Изобретение относится к автоматизации конвейерного транспорта и может быть использовано для технической диагностики транспортирующих машин непрерывного действия, предназначенных преимущественно для перемещения сыпучих материалов в различных областях производства.
Цель изобретения - повышение надежности контроля.
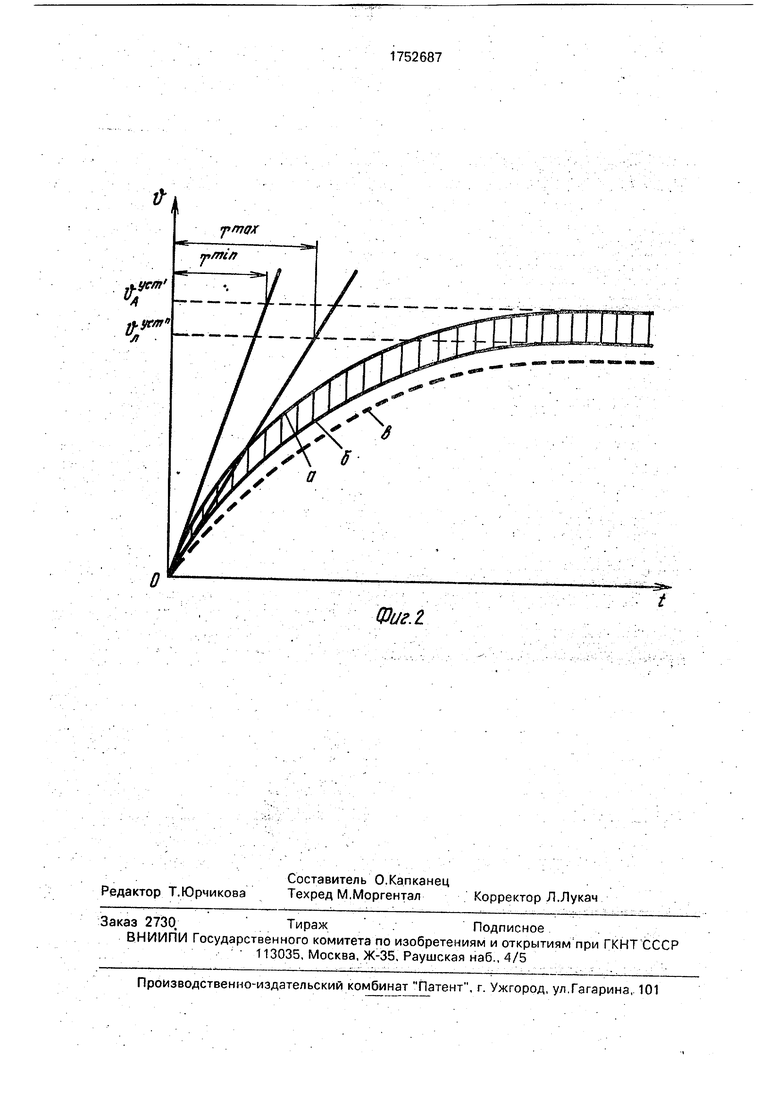
На фиг. 1 представлена блок-схема устройства контроля скорости ленты конвейера; на фиг. 2 показаны графики переходных процессов при различных режимах эксплуатации конвейера.
Устройство контроля скорости ленты конвейера содержит индуктивный датчик 1, взаимодействующий с грузонесущим элементом 2, генератор 3 аналоговых сигналов, генератор 4 дискретных импульсов, элемент НЕ 5, интегратор 6, источник 7 стабилизированного опорного сигнала, блок 8 памяти, элемент 9 задержки сигнала, блоки 10 и 11 деления, задатчики 12 и 13, блоки 14,15,16 и 17 масштабирования, фильтры 18,19 и 20 нижних частот, компаратор 21, измерительные блоки 22 и 23, блоки 24 и 25 суммирования, блок 26 дифференцирования, коммутирующий блок 27, формирователь 28 заданного допустимого уровня скорости ленты в пусковом режиме конвейера, ключи 20,39,31 и 32, нуль-орган 33, триггер 34, датчик 35 активной мощности, потребляемой электродвигателем конвейера, и датчик 36 плотности сыпучего материала, транспортируемого конвейером.
Вход запуска интегратора 6 соединен с выходом генератора 3 дискретных импульсов и входом логического элемента НЕ 5, выход которого соединен с входами остановки интегратора 6, элемента 9 задержки сигнала и запуска блока 8 памяти. Выход элемента 9 задержки сигнала соединен с входом сброс.а интегратора 6. Первый за- датчик 12 соединен с входом делимого первого блока 11 деления. Выход первого фильтра 18 нижних частот соединен с первым измерительным блоком 22 и первым входом компаратора 21. Вход запуска формирователя 28 заданного уровня скорости
соединен с выходом коммутирующего блока 27 и входом сброса триггера 34, измерительный вход - с выходом источника 6 опорного сигнала, а выход через последовательно соединенные четвертый блок 15 масштабирования и третий ключ 30 - с вторым входом компаратора 21. Выход первого фильтра 18 нижних частот соединен с первым входом второго блока 24 суммирования и входом
блока 26 дифференцирования, выход которого через последовательно включенные второй ключ 29 и нуль-орган 33 соединен с управляющими входами третьего 30 и первого 31 ключей и входом установки триггера
34, Выход триггера 34 соединен с управляющими входами второго 29 и четвертого 32 ключей, Выход компаратора 21 через четвертый ключ 32 соединен с входом коммутирующего блока 27. Датчик 35 активной
мощности подключен к первому входу первого блока 25 суммирования, к второму входу которого подключен задатчик 13 активной мощности, Датчик 36 плотности транспортируемого материала соединен с
входом делителя второго блока 10 деления, вход делимого которого соединен с выходом первого блока 25 суммирования. Выход блока 10 деления через последовательно включенные второй блок 16 масштабирования и третий фильтр 20 нижних частот соединен с вторым входом второго блока 24 суммирования, выход которого соединен с вторым измерительным блоком 23 и через третий блок 17 масштабирования, третий
фильтр 19 нижних частот и первый ключ 31 с вторым входом компаратора 21,
Устройство работает следующим образом.
При включении в работу конвейера начинается движение ленты и в результате взаимодействия с грузонесущим элементом датчик 1 генерирует сигнал, амплитуда которого пропорциональна, а период колебаний обратно пропорционален скорости движения ленты. Этот сигнал подается на генера тор 3 аналоговых сигналов, которым он усиливается, и поступает на вход генерато ра 4 дискретных импульсов, преобразующе го непрерывный сигнал на входе .
прямоугольные импульсы на выходе. С выхода генератора 4 дискретных импульсов сигнал поступает на элемент НЕБ, что приводит к исчезновению сигнала на его выходе, и на запускающий вход интегратора 6, на измерительный вход которого поступает стабилизированный сигнал от источника 7 опорного сигнала. При появлении сигнала на выходе генератора 4 дискретных импульсов интегратор включается в работу и фор- мирует на своем выходе линейно нарастающий сигнал. При исчезновении сигнала на выходе генератора дискретных импульсов появляется сигнал на выходе элемента НЕ 5, который подается на выклю- чающий вход интегратора, что приводит к прекращению операции интегрирования, и на запускающий вход блока 8 памяти. Величина сигнала на выходе интегратора в момент его выключения обратно пропорциональна скорости ленты на данном интервале времени взаимодействия с грузонесущим органом и является мерой времени их взаимодействия. При появлении сигнала на управляющем входе блока 8 па- мяти осуществляется операция запоминания сигнала, сформированного интегратором, Сигнал с выхода логического элемента НЕ подается также на вход элемента 9 задержки сигнала, на выходе кото- рого сигнал появляется с задержкой на время, необходимое для записи сигнала интегратора в блок памяти Выходной сигнал элемента 9 задержки сигнала обнуляет выход интегратора, подготавливая его к следу- ющему циклу обработки сигнала датчика, и блокирует вход блока памяти. Непрерывный сигнал с выхода блока 8 памяти подается на вход блока 11 деления, на второй вход которого от задатчика 12 подается по- стоянный сигнал, определяющий величину пути взаимодействия грузонесущего органа с датчиком 1, Блок 9 деления выполняет операцию деления сигнала задатчика 12 на сигнал блока 8 памяти, и формируемый им сигнал поступает на вход блока 14 масштабирования, выходной сигнал которого содержит информацию о текущей скорости VCp(t) ленты. Этот сигнал подается на вход компаратора 21, измерительный блок 22, вход блока 24 суммирования и вход блока 26 дифференцирования. В момент включения конвейера коммутирующий блок 27 формирует сигнал, разрешающий работу формирователя 28 заданного допустимого уровня скорости ленты в пусковом режиме, входным сигналом которого является сигнал источника 7 стабилизированного напряжения. Выходной сигнал формирователя 28, определяющий для каждого момента времени
минимальное расчетное значение скорости Vrnmp(t) в пусковом режиме, масштабируется блоком 15 масштабирования.
Поскольку в пусковом режиме скорость (t) ленты измеряется, это обеспечивает наличие сигнала на выходе блока 26 дифференцирования
Сигнал блока 26 дифференцирования через замкнутый ключ 29 поступает на нуль- орган 33, что приводит к появлению сигнала на его выходе, при этом замыкается ключ 30. что обеспечивает поступление сигнала блока 15 масштабирования на вход компаратора 21, и одновременно размыкается ключ 31. Указанное состояние ключей 30 и 31 сохраняется в течение всего пускового режима конвейера. Еспи в пусковом режиме обнаружится, что /ф(г.) Vmmp(t), т.е. что фактически скорость ленты меньше минимально допустимой, уровень которой определяется формирователем 28 экспоненты, то компаратор 21 через замкнутый ключ 32 подает сигнал на коммутирующий блок 27 и запуск конвейера будет прекращен. Если пусковой режим протекает нормально, то по достижении лентой установившейся скорости сигнал на выходе блока 26 дифференцирования становится нулевым и, значит выключается нуль-орган 33, задним фронтом исчезающего сигнала которого устанавливается триггер 34 и дается разрешение на запуск последующей машины транспортно-технологической системы Это приводит к размыканию ключей 29,30 и 32 и замыканию ключа 31
С пуском конвейера датчик 35 активной мощности формирует сигнал, пропорциональный потребляемой электродвигателем активной мощности, который поступает на вход блок 25 суммирования. На второй вход блока 25 суммирования от задатчика 13 активной мощности поступает постоянный сигнал, пропорциональный величине активной мощности, потребляемой электродвигателем ненагруженного конвейера после завершения пускового режима. Сигнал с выхода блока 25 суммирования U25(t) U3s(y) - -Ui3 подается на вход делимого блока 10 деления, на вход делителя которого поступает сигнал от датчика 36 плотности сыпучего материала, поступающего на ленточный конвейер и пропорциональный его текущей плотности. Сигнал блока 10 деления, пропорциональный величине отношения AWe(t)/p(t), поступает на входы блоков 16 и 17 масштабирования. Ёлок 16 масштабирования осуществляет операцию изменения в 1/qNg раз сигнала блока 10 деления, а блок 17масштабирования - операцию изменения сигнала блока 10 деления в 1/qNg «Vnpefl раз. Сигнал блока 17 масштабирования усредняется фильтром 19 нижних частот, выходной сигнал которого пропорционален текущей величине расчет- ного минимального допустимого значения скорости 0™|п (т) ленты конвейера, и в качестве предельно допустимого уровня снижения скорости подают на вход компаратора 21. Этфт сигнал определяет текущее значе- ние порога срабатывания указанного компаратора в зависимости от текущей производительности конвейера, при которой коэффициент заполнения грузонесуще- го элемента транспортируемым сыпучим материалом не превышает максимально допустимой величины пред .
Сигнал блока 16 масштабирования усредняется фильтром 20 нижних частот, выходной сигнал которого пропорционален текущей величине расчетного номинального уровня скорости 7р(т.) ленты, при которой коэффициент заполнения грузонесущего элемента транспортируемым материалом соответствует заданной величине, причем ipn № пред . Блоком 24 суммирования этот сигнал, пропорциональный текущей величине фактической скорости V(t) ленты, алгебраически суммируется с сигналом, формируемым фильтром 18 нижних частот. Величина сигнала блока 24 суммирования, характеризующая текущее значение сигнала рассогласования ± Д V(t) V(t) Vp(t), показывается измерительным блоком 23 и может быть использована для управления оператором или автоматической системой количеством подаваемого на конвейер сыпучего материала.
Формула изобретения Устройство контроля скорости ленты конвейера, содержащее датчик взаимодействия с грузонесущим органом, соединенный через последовательно включенные генератор аналоговых сигналов и генератор дискретных импульсов с первым входом ин- тегратора и через элемент НЕ с вторым входом интегратора, входом элемента задержки и первым входом блока памяти, к второму входу которого подключен выход интегратора, источник опорного сигнала, соединенный с третьим входом интегратора, с четвертым входом которого соединен выход элемента задержки, задатчик длины грузонесущего органа, подключенный к одному входу первого блока деления, к друго- му входу которого подключен выход
элемента памяти, при этом выход первого блока деления через первый блок масштабирования соединен с первым фильтром нижних частот, выход которого подключен к первому измерительному блоку и компаратору, второй измерительный блок и второй фильтр нижних частот, отличающееся тем, что, с целью повышения надежности контроля, оно снабжено датчиками активной мощности и плотности сыпучего материала, задатчиком активной мощности, двумя блоками суммирования, триггером, четырьмя ключами, вторым, третьим и четвертым блоками масштабирования, третьим фильтром нижних частот, коммутирующим блоком, формирователем заданного уровня скорости, блоком дифференцирования и нуль-органом, при этом датчик и задятчик активной мощности подключены к соответствующим входам первого блока суммирования, выход которого соединен с одним входом второго блока деления, с другим входом которого соединен датчик плотности сыпучего материала, выход второго блока деления подключен к входам второго и третьего блоков масштабирования, выход второго блока масштабирования через второй фильтр нижних частот подключен к одному входу второго блока суммирования, выход которого соединен с вторым измерительным блоком, выход третьего блока масштабирования через третий фильтр нижних частот подключен к одному входу первого ключа, выход первого фильтра нижних частот подключен также к другому входу второго блока суммирования и через блок дифференцирования к одному входу второго ключа, выход которого через нуль-орган соединен с одним входом третьего ключа, с другим входом первого ключа и с первым входом триггера, выход которого соединен с другим входом второго ключа и с одним входом четвертого ключа, к другому входу которого подключен выход компаратора, выход четвертого ключа соединен с комму- тирущим блоком, выход которого подключен к второму входу триггера и через последовательно соединенные формирователь заданного уровня скорости и четвертый блок масштабирования к другому входу третьего ключа, выходы первого и третьего ключей объединены и подключены к другому входу компаратора, выход источника опорного сигнала соединен также с соответствующим входом формирователя заданного уровня скорости
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля работоспособности ленточного конвейера | 1989 |
|
SU1759758A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Устройство контроля колебаний ленты вертикального ленточного конвейера | 1989 |
|
SU1676953A1 |
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
| Устройство контроля грузонесущей способности конвейера | 1989 |
|
SU1752688A1 |
| Устройство контроля смещения ленты конвейера | 1989 |
|
SU1616847A1 |
| Устройство контроля смещения ленты конвейера | 1990 |
|
SU1740282A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1988 |
|
SU1574513A1 |
| Устройство контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1680603A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1987 |
|
SU1479394A1 |
Изобретение относится к автоматизации конвейерного транспорта, предназначенного преимущественно для перемещения сыпучих материалов. Цель изобретения - повышение надежности контроля. Для этого сигналы с индукционного датчика 1 интегрируются в интеграторе 6 и затем запоминаются в блоке 8 памяти. Сигнал с выхода блока 8 подается на один вход блока 11 деления, на другой вход которого поступает сигнал с задатчика 12 грузонесу- щего органа. После масштабирования получается сигнал, пропорциональный текущей скорости ленты, подаваемый на первый вход компаратора 21. С пуском конвейера сигнал от датчика 35 активной мощности поступает на блок 25 суммирования, где
Фиг. I
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1987 |
|
SU1479394A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
