Изобретение предназначено для использования в системе автоматиче кого контроля и управления, в част ности для аналогового контроля параметров плоского объекта. Известны устройства для дистанционной передачи перемещений, имею щие две степени свободы . Наиболее близким к предлагаемом по конструкции является устройство для дистанционной передачи перемещ ВИЙ в прямоугольной системе координат, содержащее два преобразователя перемещений - датчик и приемник, каждый из которых содержит статор, состоящий из трех С-образных неподвижных магнитопроводов, выполненных в виде секторов с углом 120, и ротор, выполненный в в де диска из магнитомягкого материала и установленный между рабочими поверхностями статора. Неподвижные магнитопроводы статора снабжены ка тушками возбуждения, соединенными между собой по схеме звезда и подключенными к шинам трехфазного переменного тока, образуя обмотку возбуждения, и рабочие катушки, вк ченные между собой последовательно согласно по схеме открытого треуг ника, образуя рабочую обмотку. Ра бочие обмотки датчика и приемника между собой включены встречно 2J . Недостатком известного устройст является малая точность работы, обусловленная нелинейной зависимос синхронизирующей силы от величины перемещений. I Целью изобретения является повышение точности работы устройства для дистанционной передачи перемеще НИИ в прямоугольной системе координат. Поставленная цель достигается тем, что в устройстве для дистанционной передачи перемещений, содержащем линию связи, передатчик и при емник , выполненные каждый в виде ротора и статора, в пазах статоров расположены обмотки возбуждения, подключенные к трехфазной сети пере менного тока, и однофазные обмотки статоры выполнешл прямоугольными с двумя системами взаимно перпендикулярных пазов, в каждом из которых расположены два провода обмотки возбуждения и два Провода однофазной обмотки, роторы выпрлнешл в виде параллелепипедов и расположёны над пазами статоров, однофазные обмотки передатчика соединены после довательно и через линию связи с последовательно соединенными однофазными обмотками приемника. На чертеже представлена схема устройства для дистанционной переда чи перемещений в прямоугольной сиетеме координат. Устройство содержит датчик 1 и приемник 2 перемещений, имеющие одинаковые геометрические и электрические параметры. Каждый из них содержит статор 3 прямоугольной формы с двумя системами взаимно перпендикулярных пазов вдоль , координатных осей X и Y ротор 4, выполненный в виде параллелепипеда : и расположенный над статором. Две трехфазные обмотки возбуждения W и WY расположены в пазах статора соответственно вдоль координатных осей X и Y . Две рабочие обмотки V/g и VJg расположены в тех же пазах статора и включены между собой последовательно согласно. Каждая обмотка возбуждения и рабочая обмотка содержит по три катьшки, . уложенные распределенно в одни и те же пазы соответствующих фаз, причем каждая пара катушек занимает 1/3 общего числа пазов. Рабочие обмотки могут включаться в/ двух равноценных в электрическом отношении вариантах: когда рабочие, обмотки датчика и приемника соответствующих координатных осей X и V ; соединяются между собой автономно посредстве четырех проводов, образуя два канала связи; когда рабочие обмотки датчика соединяются между ; собой последовательно, обеспечивая два общих вывода и посредством двух проводов подключаются к двум выводам аналогичным образом соединенных рабочих обмоток приемника, образуя один канал связи. Принцип работы устройства заключается в следующем. При подключении к шинам трехфазного переменного тока обмотки возбуждения датчика, расположенной вдоль координатной оси X , вдоль этой координатной оси возникают три пульсирующих магнитных поля, имеющие фазовый сдвиг друг относительно друга, равный 120°. Витки катушки возбуждения уложены в пазах таким образом, что действующее значение индукции магнитного поля при отсутствии подвижной части в любой точке рабочей поверхности статора устанавливается одним и тем же, поэтому в рабочих катушках, расположенных вдоль этой ко.ординатной оси, наведенные ЭДС одинаковы по модулю и сдвинуты по фазе на 120 . Следовательно, на выходных клеммах этой рабочей обмотки напряжение равно нулю. Если на поверхности статора расположить ротор, то в области перекрытия ротором между витками катушки возбуждения и рабочей катушки взаимная индуктивность увеличивает- ся, что обуславливает появле ие
напряжения на выходных клеммах рабочей обмотки датчика, причем величина этого напряжения по модулю не меняется при перемещении ротора вдоль оси X , в то время как его фаза- меняется в пределах от О до 360 при перемещении центра ротора от начала до конца рабочей обмотки .
Аналогично на выходных клеммах рабочей обмотки приемника, расположенной вдоль координатной оси X, возникает напряжение Разность этих напряжений &U|( Оха Охп в рабочей обмотке приемника создает ток синхронизации t i, который, взаимодействуя с магнитным полем, создает силу f X , действующую на ротор приемника таким образом, чтобы последний занял Вдоль координатной оси X такое же положение, что и ротор датчика.
Точно так же при подключении к шинам переменного тока обмоток возбуждения датчика и приемника, расположенных вдоль координатной оси Y и при перемещении ротора датчика вдоль этой оси, на выходных клеммах этих рабочих О5.МОТОК возникают напряжения (Tyj Uy соответственно, разность которых создаст в рабочей обмотке приемника, расположенной вдоль этой координатной оси, ток синхронизации 1 у г обуславливающий
0 силу f( . Под действием этой силы ротор приемника занимает вдоль координатной осиY такое же положение, что и ротор датчика.
В рабочем режиме устройства пере5 мещение ротора приемника в прямоугольной системе координат обеспечивается равнодействующей двух
PV в зависимости 6т направсил
- ления и величины перемещений ротора
датчика.
Предложенное устройство обладает более высокой точностью аналогового контроля параметров плоского объекта,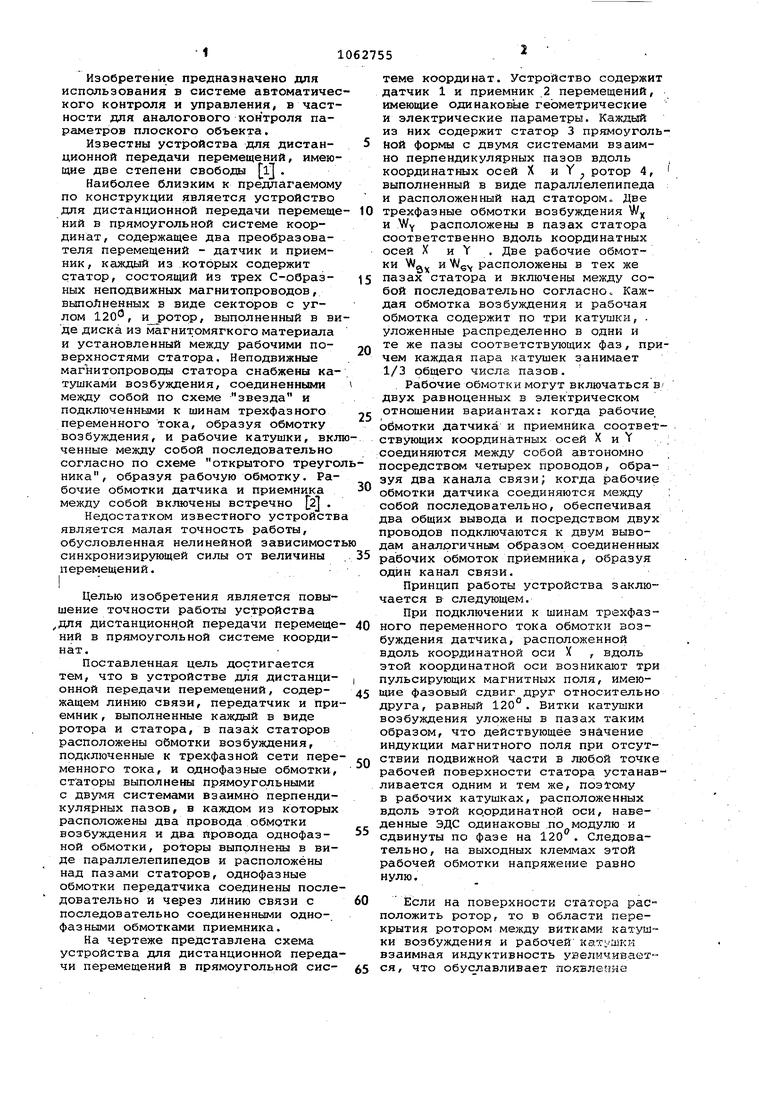
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угловых перемещений | 1976 |
|
SU728150A1 |
| Устройство для дистанционной передачи перемещений | 1980 |
|
SU902048A1 |
| Электропривод | 1979 |
|
SU875566A1 |
| БЕСКОНТАКТНЫЙ СОВМЕЩЕННЫЙ СЕЛЬСИН-ДВИГАТЕЛЬ(МОТОСИН) | 1970 |
|
SU287176A1 |
| Устройство для дистанционной передачи угловых перемещений | 1981 |
|
SU964695A1 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ПЕРЕМЕЩАЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2005 |
|
RU2314625C2 |
| Индукционная система синхронной передачи угла поворота | 1935 |
|
SU48684A1 |
| Устройство для однофазной индукционной синхронной передачи угла | 1937 |
|
SU55166A1 |
| Самовозбуждающийся двухчастотный генератор | 1980 |
|
SU868937A1 |
УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ ПЕРЕМЕЩЕНИЙ, содержащее линию связи, передатчик и приемник , выполненные каждый в виде ротора и статора, в пазах статоров расположены обмотки возбуждения, подключенные к трехфазной сети переменного тока, и однофазные обмотки, о.тличающееся тем, что, с целью повышения точности устройства, статоры выполнены прямоугольными с двумя системами взаимно перпендикулярных пазов, в каждом из которых расположены два провода обмотки возбуждения и два провода однофазной обмотки, роторы выполнены в виде параллелепипедов и расположены над пазами статоров, однофазные обмотки передатчика соединены последовательно и через линию связи с последовательно соединенными однофазными обмотками приемника.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для дистанционной передачи угловых перемещений | 1976 |
|
SU728150A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
