Изобретение относится к синхронноследящим системам передачи информации.
Известны синхронно-следящие устройства для дистанционной передачи перемещений, содержащие датчики и приемники, соединенные линиями синхронизации flj.
Недостаток таких устройств состоит в невозможности передачи пространственных перемещений по трем координатам.
Наиболее близким по техническому решению к изобретению является устройство для дистанционной передачи пространственных перемещений, содержащее датчик и приемник, выполненные в виде подвижных магнитопроводов и неподвижных магнитопроводов, с секционными обмотками возбуждения, подключенных через трансформатор к шинам питания, и с секционными обмотками синхронизации, соединенными встречно 2
Недостатком этого устройства является ограниченная область применения, обусловленная тем, что устройство имеет только одну степень свободы.
Целью изобретения является расширение диапазона рзаботы устройства и передача перемещений по трем координатам.
Это достигается за счет того, что в предлагаемом устройстве подвижные маг- нитопроводы датчика и приемника выполнены в виде куба, против граней которого расположены по шесть П-образных неподвижных магнитопроводов, на каждом из которых расположены по одной секции обмотки синхронизации и обмотки возбуждения, все секции обмотки синхронизации соединены последовательно согласно, а все секции обмотки возбуждения соединены попарно встречно, средние точки соединения каждой пары секций обмотки возбуждения соединены с вторичными обмотками трансформатора.
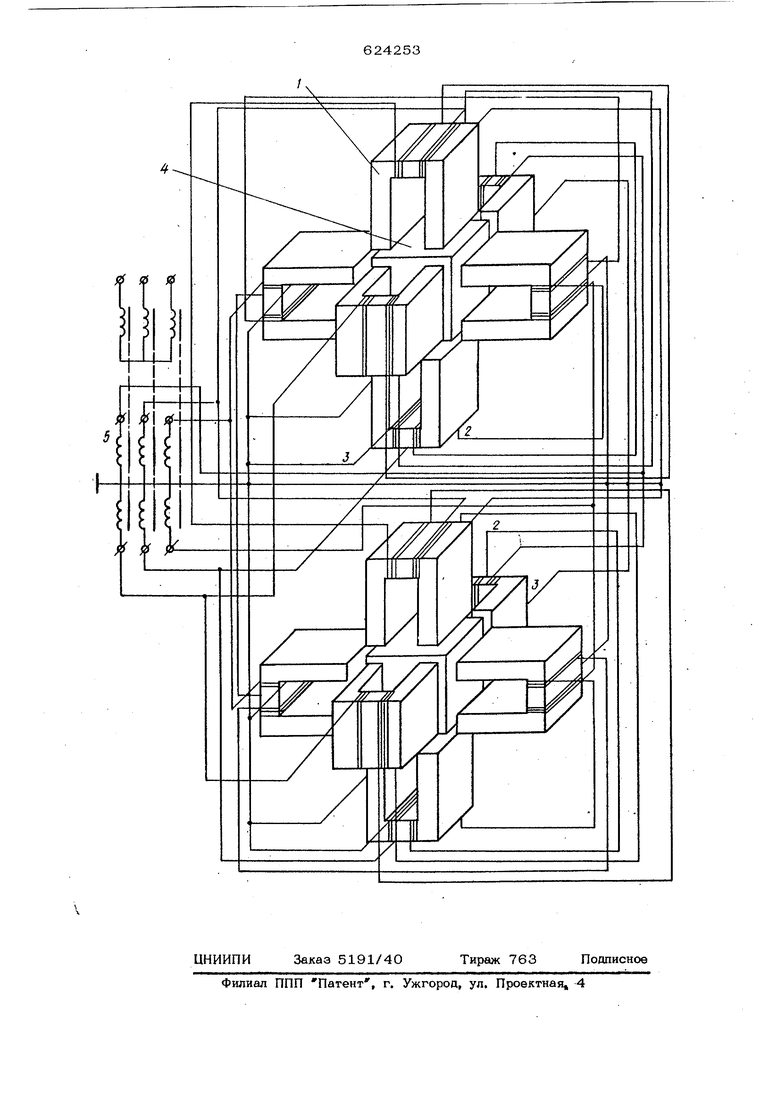
На чертеже приведена схема устройства для дистанционной передачи пространственных перемещений, где в качестве датчика и приемника служат ферродинамические преобразователи с одинаковыми геометрическими и электрическими парамет. рами. Устройство состоит из шести П-образных неподвижных магпитопроводов 1, датчика и гГриемннка, расположенных попарно во взаимно перпендикулярных направлениях, на каждом из которых размещены по одной секции обмотки синхронизации 2 и по одной секции обмотки возбуиодения 3, и подвижный магпнтопровод 4, выполненный в виде куба из амор:})ного ферромагнитного материала и подвешенного на шести спиральных пружинах к каждому из шести П-образных магнитопроводов 1. Все шесть секций обмотки синхронизации датчика или приемника соединены между собой последовательно согласно, обмотки синхро низации 2 датчика и приемника включены встречно, Сегшии обмотки возбу адения 3 каждой пары йеподвюкных магнитопроводов 1 соедтюны мехщу собой также последовательно согласно и включены в трехфазную сеть через трехфазный трансформатор 5, причем, средние точки вторичных обмоток трапсформатора 5 соединены со средними точками попарпо-соещшенных секций обмотки возбу 1{де)гия 3 и заземлены. Рабочие поверхности неподвижных П-образ- ных магнитопроводов 1 обращены к граням куба и {исположены на одинаковых расстояниях так, чтобы соблюдалась пространственная ciiMMeTpiiH. Геометрические размеры преобразователя выбраны таким образом, чтобы при максимальном тангенциальном перемещении подвижной части относительно полюсных наконечников какого-либо неподвижного магнитопровода обес печ1шалось полное перекрытие его рабочей поверхности гранью куба. npimmm работы устройства заключается в след аошем. При отклонении подвижной части датчика от нулевого полои ения на некоторое расстояние в пространстве происходит изменение взаимных индуктивностей между секциями обмотки возбуждения 3 и секциями обмотки синхронизации 2, вследствие чего на выходных ютеммах включенных, попарно секций обмотки синхронизации 2 возникает напряжение, пропорциональное величш1ам отклонения подвижной части вдоль соответствующих осей прямоугольной системы координат. Поскольку секции обмотки синхронизации 2 включены между собой последовательно, то суммарное значение возникших напряжений представляет собой векторную сумму трех взаимно перпендикулярных векторов. Ориентация и длина полученного вектора напряжения зависит соответственно от направитения и величины перемещения подвижной части датчика. В свою очередь, напряжение обмотки синхронизации датчика создает ток в обмотке с1тхронизации приемника, который, взаимодействуя с потоком возбуждения, создает сипу, действующую на подвижную часть приемника таким образом, что она занимает положение, аналогичное подвиясной части датчика. Величшга отклонения подвижной части приемника при этом зависит еще от жесткости спиральных пружин, которые могут быть подобраны так, чтобы положения подвижных частей датчика и приемника полностью соответствовали. Формула изобретения Устройство для дистанционной передачи пространственных перемещений, содержащее датчик и приемник, выполненные в виде подвижных магнитопроводов и неподвижных магиитопроводов с се1щионными ,)бмотками возбуждения, подключенных через трансформатор к шинам питания, ,и с секционными обмотками синхронизации, соединенными встречно, отличающееся тем, что, с целью расширения диапазона устройства, подвижные магнитопроводы датчика и приемника выполнены в виде куба, против граней которого расположены по шесть П-образных неподвижных магнитонроводов, на каждом из которых расположены по одной секции обмотки синхронизации и обмотки возбуждения, и все секции обмотки синхронизации соединены последовательно согласно, а все секции обмотки возбуждения соединены попарно встречно, средние точки соед1теиия каждой пары секций обмотки возбуждения соединены с вторичными обмотками трансформатора. Источники информации, принятые во внимание при экспертизе: 1.Бабаева Н. Ф. и др. Расчет и проектирование элементов гироскопических устройств , 1967, с. 333-334. 2.Авторское свидетельство СССР № 216814, кл. Q 08 С 9/04.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угловых перемещений | 1976 |
|
SU728150A1 |
| Устройство для дистанционной передачи пространственных перемещений | 1978 |
|
SU752445A1 |
| Устройство для дистанционной передачи перемещений | 1984 |
|
SU1180954A1 |
| Магнитомодуляционный линейный сельсин | 1975 |
|
SU598192A1 |
| Линейный сельсин | 2017 |
|
RU2678724C1 |
| Устройство для дистанционного определения положения объекта | 1983 |
|
SU1211596A1 |
| Многополюсный вращающийся трансформатор | 1982 |
|
SU1095320A1 |
| Устройство для контроля погрешности вращающегося трансформатора | 1973 |
|
SU474835A1 |
| Линейный сельсин | 1974 |
|
SU597050A1 |
| Устройство для дистанционной передачи перемещений | 1982 |
|
SU1062755A1 |