00
о со ел
4
Изобретение .относится к промышленным автоматическим устройствам контроля и упра;вления, в частности к роботостроению для создания узлов с тремя степенями свободы.
Цель изобретения - расширение области применения устройства.
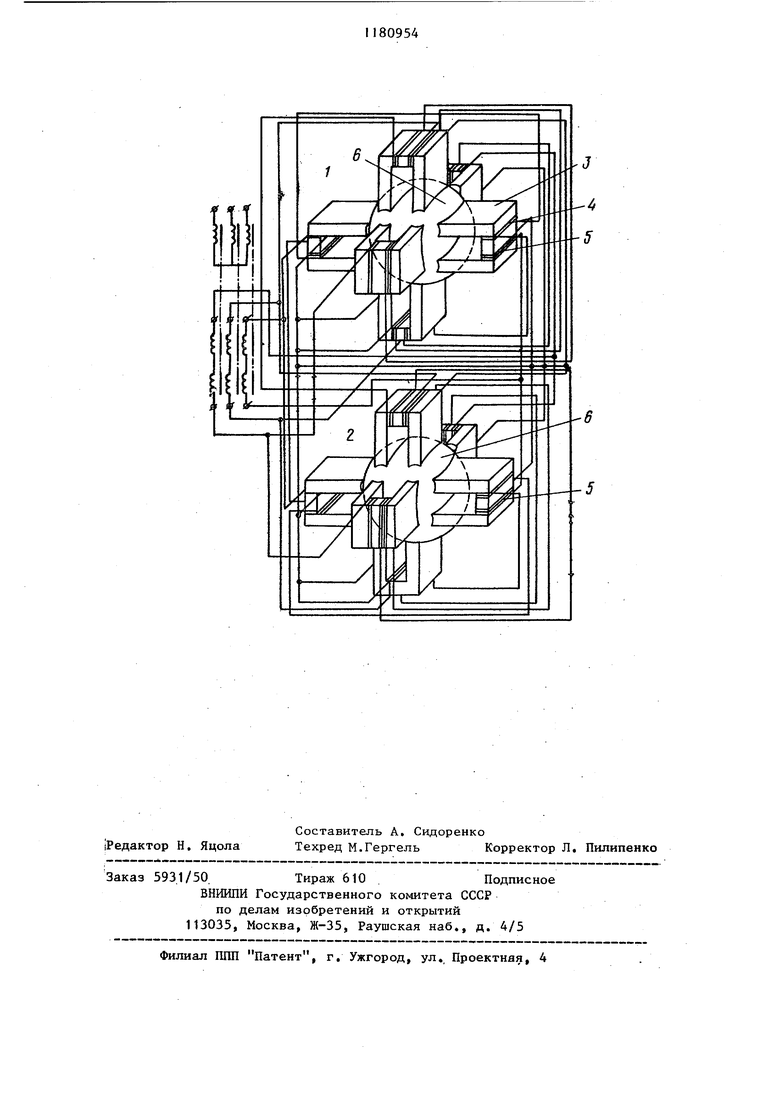
На чертеже приведена конструкция устройства для Дистанционной передачи угловых перемещений,
Устройство содержит датчик 1 и приемник 2, каждый из которых содержит по шесть П-образных .магнитопроводов 3 со сферическими, рабочими поверхаостями, расположенных попарно вовзаимно перпендикулярных напралениях, на каждом из которых размещены по одной обмотке 4 синхронизации и по одной обмотке 5 возбуждения, . подвижный элемент 6, вьтолненный в виде шара из ферромагнитного материала, помещенный эксцентрично в шар из немагнитного материала и расположенный между рабочими поверхностями П-образных магнитопроводов 3. Все шесть обмоток 4 синхронизации датчика 1 и приемника 2 соединены между собой последовательно согласно последовательно соединенные обмотки 4 датчика 1 соединены с последовательно соединенными обмотками 4 приемника 2 встречно, обмотки 5 воздуждения каждой .пары П-образных магнит опроводов соединены между собой также последовательно согласно и питаются трехфазньп-i током. Рабочие поверхности неподвижных П-образных магнитопроводов 3 обращены к поверхности подвижного элемента 6 и расположены на одинаковых расстояниях так чтобы соблюдалась пространственная симметрия.
Устройство для дистанционной передачи перемещений работает следующим образом.
При повороте подвижного элемента 6 датчика 1 относительно условного нулевого положения на некоторый угол в пространстве происходит перераспределение взаимных индуктивностей между обмотками 5 возбуждения и об--мотками 4 синхронизации. Вследствие этого на выходных клеммах включенных попарно обмоток 4 синхронизации,расположенных вдоль соответствующих осей координат, возникают напряжения, величина которых зависит от угл поворота подвижного элемента6 относительно условного нулевого положения в прямоугольной системе координат. Поскольку обмотки 4 синхронизации датчика 1 включены меявду собой последовательно, то суммарное значение возникающих напряжений представляют собой векторную сумму трех взаимно перпендикулярных векторов. Ориентация полученного вектора напряжения зависит, соответственно, от направления поворота подвижного элемента 6 датчика 1. В свою очередь напряжение обмотки 4 синхронизации датчика 1 создает ток в обмотку 4 синхронизации приемника 2, который, взаимодействуя с потоком возбуждения, создает силу, -действующую на подвижный элемент 6 приемника 2 таким образом, что она занимает положение, аналогичное положению подвижного элемента 6 датчика 1, При линейном отключении подвижного элемента 6 от нулевого положения на некоторое расстояние в пространстве происходит также изменение взаимных индуктивностей между обмотками 5 возбуждения и обмотками 4 синхронизации, вследствие чего на вькодных клеммах включенных попарно обмоток 4 синхронизации возникает напряжение, пропорциональное величинам отклонения подвижного элемента 6 вдоль соответствующих осей прямоугольной системы координат,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи пространственных перемещений | 1976 |
|
SU624253A1 |
| Устройство для дистанционной передачи угловых перемещений | 1976 |
|
SU728150A1 |
| Линейный сельсин | 2017 |
|
RU2678724C1 |
| Устройство для дистанционной передачи пространственных перемещений | 1978 |
|
SU752445A1 |
| Устройство для дистанционной передачи перемещений | 1980 |
|
SU902048A1 |
| Устройство для дистанционной передачи перемещений | 1982 |
|
SU1062755A1 |
| ИНДУКТИВНЫЙ ДАТЧИК для КОНТРОЛЯ ПОЛОЖЕНИЯ подвижных ШАХТНЫХ ОБЪЕКТОВ | 1968 |
|
SU219134A1 |
| Преобразователь перемещений в код | 1988 |
|
SU1559406A1 |
| ТРЕХОСНЫЙ ГИРОМОТОР | 2004 |
|
RU2275601C1 |
| Вычислительное устройство | 1977 |
|
SU641460A1 |
УСТРОЙСТВО ДЛЯ дастАНционНОЙ ПЕРЕДАЧИ ПЕРЕМЕЩЕНИЙ, содержащее соединённые линией связи датчик и приемник, каждый из которых выполнен в виде шести П-образных магнитопроводов, на каждом из которых расположены обмотка возбуждения и обмотка синхронизации, и подвижного элемента, расположенного между П-образными магнитопроводами, отличающееся тем, что, с целью расширения области применения устройства, подвижный элемент в датчике и приемнике выполнен в виде шара из немагнитного материала, внутри которого эксцентрично расположен шар из ферромагнитного материала, а рабочие поверхности П-образных магни б топроводов выполнены сферическими. О)
| ЛИНЕЙНЫЙ СЕЛЬСИН | 1967 |
|
SU216814A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Устройство для дистанционной передачи пространственных перемещений | 1976 |
|
SU624253A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
