(54) ЭЛАСТИЧНЫЙ СИЛОВОЙ МЕХАНИЗМ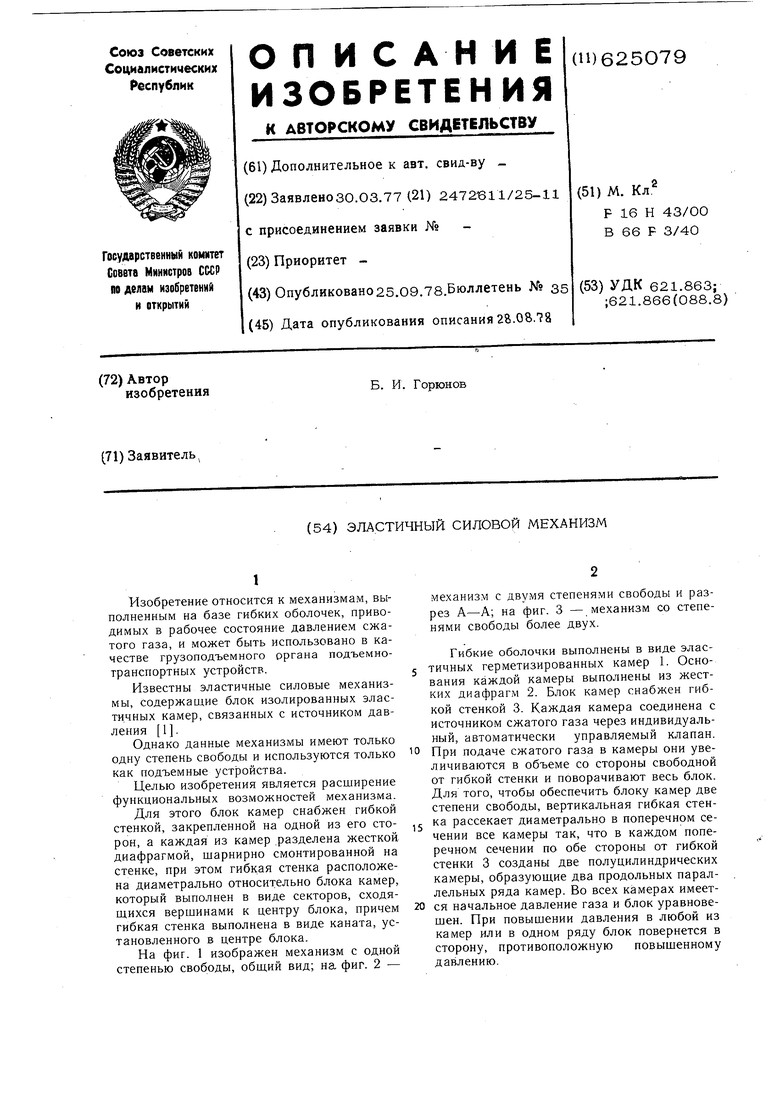
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2000 |
|
RU2185695C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2002 |
|
RU2233787C2 |
| ПЕРФУЗИОННЫЙ НАСОС ПУЛЬСИРУЮЩЕГО ДЕЙСТВИЯ | 2000 |
|
RU2183289C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2002 |
|
RU2233788C2 |
| ДВУХОСЕВОЙ РОТОРНО-КАМЕРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ДоРК ДВС) | 2010 |
|
RU2451801C2 |
| ДВИГАТЕЛЬ СТИРЛИНГА С ГЕРМЕТИЧНЫМИ КАМЕРАМИ | 2002 |
|
RU2224129C2 |
| МАШИНА С ВРАЩАЮЩИМСЯ ПОРШНЕМ | 2002 |
|
RU2293847C2 |
| ЦИЛИНДРИЧЕСКИЙ АППАРАТ, ОБЕСПЕЧИВАЮЩИЙ ЛЕВИТАЦИЮ НА ВОЗДУШНОЙ ПОДУШКЕ, И СПОСОБ НАПРАВЛЯЕМОЙ ПОДАЧИ БЕСКОНЕЧНОЙ ГИБКОЙ ЛЕНТЫ НА ВХОД ЛЕНТОЧНОЙ МАШИНЫ НЕПРЕРЫВНОГО ЛИТЬЯ | 2000 |
|
RU2225277C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2002 |
|
RU2233786C2 |

I
Изобретение относится к механизмам, выполненным на базе гибких оболочек, приводимых в рабочее состояние давлением сжатого газа, и может быть использовано в качестве грузоподъемного органа подъемнотранспортных устройств.
Известны эластичные силовые механизмы, содержащие блок изолированных эластичных камер, связанных с источником давления 1.
Однако данные механизмы имеют только одну степень свободы и используются только как подъемные устройства.
Целью изобретения является расширение функциональных возможностей механизма.
Для этого блок камер снабжен гибкой стенкой, закрепленной на одной из его сторон, а каждая из камер .разделена жесткой диафрагмой, шарнирно смонтированной на стенке, при этом гибкая стенка расположена диаметрально относительно блока камер, который выполнен в виде секторов, сходяпдихся вершинами к центру блока, причем гибкая стенка выполнена в виде каната, установленного в центре блока.
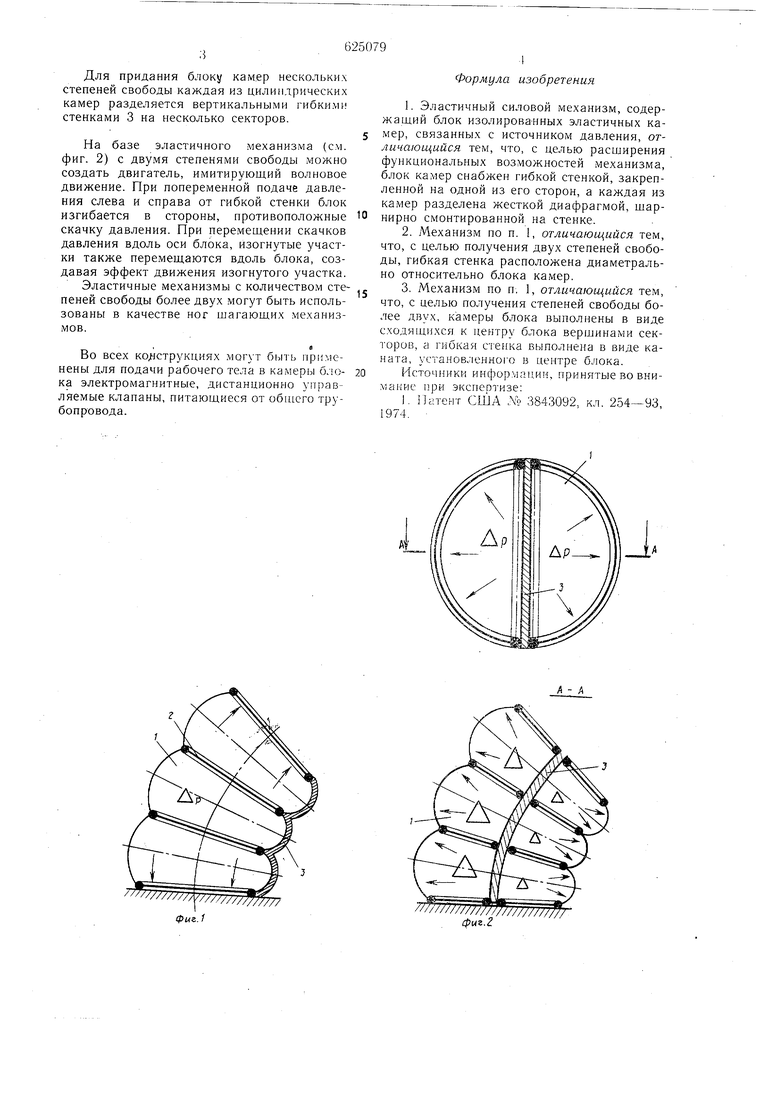
На фиг. 1 изображен механизм с одной степенью свободы, общий вид; на фиг. 2 -
механизм с двумя степенями свободы и разрез А-А; на фиг. 3 - механизм со степенями свободы более двух.
Гибкие оболочки выполнены в виде эластичных герметизированных камер 1. Основания каждой камеры выполнены из жестких диафрагм 2. Блок камер снабжен гибкой стенкой 3. Каждая камера соединена с источником сжатого газа через индивидуальный, автоматически управляемый клапан.
При подаче сжатого газа в камеры они увеличиваются в объеме со стороны свободной от гибкой стенки и поворачивают весь блок. Для того, чтобы обеспечить блоку камер две степени свободы, вертикальная гибкая стенка рассекает диаметрально в поперечном сечении все камеры так, что в каждом поперечном сечении по обе стороны от гибкой стенки 3 созданы две полуцилиндрических камеры, образующие два продольных параллельных ряда камер. Во всех камерах имеется начальное давление газа и блок уравновешен. При повышении давления в любой из камер или в одном ряду блок повернется в сторону, противоположную повышенному давлению.
Для придания блоку камер нескольких степеней свободы каждая из цилиндрических камер разделяется вертикальными гибкими стенками 3 на несколько секторов.
На базе эластичного механизма (см. фиг. 2) с двумя степенями свободы можно создать двигатель, имитирующий волновое движение. При попеременной подаче давления слева и справа от гибкой стенки блок изгибается в стороны, противоположные скачку давления. При перемещении скачков давления вдоль оси блока, изогнутые участки также перемещаются вдоль блока, создавая эффект движения изогнутого участка.
Эластичные механизмы с количеством степеней свободы более двух могут быть использованы в качестве ног шагающих механизмов.
и
Во всех кo cтpyкцияx быть применены для подачи рабочего тела в камеры блока электромагнитные, дистанционно управляемые клапаны, питающиеся от общего трубопровода.
Формула изобретения
Источники информации, принятые во внимание при экспертизе:
I. Патент США Лч 3843092. кл. 254-93, 1974.
фие. 1
Л /////////77///////////// /
фиг.г
фиг. 3
