v (п Z(P) ц. I . W(p) шПодставив най, lw 1 + W(p) p 1 + W(p) l ловие (11), получим
Подставив найд
Подставив най, е (11), получим
Подставив найденные параметры в ус

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Способ управления горной машиной и устройство для его осуществления | 1983 |
|
SU1105640A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815785A1 |
| Автоматический корректор частоты для дизель-генераторных электростанций | 1983 |
|
SU1176437A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ С ВЫРАВНИВАНИЕМ НАГРУЗОК ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ГЕНЕРАТОРОВ | 2007 |
|
RU2345461C1 |
| Реверсивный релейный электропривод | 1976 |
|
SU661703A1 |
| Устройство для регулирования напряжения с выравниванием нагрузок параллельно работающих генераторов | 1986 |
|
SU1365242A1 |
| СПОСОБ УПРАВЛЕНИЯ ИСТОЧНИКОМ ТОКА В ИМИТАТОРЕ СОЛНЕЧНОЙ БАТАРЕИ | 2020 |
|
RU2742379C1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
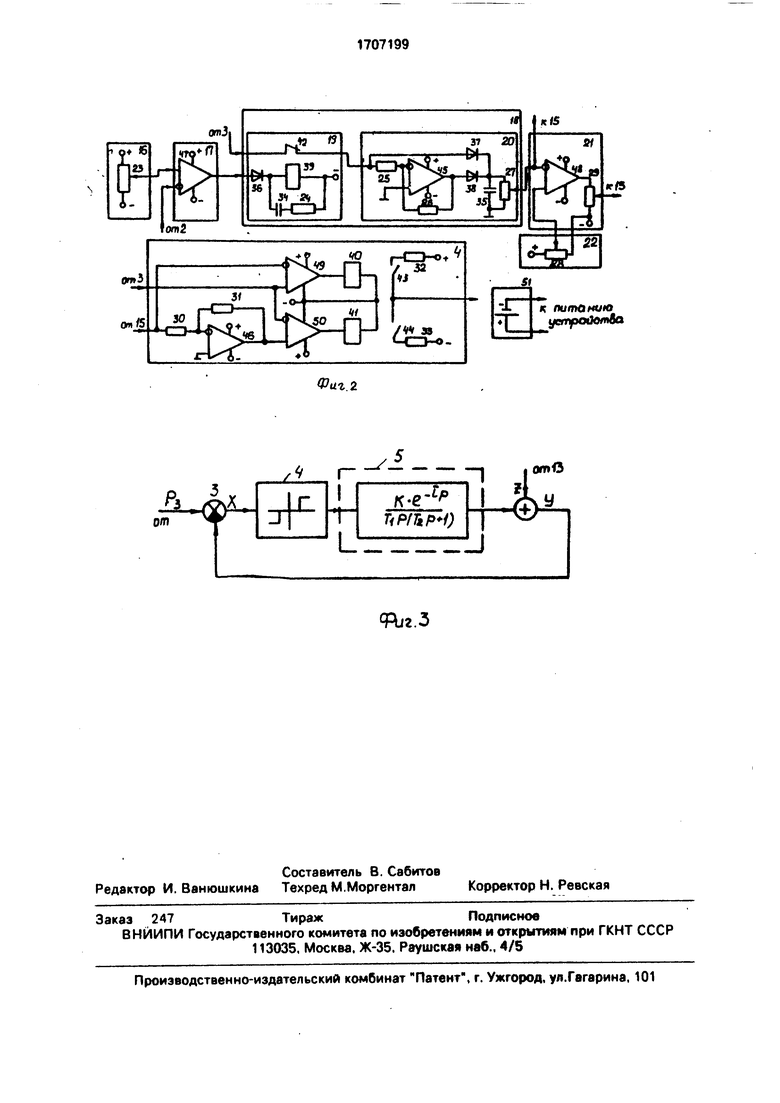
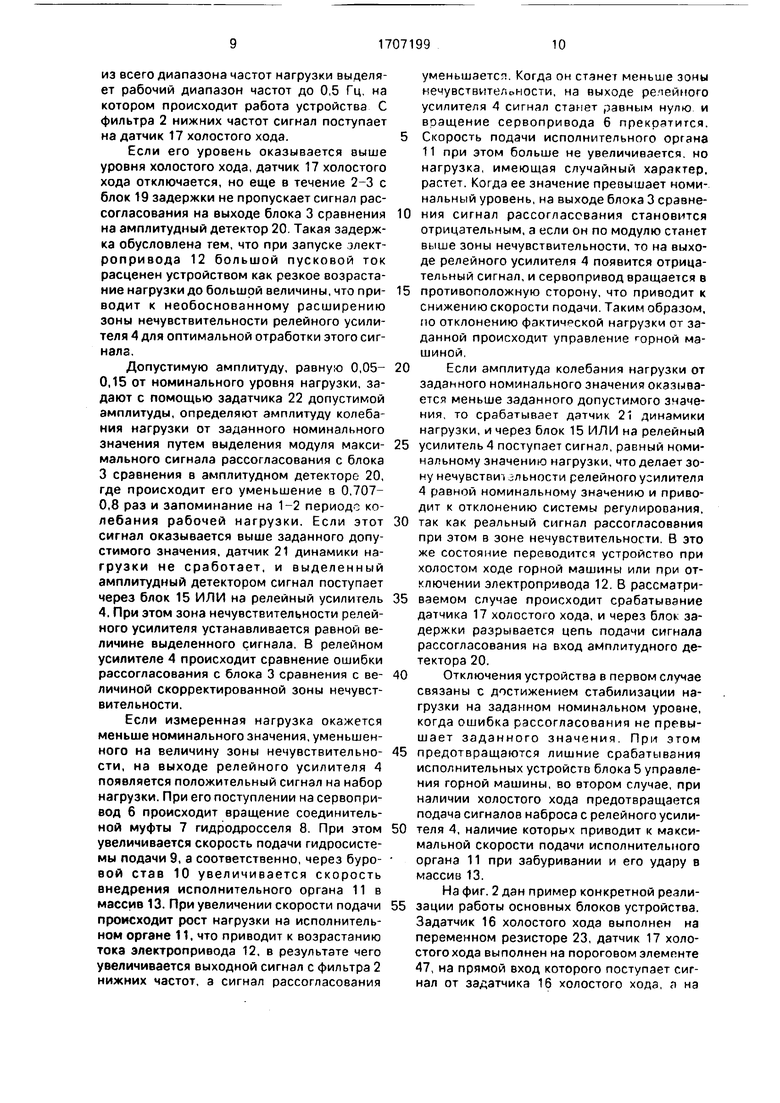
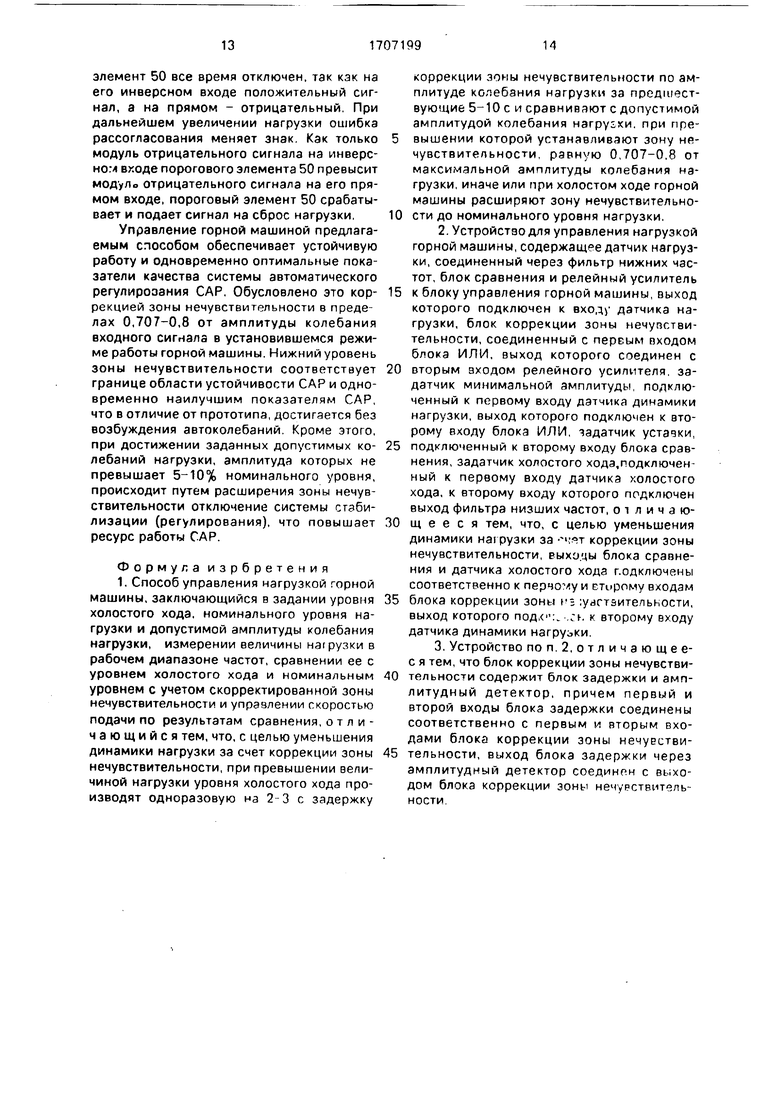
Изобретение относится к горной промышленности, а именно к автоматизации управления нагрузкой горной машины, и позволяет снизить динамику нагрузки за счет коррекции зоны нечувствительности. За датчики 14, 16 и 22 задают номинальный уровень нагрузки, уровень холостого хода и величину допустимой амплитуды колебания нагрузки (АКН). Датчик 1 нагрузки и фильтр 2 нижних частот обеспечивают измерение нагрузки в рабочем диапазоне частот. Блок 3 сравнения и релейный усилитель 4 обеспечивают управление скоростью подачи в зависимости от рассогласования измеренной и заданной номинальной величинами нагрузки с учетом зоны нечувствительности. Датчик 17 холостого хода и блок 19 задержки обеспечивают задержку сигнала рассогласования при запуске электропривода 12. Блок 18 коррекции зоны нечувствительности, датчик 21 динамики нагрузки и блок 15 ИЛИ обеспечивают задание величины зоны нечувствительности. При превышении АКН заданной допустимой величины задается зона нечувствительности в пределах 0,707-0,8 от максимальной АКН. В противном случае и при холостом ходе зона нечувствительности задается в размере номинального уровня нагрузки. 2 с. и 1 з.п.ф- лы, 3 ил. .3 Ё
Подставив значения передаточной функции (1) в формулу (4), находим для установившегося процесса
-(jw)
ZQw) 1.+W(jw)
Рз.
(5)
Как следует из выражения (5), выходная координата в установившемся процессе складывается из двух составляющих: из постоянной составляющей, соответствующей заданной номинальной нагрузке, и из переменной составляющей, определяемой параметрами входного сигнала и параметрами устройства регулирования.
Для того, чтобы происходила стабилизация нагрузки, а не ее раскачка, необходимо выполнение следующего условия:
1
1 + W (jw)
(6)
Подставив в (6) параметры передаточной функции, получаем следующее условие стабилизации:
q-K-2TiW (WT2 -coswr + ) 0. (7)
Из условия (7) следует, что чем больше коэффициент гармонической линеаризации, тем выше качество системы регулирования, но бесконечно увеличивать его нельзя. Верхний предел накладывает условие устойчивости:
1 + W GW) 0.
(8)
jTiW(1 + T2Jw)
(9)
После подставки в (8) значения передаточной функции, получим:
-jw
Приравнивая нулю действительные и мнимые части выражения (9), получим условия:
4СК
я А4
V
2В2-АМ-(Тг
2/
(Ti -cos шт4Sr
-Kqr-2WTrT2 sinwr)0.(12)
Учитывая, что при автоколебаниях должны быть выполнены условия (10), получим из (12):
4СК 2В2-А2
JTA
я
- W2 Ti2 Т2 ) 0.
(-K2q2r(13)
Откуда следует, что для срыва автоколе- 30 баний должно быть выполнено условие:
2
А В А
(14)
5
0
5
0
5
В
V ак как точное значение параметра успри выполнении которого условие существования автоколебаний (13) никогда не будет реализовано, а потому автоколебания становятся невозможными. Из формулы (2) следует, что чем меньше В, тем больше q, поэтому оптимальной величиной является
JL- -А 0,707 А.
$
тановить невозможно, в данном способе сделан плюсовой допуск. Верхний предел допуска проверен путем математического моделирования на ЦВМ. Отклонение параметра В в пределах 0.707 В 0,8 А не снижает практически качество системы стабилизации.
Устройство реализует способ управления нагрузкой горной машины следующим образом. Задают уровень нагрузки холостого хода с помощью задатчика 16 холостого хода, а номинальный уровень нагрузки задается с помощью задатчика 14 уставки. Измерение нагрузки в рабочем диапазоне частот производят с помощью датчика 1 нагрузки и фильтра 2 нижних частот, который
из всего диапазона частот нагрузки выделяет рабочий диапазон частот до 0,5 Гц, на котором происходит работа устройства С фильтра 2 нижних частот сигнал поступает на датчик 17 холостого хода.
Если его уровень оказывается выше уровня холостого хода, датчик 17 холостого хода отключается, но еще в течение 2-3 с блок 19 задержки не пропускает сигнал рассогласования на выходе блока 3 сравнения на амплитудный детектор 20. Такая задержка обусловлена тем, что при запуске электропривода 12 большой пусковой ток расценен устройством как резкое возрастание нагрузки до большой величины, что приводит к необоснованному расширению зоны нечувствительности релейного усилителя 4 для оптимальной отработки этого сиг- нала.
Допустимую амплитуду, равную 0,05- 0,15 от номинального уровня нагрузки, задают с помощью задатчика 22 допустимой амплитуды, определяют амплитуду колебания нагрузки от заданного номинального значения путем выделения модуля максимального сигнала рассогласования с блока 3 сравнения в амплитудном детекторе 20, где происходит его уменьшение в 0,707- 0,8 раз и запоминание на 1-2 периоде колебания рабочей нагрузки. Если этот сигнал оказывается выше заданного допустимого значения, датчик 21 динамики нагрузки не сработает, и выделенный амплитудный детектором сигнал поступает через блок 15 ИЛИ на релейный усилитель 4. При этом зона нечувствительности релейного усилителя устанавливается равной величине выделенного сигнала. В релейном усилителе 4 происходит сравнение ошибки рассогласования с блока 3 сравнения с величиной скорректированной зоны нечувствительности.
Если измеренная нагрузка окажется меньше номинального значения, уменьшенного на величину зоны нечувствительности, на выходе релейного усилителя 4 появляется положительный сигнал на набор нагрузки. При его поступлении на сервопривод 6 происходит вращение соединительной муфты 7 гидродросселя 8. При этом увеличивается скорость подачи гидросистемы подачи 9, а соответственно, через буровой став 10 увеличивается скорость внедрения исполнительного органа 11 в массив 13. При увеличении скорости подачи происходит рост нагрузки на исполнительном органе 11, что приводит к возрастанию тока электропривода 12, в результате чего увеличивается выходной сигнал с фильтра 2 нижних частот, а сигнал рассогласования
уменьшается. Когда он станет меньше зоны нечувствителоности, на выходе релейного усилителя 4 сигнал станет равным нулю и вращение сервопривода 6 прекратится.
Скорость подачи исполнительного органа 11 при этом больше не увеличивается, но нагрузка, имеющая случайный характер, растет. Когда ее значение превышает номинальный уровень, на выходе блока 3 сравне0 ния сигнал рассогласования становится отрицательным, а если он по модулю станет выше зоны нечувствительности, то на выходе релейного усилителя 4 появится отрицательный сигнал, и сервопривод вращается в
5 противоположную сторону, что приводит к снижению скорости подачи. Таким образом, по отклонению фактической нагрузки от заданной происходит управление горной машиной.
0Если амплитуда колебания нагрузки от заданного номинального значения оказывается меньше заданного допустимого значения, то срабатывает датчик 2 динамики нагрузки, и через блок 15 ИЛИ на релейный
5 усилитель 4 поступает сигнал, равный номинальному значению нагрузки, что делает зону нечувствительности релейного усилителя 4 равной номинальному значению и приводит к отклонению системы регулирования,
0 так как реальный сигнал рассогласования при этом в зоне нечувствительности. В это же состояние переводится устройство при холостом ходе горной машины или при отключении электропривода 12. В рассматри5 ваемом случае происходит срабатывание датчика 17 холостого хода, и через блок задержки разрывается цепь подачи сигнала рассогласования на вход амплитудного детектора 20.
0 Отключения устройства в первом случае связаны с достижением стабилизации нагрузки на заданном номинальном уровне, когда ошибка рассогласования не превышает заданного значения. При этом
5 предотвращаются лишние срабатывания исполнительных устройств блока 5 управления горной машины, во втором случае, при наличии холостого хода предотвращается подача сигналов наброса с релейного усили0 теля 4, наличие которых приводит к максимальной скорости подачи исполнительного органа 11 при забуривании и его удару в массив 13.
На фиг. 2 дан пример конкретной резли5 зации работы основных блоков устройства. Задатчик 16 холостого хода выполнен на переменном резисторе 23, датчик 17 холостого хода выполнен на пороговом элементе 47, на прямой вход которого поступает сигнал от зэдатчика 16 холостого хода, а на
инверсный вход поступает рабочий сигнал нагрузки с фильтра 2 нижних частот. Такая схема подключения обеспечивает включение порогового элемента 47, пока сигнал с фильтра 2 ниже сигнала с эадатчика 16 холостого хода, иначе происходит его отключение. Выход датчика 16 холостого хода соединен с входом звена задержки, представляющим собой реле 39 с элементами задержки реле 39 на отпускание.
Блок 19 задержки работает следующим образом. При включенном пороговом элементе 47 диод 36 поступает сигнал на реле 39. Реле срабатывает и своим контактом 42 разрывает цепь от блока 3 сравнения к амплитудному детектору 20. Емкость 34 через резистор 24 заряжается до напряжения питания реле 39. После того, как пороговый элемент 47 отпускают, реле 39 находится во включенном состоянии в течение 2-3 с. В течение этого времени емкость 34 разряжается через резистор 34 и реле 39, поддерживая величину тока, превышающую величину тока отпускания. После отпускания реле 39, замыкается контакт 42, и сигнал рассогласования блока 3 сравнения поступает на вход амплитудного детектора 20. Положительный сигнал рассогласования поступает через диод 37 на емкость 35, а отрицательный сигнал рассогласования проходит через инвертор, собранный на усилителе 45 и одинаковых резигторах 25 и 26. При этом он становится положительным и через диод 38 поступает на емкость 35. Таким образом, на емкости выделяется модуль амплитудного значения сигнала рассогласования, и это значение запоминается на 1-2 периода колебания ошибки рассогласования. Низшая рабочая частота нагрузки имеет порядок 0,2 Гц, поэтому 1-2 периода ее колебания произойдут за 5-10 с. Для того, чтобы в течение этого времени на емкости 35 сигнал существенно (не более 15%) не изменился, постоянная разряда емкости, определяемая по формуле Т R -С должна равняться 30-60 с, где R - сопротивления резистора 27, С - величина емкости 35.
Если выбрать емкость 200 мкФ, то максимальное сопротивление резистора 27 составит 300 кОм. °езистор 27 является потенциометрическим, что обеспечивает выделения на нем необходимой величины зоны нечувствительности релейного усилителя 4. Для этого коэффициент передачи (отношение выходного сигнала к входному) устанавливается равным 0,707-0,8 согласно способу управления. Датчик 21 динамики нагрузки реализован на пороговом элементе 48, инверсный вход которого подключен к выходу блока 18 коррекции зоны нечувствительности, а прямой его вход связан с задатчиком 22 минимальной амплитуды, выполненном на потенциометрическом
резисторе 28. Пока сигнал на инверсном входе ниже, чем на прямом, пороговый элемент через потенциометрический резистор 29 посылает сигнал, величина которого равна номинальному значению нагрузки, через
0 блок 15 ИЛИ на релейный усилитель 4. Коэффициент передачи потен циометрическо- го резистора 28 выбирается в пределах (0,05-0,15) 0,707 0,035 - 0,106, что обеспечивает при превышении ошибки рассогла5 сования величины, равной 0,05-0.15 от номинального уровня нагрузки отключение датчика 21 динамики нагрузки. Коэффициент 0,707 - минимальный коэффициент передачи потенциометрического резистора 27
0 амплитудного детектора 20.
Релейный усилитель 4 реализован на двух пороговых элементах 49 и 50, установленных в каналах наброса и сброса нагрузки соответственно. На выходе пороговых
5 элементов 49 и 50 установлены реле 40 и 41, которые связывают своими контактами 43 и 44 соответственно выход релейного усилителя 4 с положительным и отрицательным потенциалом источника питания
0 51. Резисторы 32 и 33 предназначены для защиты источника питания 51 от короткого замыкания при одновременном срабатывании реле 40 и 41, что может быть при нулевой зоне нечувствительности релейного
5 усилителя 4.
Сигнал от блока 15 ИЛИ задает зону нечувствительности следующим образом. Он подключается к инверсному входу порогового усилителя 49 и через инвертор, реа0 лизованный на усилителе 50 с двумя одинаковыми резисторами 30 и 31. подключается на прямой вход порогового элемента 50. Такая схема подключения обеспечивает срабатывание каналов сбро5 са и наброса нагрузки лишь тогда, когда ошибка рассогласования по модулю превышает зону нечувствительности. Если ошибка рассогласования положительная (нагрузка не достигла номинального значе0 ния), пороговый элемент 49 включается положительным сигналом от блока 3, срабатывает реле 40, и положительный сигнал на наброс нагрузки посылается через резистор 32 и контакт 43 к блоку 5 управле5 ния горной машины. По мере увеличения нагрузки ошибка рассогласования уменьшается и, как только она достигает величины, равной величине сигнала от блока 15 ИЛИ, пороговый элемент 49 отключается и наброс прекращается. При этом пороговый
элемент 50 все время отключен, так кэк на его инверсном входе положительный сигнал, а на прямом - отрицательный. При дальнейшем увеличении нагрузки ошибка рассогласования меняет знак. Как только модуль отрицательного сигнала на инверсном входе порогового элемента 50 превысит модуле отрицательного сигнала на его прямом входе, пороговый элемент 50 срабатывает и подает сигнал на сброс нагрузки,
Управление горной машиной предлагаемым способом обеспечивает устойчивую работу и одновременно оптимальные показатели качества системы автоматического регулирооания САР. Обусловлено это коррекцией зоны нечувствительности в пределах 0,707-0,8 от амплитуды колебания входного сигнала в установившемся режиме работы горной машины. Нижний уровень зоны нечувствительности соответствует границе области устойчивости САР и одновременно наилучшим показателям САР, что в отличие от прототипа, достигается без возбуждения автоколебаний. Кроме этого, при достижении заданных допустимых колебаний нагрузки, амплитуда которых не превышает 5-10% номинального уровня, происходит путем расширения зоны нечувствительности отключение системы стабилизации (регулирования), что повышает ресурс работы САР.
Формула изрбретения 1. Способ управления нагрузкой горной машины, заключающийся в задании уровня холостого хода, номинального уровня нагрузки и допустимой амплитуды колебания нагрузки, измерении величины нагрузки в рабочем диапазоне частот, сравнении ее с уровнем холостого хода и номинальным уровнем с учетом скорректированной зоны нечувствительности и управлении скоростью подачи по результатам сравнения, отличающийся тем, что, с целью уменьшения динамики нагрузки за счет коррекции зоны нечувствительности, при превышении величиной нагрузки уровня холостого хода производят одноразовую на 2-3 с задержку
коррекции зоны нечувствительности по амплитуде колебания нагрузки за предшествующие 5-10 с и сравнивают с допустимой амплитудой колебания нагруьхи. при превышении которой устанавливают зону нечувствительности, равную 0,707-0.8 от максимальной амплитуды колебания нагрузки, иначе или при холостом ходе горной машины расширяют зону нечувствительности до номинального уровня нагрузки,
к блоку управления горной машины,выход которого подключен к вход датчика нагрузки, блок коррекции зоны нечувствительности, соединенный с первым входом блока ИЛИ, выход которого соединен с
вторым зходом релейного усилителя, за- датчик минимальной амплитуды, подключенный к первому входу датчика динамики нагрузки, выход которого подключен к второму входу блока ИЛИ, яадатчик устаэки,
подключенный к второму входу блока сравнения, задатчик холостого ходэ,подключен- ный к первому входу датчика холостого хода, к второму входу которого подключен выход фильтра низших частот, отличающ е е с я тем, что, с целью уменьшения динамики нагрузки за - «;чт коррекции зоны нечувствительности, выходы блока сравнения и датчика холостого хода подключены соответственно к перчому и второму входам
блока коррекции зоны гз :улгтзительности, выход которого . ,:к к второму входу датчика динамики нагруоки.
xl
Р v
J3L 5 Lо/п у
г
к питанию 7Г уагройолЛа
отО
ФЬг.З
| Регулятор нагрузки ПРИЗ для проходческих комбайнов и буровых машин | |||
| Руководство по эксплуатации ПРИЗ ОО.ООО.РЭ | |||
| Донецк, 1980 | |||
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
