Для транзисторных днухполупериодных коммутаторов регулятор напряжения целесообразно вьшолнять на базе основных трапзясторов нижнего или верхнего плеча коммутатора, взаимодействуюишх с щиротно-импульспым модулятором Рассмотрим теперь построение многодвигательного электропривода с БД, у которых предусмотрены регуляторы тока в обмотках возбуждения СМ. Блок - схема такого электропривода с тремя БД представлена на фиг. 3. Здесь сохранены те же условные обозначе1шя, что и на фиг. 1. Вентильные двигатели содержат синхронные машины 20, 21 и 22 с дагшками положс1 ия 23, 24,25 и полупровод{шковые коммутаторы 26, 27, 28, подключенные к сети ПОСТОЯ1ШОГО тока 29. Выход ДЛР23 подалю- .. чен к вхолу ПК28, выход даР25 - к входу ПК27, а .выход ДПР24 - к вхо/:у ПК26, образуя кольцевую i схему трехдвнгательного электропривода. В цепях обмоток возбуждения (ОВ) 30, 31 и 32 синхронных .машин включены регуляторы тока (FT) 33,34,35. ; Электропривод ;дополня1ельно снабжен выявите:Пями 36, 37, 38 модуля и знака фазового рассогласования сигналов ДПР каждой пары СМ :з количеств, равном числу сочета1шй шСт-.И jp по два, т. е. трем. К входам 39 - 44 выявителей подключены выходы ДПР. К входам 39 и 44 - выход ДПР23, к входам 40 и 41 - выход ДПР24 н к входам 42 и 43 - выход ДПР25. Выходы выявителей рассохласования по модулю 45, 46 и 47 через управляемые |ключи 48 - 53 соединены с регуляторами тока 33 - 35, .причем вььход каждого выявителя рассогласования по (модулю, например 45, соединен с входами двух регу|ляторов тока (скорости вращения) сравь.шаемых :СМ20 и СМ21 через управляемые ключи 48 и 49. 0с;тальные соединения произведены аналогично. К входам управляемых ключей 48 - 53 подсоединены 54 - 59 выявителей рассогласования по знаку. |В сравнении с фиг. 1 видно, что стр)астура мзюгодвигательпого привода полностью сохраняется. Отличие заключается лишь в количественном увелич,:1Ц1и чис;ла выявителей рассогласова1 ия в общем случае рав{ном , т. е. числу сочетаний из венTifflbHbix двигателей по два, и в изменении типа регул яjTopa скорости, в качестве которого в данном случае при| менен регулятор тока в цепи обмотки возбуждения СМ. В дашюм устройстве все логические блоки вьшолнены аналогично описанным выше на примере устройства по фиг. 1,и выполняют те же функции и в той же последовательности. Например, если импульсы 20 ДПР23 синхронной машины 20 отстоят от импульсов frji СМ21, то пояиившееся .чалряжение на выходе 55 выявителя рассогласования ,по знаку включит управляемый ключ 49, и сигнал ;с выхода 45 выявителя рассогласования, равный модул о разности сигналов |зд и Jjj , поступит jB регулятор тока 34. Описанный электропривод работает следующим образом. Лля идентичных вентильных двигателей при равных нагрузки коммутация секций СМ20, СМ21 и СдМ22 осуществляетса,1|аир мер, с опTUMajibHbiNW улами опережения включения ; (фиг. 4а). Роторы СМ20, СМ21 и СМ22 вращаются синфазно и на выходах 45-47 выявителе рассогласования по модулю сигналы отсутствуют. Регуляторы тока 33, 34 и 35 обесиечииают, например, номинальную велиину тока во;лЗуж;;еиия, которому ссипиегствует при д:И11О;1 скорости « laiuciinHoniVik-.ietniuH величини э.д.с. Е (фиг,4а). ошшаковаи д,-|я ясеч CMOjo Еач HJJ. При р:шных .иьнх11игакия Ujo - Ull U ;i в CM IpoTOKUWI р-аПНЫС Пр ;;и С1;1Ож11.чг тоием,. токи 3
по моменты нагрузки на валах СМ21 и СМ22 умень- п шились, причем снижение момента нагрузки на СМ22 фоизошло в большей степени, чем на СМ21.;
В дастеме многодвигательного привода - прототи- j па в этом случае появляется фазовое рассогласование роторов СМ: ротор СМ22 опйре)1«ет ротор СМ21, а тот, в свою очередь, опережает ротор СМ20, за счет чегр коммутация более нагруженного вентильного двигателя происходит с отригательным углом в, отличным от оптимального, а коммутация менее нагруженных вентильных двигателей - с положительными ушами 21 и 9 (фиг. 46). При,этом менее нагруженные вентильные двигатели потребляют значительные токи Л д, и 3 , что снижает к. п. ц. электропривода. В предлагаемом электроприводе при возникновении фазового рассогласования poTopofB на выходах 45- 47 йыявителей рассогласования появляют-1 ся сигналы, равные модулю разности сигналов ДПР23 | .и ДПР24, ДПР24И ДПР25/ДПГ25 и ДПР23 и пропорщ ональные величинеих фазового рассогласования. Цля рассматриваемого|случая, при котором ротор СМ 22 опережает ротор СМ 21, а послеД1шй - ротор СМ 20, напряжею е появится на выходах 55,57 и 58 выявителей рассогласования 36-18. Будут включены управляемые ключи 49, 51 и 52. случае сигналы с выходов 45, 46 и 47 вь1явителей рассогласования по модулю будут поданы на входы регуляторов тока 34 и 35. Управляющим сигналом для РТ35 из двух сигналов с 46 и 47 будет тот, который имеет большую велишну В данном случае это сигнал с 47.
Причем величина сигнала, поступающего с 45 на РГ34, будет меньше, чем величина сигнала, поступаюп го на РТ35 с 47. Регуляторы тока выполнены таким образом, что поступление сигнала на их входы приводит к увеличению тока в обмотках возбужде1шя В данном случае в обмотке возбуждения 31 ток будет больше, чем в 30, а в 32 - больше, чем в 31, что при данной скорости приведет к измене1шю величин э. д. с Для рассматриваемого случая Е, ),-, Это обеспечивает уменьшение потребляемых токов ЗдвЗ , ycTpaHejffie избыточного
ь. cLь. к. О1
момента и компенсащ1ю фазового рассогласования i (фиг. 4в). При достаточном коэффициенте усиления сигнала рассогласования регулятором тока величина статической ошибки лв незначительна. При любых других ВОЗМОЖНЫ1Х рассогласова1шях в системе по моментам нагрузки в предлагаемом электроприводе обеспечивается непрерывная компенсация возникающего фазового рассогласования и устраненке изоыточного момента менее нагруже юго БД. . Регуляторы тока в цепях обцоток возбуждения могут быть построены по любой известной схеме амплитудного или ииротно-импульоного jifiicTBHH, иапри.мср, по схеме с во.чы;)добивоч11ым усгройсгвом.
Рассмотрим структурное аостросннс Miint cijinnraтельного привода для 1-лучия, п;:-1 i.;inopci-f i; кичостне рег лятора скоросш и кписнгп( niwNciioi гм унятир
в управляющей цепи Ш1Р, выполненного с возможностью фазового сдвига выхолньгх сигналов. Для упрощеш я изложе1Шя рассмотрим двухдвигательный привод (фиг.5), полагая, что в общем случае, по такой i схеме может быть реализован привод с tn вентильными двигателями. На фиг. 5 сохранены те же условные обозначе}гая, что на фиг. 1 и 3. Привод выполнен следуюпшм образом. Вентильные двигатели состоят из синхронных машин 60, 61 с дагшками положения ротора 62, 63, выполненными с возможностью фазового сдвига выходных сигналов, и полупроводлшковых коммутаторов 64, 65, получающих питание от источника постоянного тока 66. Выход ДПР62 подключен ко входу ПК65, а выход Ж1Р63 - ко входу ПК64, образуя кольцевую схему двухдвигательного электропривода. Регуляторь напряжения 67 и 68 в управляющих цепях ДПР62 и Д11Р63 обеспеадвают фазовый сдвиг выходных сигналов датчиков.
Электропривод дополнительно сгабжен выявителем 69 модуля и знака рассогласования, ко входам которого 70 и 71 подключены вььчгды ДПР62 и ДПР63
Выход 72 выявителя рассогласования по модулю соединен с регуляторами напряжения 67 и 68 чере управляемые ключи 73 и 74, ко входам которых подключены два других выхода 75 и 76 выявителя рассогласопания по знаку. В сравнеш1И с рассмотренными многодвигательными приводами по фиг. 1 и 3 видно, что структура привода полностью сохраняется, а изменен лишь тип регулятора скорости, в качестве которого применен регулятор напряжения в управляющей цепи ДПР, выполненного с возможностью фазового сдвига выходных сигналов. Здесь все логические блоки вьтолнены аналогично описанным выше на примере устройств по фиг. 1 и 3 и выполняют те же фу1 К1|Ш{ и в той же последовательности.
Описанный электропривод работает следующим образом. Для нндентишых бесконтактных двигателей при равных моментах нагрузки коммутадии секций СМ60 и СМ61 осуи ествляется, например, с оптималь.ными углами ©опт ( 6а). Роторы СМ60 и СМ61 вращаются си)фазно и на выходе 72 выявителя модуля рассогласования сигнал отсутствует.
Предаоложим теперь, что мсмент нагрузки на валу СМ61 уменьшился. В системе многодвигательного принода - прототипа в этом случае появляется фазовое рассогласоват(е: ротор СМ61 опережает ротор СМ60, за счет чего коммутация более нагруженного венгилыюго днигателя происходит с отрицательным углом Э,„ большим v-jT , а коммутация менее нагруженного - с другим углом &. , меньHJHM в,5пт (фиг. 66). Уход величины угла О-,-,-, от онгимальных знамений ариво/шт к снижеш ю к. п. д более iiai ружеплого дьигателн, и как, следствие, к. п. л. приво.па в целом.
В iipc/vi;ir;ie: i.iM )локГ}Ч011 ппи,че при возаикчговенин (jt,i:joiii40 (..ijL-t) ип выходе 72 выяви:.теля рассогласования появляется сигнал, равный модулю разности сигналов ДПР62 и ДПР63 и прюпорциональный величине их фазового рассогласования. Для (рассматриваемого случая, т. е. когда ротор CNf6l опе|режает ротор СМ60, напряжение имеет место на выходе 76 выявителя рассогласования по знаку, кото;рое обеспечивает вклюкниа управляемого ключа 74, соединяющего выход 72 выявителя модуля рассогласова1шя со входом регулятора напряжения 68 в управляющей цепи ДПР63. Действи1; РН68 при поступлении управляющего сигнала на ДПР63 таково, что на его |Выходе обеспечивается фазовый сдвиг на величину 9,Q - Gв сторону вращения ротора СМ61.
При этом коммутация более нагруженного двигателя вновь будет происходить при оптимальном угле QQJ, ,
д менее нагруженного с утлом ,о
опт (фиг. 6в).
Потребление энергии менее нагруженным БД снижается, а величина фазового рассогласования роторов СМ60,СМ61, остается равной 9,.-&,
Оч7о 1
Целесообразная схема регулятора скорости враще шя зависит,в первую очередь, от мощности двигателя и скорости его вращения. Для мощных БД (свыще
5 кат) целесообразно применять регулятор напряже НИН в управляющей цепи ДПР, вьтолненного с возможностью фазового сдвига выходного сигнала. Для ;БД средней и большей мощности там, где применяются бесконтактные СМ электромагнитного возбуждени целесообразно применять регулятор тока в цепи обмотки возбуждения. Применегае регуляторов напряжения целесообразно в дерную очередь для маломощных электроприводов, поскольку связано с регулиро; ванием основного потока мощности. Вместе с тем в приводах средней мощности с магннтозлектрически; мн СМ и не снабженных ДПР с возможностью регулирс вания фазы выходного сигнала, регуляторы напр жения также могут найти применение.
Кроме зтого, возможно применение одновременно двух или трех регуляторов скорости вращения, например, регулятора тока в обмотке возбуждения и регулятора напряжения в управляющей цепи ДПР, вьтолненного с возможностью фазового сдвига. При этом один канал может быть выполнен грубь1м, а другой - точным, что позволит повысить устойчиJeocTb и точность автоматического регулирования сие- j темы многодивгательного электропривода.
Формула изобретения
Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока по авт. св. № 340052, отличающийся тем, что, с целью повышения к. п. д., он снабжен регуляторами скорости вращения каждого двигателя и измерителями (Рассогласования сигналов датчиков положения ротора каждой пары синхронных MaiiiHH, входы каждого |Из которых соединены с выходами указанных датчиков, а выходы - с регуляторами скорости вращения упомянутой пары синхронных мащин. JiM Фиг. 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1991 |
|
SU1829101A1 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Многодвигательный электропривод | 1977 |
|
SU692050A1 |
| Вентильный электродвигатель | 1989 |
|
SU1809504A1 |
| Многодвигательный электропривод | 1972 |
|
SU445102A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Многодвигательный электропривод переменного тока | 1988 |
|
SU1661958A1 |
| ВПТБ | 1973 |
|
SU395956A1 |
| Многодвигательный электропривод опорно-поворотного механизма | 1981 |
|
SU955489A1 |
| Устройство для управления многодвигательным электроприводом переменного тока | 1987 |
|
SU1422358A1 |
)
го
E,n го
го
(jt
n
Uio 2Q 20
f
at
вго
%
f2S 2B
at
68
sSL
Ж7f
S onjTi
%
/
b
% /
I I
