Изобретение ргносигся к сепьскохо.зяйсгвенному машиностроению, в част ности к системам привода активных рабочих органов..
Известны приводы рабочих органов машин, в которых .,с целью исключения их перегрузок при работе, применяются фрикаиош1ые муфты, пробуксовывающие тфи встрече рабочего органа с участком по. вышенного сопротивления .
Такие механизмы имеют непроизводительные затраты энергии, обеспечивают снижение перегрузок рабочего органа за счет снижения качества обработки почвы, имеют, пониженный КПД.
Известны также приводы рабочих органов, включающие гидродвигатель, соединенный трубопроводами с насосом, передаточный механизм и маховик Г21.
Данное устройство является наиболее близким к изобретению по технической сущности и достигаемому результату.
Недостатком его является то, что маховик требует постоянных затрат энергии на азгон вращающихся масс одновременно с затратами энергии на привод рабочего органа, приводит к снижению динамических показателей системы (затруднен разгон рабочего органа до оптимальной частоты вр1лценин под нагрузкой ввиду необхо м ости .одновременного разгона маховика).
Целью изо етения является повышение эффективности работы за счет обеспечения блокировки передаточного механизма при встрече рабочего органа с непреодолимым препятствием.
Указанная цель достигается тем, что передаточный механизм выполнен в ваде
дифференциального механизма, соединяющего маховик с гндродвнгателем, причем вал маховика соединен с валом рабочего органа с помощью фрикционной муфты, а к напорному трубопроводу насоса через
предохранительный клапан подключен гид- роцнлинщ), шток которого соединен с рычагом выключешш фрикционной муфты.
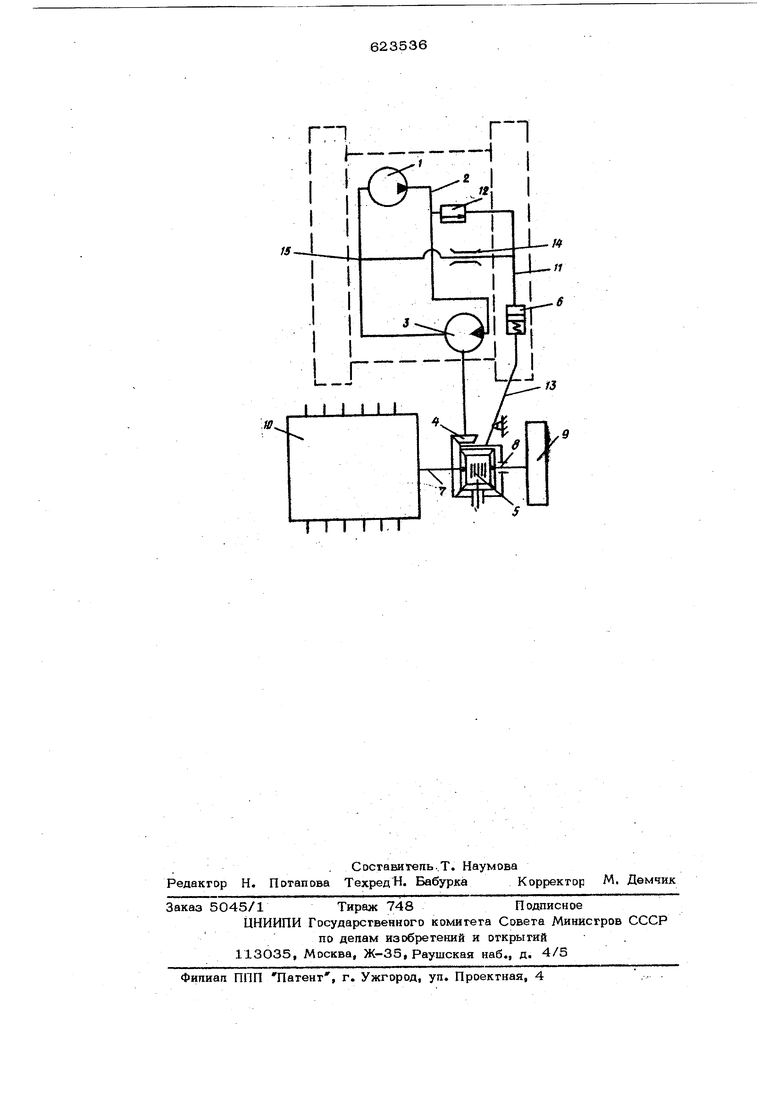
Такая конструкция привода рабочего органа обеспечивает преодоление перегру.эок рабочего органа, за счет запаса 3.6 энергии в маховике. В случае встречи с препятствиями, . вызьгаакшими остановку рабочето органа, его разгон осущ ествпяется за cчe кинетиче кой энергии предварительно разогн нного маховика. На чертеже схематично изображен приводротационного рабочего органа. Насос 1 соединен нап()рн{з1М трубопро 2 с гидродвигатепем 3дифферен- циапьного механизма 4, блокируемого с постоянно замкнутой фрикционной муфтой 5 блокировки, управляемой .гидроципиндром 6. На ведомых валах 7 и 8 дифференциальногб механизма уставовпены соответственно маховик 9 и рабочий орган iu. Гидроцилиндр, 6 магистралью 11 с предохранительным кл паном 12 и с рычагом 13 выключения фрикционной муфты.tj Магистраль 11сое диняется через жиклер 14 со всасывающей магистралью 15 насоса 1. Устройство работает следующим образом. Жидкость из гидронасоса 1 по напорному трубопроводу 2 поступает в гидродвигатель 3, который П1М1ВОДНТ во враще ние ведущий вал дифференциального механизма 4. Через шестерни дифференциала приводятся во вращение ведомые валы 7 и. 8, на которых установлен маховик .9 и рабочий орган 1О. Валы 7 и 8 соединены между собой постоянно замкнутой гидроуправляемой фрикционной муфтой 5. При встрече рабо« чего органа с незначитель.ным препятствием маховик 9 через вал 7, муфту 5 и вал 8 передает рабочему органу запасенную в нем кинетическу Ь энергию и преодолевает препятствие. При встрече с препятствием, вызываю щем остановку рабочего органа Ю и маховика 9, гидродвигатель 3 останавливается, давление жидкости в напорном трубопроводе 2 повышается, в результате чего предохранительный (Клапан 12 открывается, н жидкость по магистрали 11 поступает в гидроцилиядр 6, который посредством рычага 13 выключает муфту 5. Дифференциальный KfexaHHfflvi вступает в работу, в результате чего происходит раагой маховика до частоты вращения, превышающей 36 номинальную за счет передаточного числа дифференциала. После разгона MaxoBriWi давление в трубопроводе 2 понижается до номинального, клапан 12 зак)Ьываег ся, жидкость КЗ гидроцилиндра 6 по магистрали 11 через жиклер 14 поступает в магистраль 15, °в результате чего муфта 5 замыкается и вся накопленная в махойике 9 кинетическая.энергия вместе с крутящим моментом от гиДродвИ(Гателя 3 через вал 8 передается на рабочий орган 10, чем вызывается преодоление препятствия, и система начинает работать в номинальном режиме... Энергия маховика передается рабочему органу при его непреодолимых нагрузках, в случае незначительных перегрузок кинетическая энергия маховика помогает I рабочему органу преодолеть препятствие. Система работает автоматически в случае возникновения перегрузок, обеспечивает высокое качество обрабатываемой поверхности и полное использование энергии. Ф ормула изобр етения Привод ротационного рабочего органа, включающий гидродвигатель, соединешгый трубопроводами с насосом, передаточный механизм и маховик, отличаю щи йс я тем, что, с целью повьпнения эффективности работы за счет обеспечения блокировки передаточного механиет а при встрече рабочего органа с непреодолимым препятствием, передаточный механизм выполнен в виде дифференциального механизма, соединяющего маховик с гидродвигателем, причем вал маховика соединен с валом рабочего органа с помощью ционной муфты, а к напорному трубопроводу насоса через предохранительный клапан подключен гидроцилиндр, шток которого соединен с рычагом выключения икционной муфты. Источники информации, принятые во внимарие при экспертизе: 1.Авторское свидетельство:. СССР № 209865, кл. А О1 В 13/04, 1966. 2.Патент США№ 377О322, кл. 299-37, 1973.
13
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование землеройной машины | 1983 |
|
SU1199865A1 |
| Объемная гидромеханическая передача землеройной машины | 1982 |
|
SU1059093A1 |
| Рекуперативный гидропривод | 1960 |
|
SU149067A1 |
| Гидромеханическая трансмиссия транспортного средства | 1987 |
|
SU1458256A1 |
| УСТРОЙСТВО ДЛЯ РЕКУПЕРАЦИИ ЭНЕРГИИ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2193977C2 |
| Винтовой пресс-молот | 1984 |
|
SU1265009A1 |
| Гидравлический привод землеройнойМАшиНы НЕпРЕРыВНОгО дЕйСТВия | 1979 |
|
SU836300A1 |
| Гидромеханическая передача транспортного средства | 1975 |
|
SU596493A1 |
| Бесступенчатая передача | 1985 |
|
SU1348585A1 |
| Прижимное устройство скважинного прибора | 1985 |
|
SU1332005A1 |
Т I I II
