Изобретение относится к техническим средствам сбора и передачи первичной экономической информации для целей оперативного управления резяно-технинеским производством и может быть шяользовано дня вышеуказанных оелеб в машиностроении, строительстве, текстильной промышленности и других отраслях, где контролируемый объект (о рудование) взаимодействует с непрерывным материальным потоком {ши выпускает длинномерные изделия (металлические, полимерные, текстильные и др.).
Известны устройства для контроля работы оборудования, где измерительное ко- лесо (или ролик) связано с измеряемым материалом в одной точке а с датчиком угла поворота (контактным, бесконтактным) ilНаиболее близким по технической сушности к данному изобретеншо является устройство для контроля и регистрации отклонения параметров, содержащее датчики скоростей, выходной датчик потока и нуль органы 2J..
Однако такое устройство не позволяет получить противоположное состояиве выход ного элемента Р, например, в ситуации работы эборудования при равенстве задающего н 4®ктическаго значений контролируеs bCK параметров и при простое, когда эти параметры равны. Кроме того, зона допустимого отклонения существенно зависит от гистерезиса выходного реле Р (для про межуточных реле гистерезис составляет О,3-О,6 от величины срабатывания). Это свойство не позволяет использовать это устройство в том случае, когда допустимое отклонение контролируемых параметров меньше величины гистерезиса, ; Целью изобретения является повышение точности устройства.
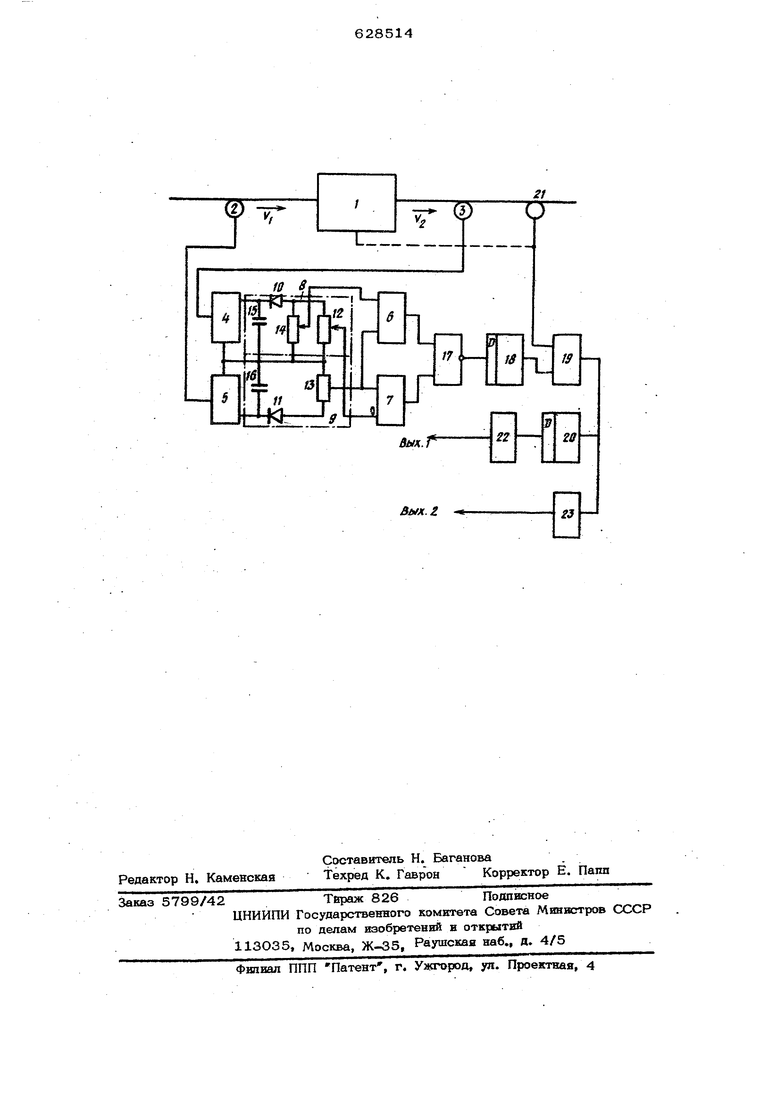
Это достигается тем, что в предлагаемое устройство введены генераторы, фильтры, элементы ИЛИ-НЕ, задержки, И и усилители, датчики скоростей через соответствующие генераторы и фильтры подключены ко входам нуль-органов, выходы которых соединены со входами элемента ИЛИ-НЕ, выход которого через первый элемент задержки подключен к одному из входов элемента И, другой вход которого соединен с выходным датчиком, а выход элемента И подключен через второй элемент задерж ки и непосредственно к первому и второму усилителям соответственно. На чертеже показана блок-схема устройства, где изображены объект контроля 1, датчики скоростей 2 и 3, генераторы 4 и 5, нуль-органы 6,7, фильтры 8 и 9, состо5пцие из диодов 10, 11, резисторов 12, 13, 14 и конденсаторов 15, 16, эле мент ИЛИ-НЕ 17, первый элемент задержки 18, элемент И 19, второй элемент задержки .20, выходной дачик 21 и усилители 22 и 23 Устройство работает следующим обра.зом. Материальный поток, двигаясь в продольном направлении, взаимодействует с датчиками скоростей 2, 3 и датчиком дли ны noToka 21. Генераторы 4, 5 генерируют напряжения, пропорциональные скоростям YitVrt, которые подаются через конденсаторы 15 16 фильтров 8, 9 и диоды 10 и 11 на резисторы 13, 14 и 15 задания зоны допустимого откло1нения скоростей, которая определяется экспериментально Ю1И анали- гачески для данного материала, исходя из до пустимых пределов еговытяжки или усадки. Сигналы с резисторов 12, 14 и 14, 13 подаются в противофазе на входы нуль органов 6, 7 так, что при фактическом равенстве скоростей Yj и V установленная разница сигналов пропорциональна допустимому отклонению этих скоростей. При этом «уль-органы 6, 7 находятся в нулевом состоянии, а на выходе элемента И-НЕ 17 существует единичный сигнал. Этот сигнал подается на элемент задержки 18, необходимый для отстройки от кра ковременных случайных совпадений скорос тей при фактическом простое оборудования Сигнал с выхода элемента 18 подается на элемент И 19 с импульсами выходного датчика 21 или с сигналом скорости рабо ты оборудования, полученным от функциональных элементов управления оборудованием, показанных на чертеже пунктирной линией. С выхода элемента И 19 импульс учета единицы длины поступает параллель но на второй усилитель канала учета единицы длины и на второй элемент задержки 2О, соединенный с выходным элементом канала работы оборудования. В этом случае по первому выходному каналу выдается сигнал о работе оборудования, а по второму выходному каналу - импульс учета единицы длины материала. 62 44 При появлении фактического отклонения скоростей определенного знака на одном из элементов, например, на нуль-орг(ане 6, разница сигналов увеличивается, удерживая его в третьем состоянии, а на другом, например на нуль-органе 7 - уменьшается. Если фактическое отклонение достигнет допустимого значения, то разница сигналов на нуль-органе 7 будет равна нулю, что соответствеут отсутствию фазы между сравниваемыми сигналами одной полярности с разных генераторов, В этом случае с учетом нечувствительности нуль-орган 7 перейдет в противоположное (исходное) состояние, и на выходе его появится единичный сигнал, который инвертируется элементом 17. Все последующие элементы 18-23 находятся в исходном состоящий. Коэффициентами передачи резисторов 12, 13, 14 можно задавать как симметричную, так и асимметричную зоны допустимого отклонения скоростей. В случае отсутствия входных сигналов, т, е. при Y 2 О, фаза между входными сигналами также отсутствует, что удерживает фазочувствительныё элементы в исходном состоянии. На их выходах также появляются едшичные сигналы, которые инвертируются элементом ИЛИ-НЕ 17. А последующ ю элементы схемы устройства в этом случае находятся в исходном состоянии и сигналы выхода с элементов 22 и 23 отсутствуют. Формула изобретения Устройство для контроля и регистрации работы оборудования, содержащее датчики скоростей, выходной датчик и нуль-органы, отличающееся тем, что, с целью повышения точности устройства, в него введены генераторы, фильтра, элементы ИЛИ-НЕ, задержки, И и усилители, датчики скоростей через соответствующие генераторы и фильтры подключены ко входам нуль-органов, выходы которых соединены со входами элемента ИЛИ-НЕ, выход которого через первый. элемент задержки подключен к одному из входов элемента И, другой вход которого соединен с выходным датчиком, а выход элемента И подключен через второй элемент задержки и непосредственно к первому и второму усилителям соответственно. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство № 37982, кл.Р 21 q 7/ОО, 1933, 2.Литвак В. Иг Автоматическая аварийная защита в системах управления, М., Энергия, 1973, с. 25-27.
I
Вых. Z 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления нагрузкой горной машины и устройство для его осуществления | 1989 |
|
SU1707199A1 |
| Устройство точной синхронизации | 1987 |
|
SU1561145A1 |
| Система для программного управления | 1989 |
|
SU1675847A1 |
| Автоматическое устройство управления бурового станка | 1980 |
|
SU909139A2 |
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ЗАЩИТОЙ | 1998 |
|
RU2137282C1 |
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ЗАЩИТОЙ | 1991 |
|
RU2024171C1 |
| СТАБИЛИЗИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОСТОЯННОГО НАПРЯЖЕНИЯ С ЗАЩИТОЙ | 1999 |
|
RU2156023C1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Цифровой фильтр | 1984 |
|
SU1262690A1 |
| Устройство контроля скорости ленты конвейера | 1989 |
|
SU1752687A1 |