Известны устройства для испытания червячных редукторов, червяч11ые колёса которых сидят на жёстко соединённых между собой валах, а оси червяков соединены между собою цилиндрической зубчатой передачей, получающей вращение от приводного двигателя, причём один из червячных валов находится под постоянной осевой нагрузкой. Настоящим изобретением предлагается в этих известных устройствах червячный вал, к которому приложена нагрузка, выполнить разрезным.
Такое выполнение вала имеет целью обеспечить относительное осевое перемещение частей вала без нарушения их вращения.
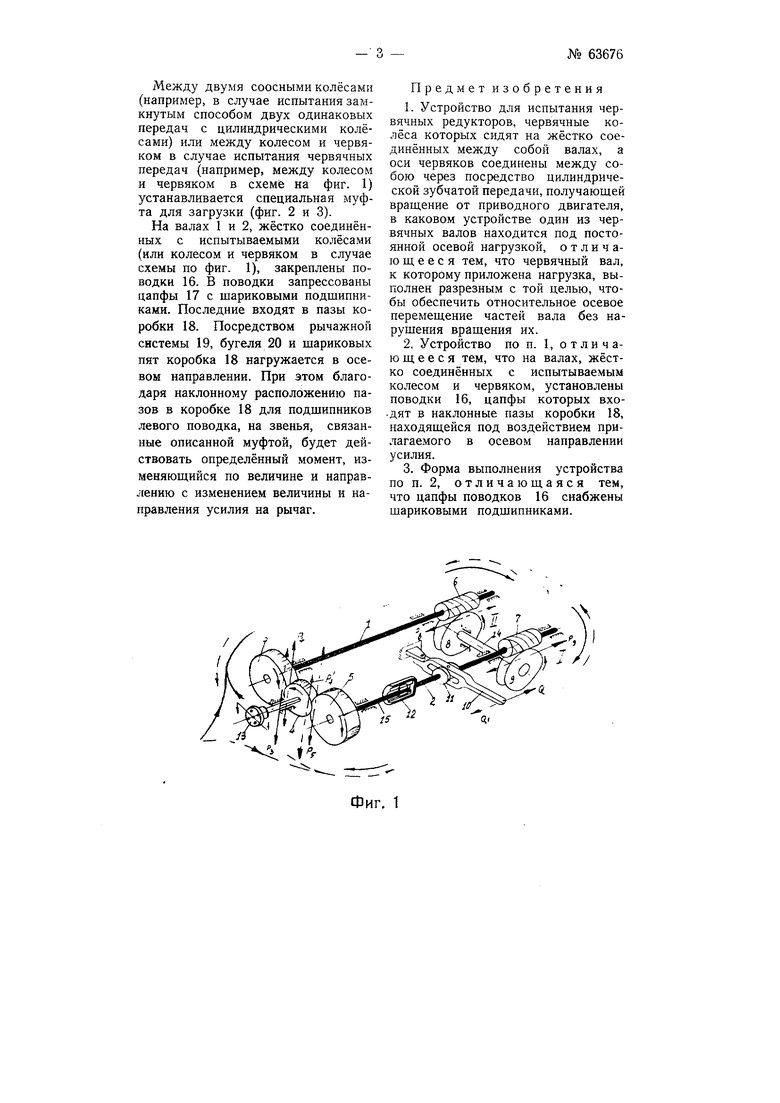
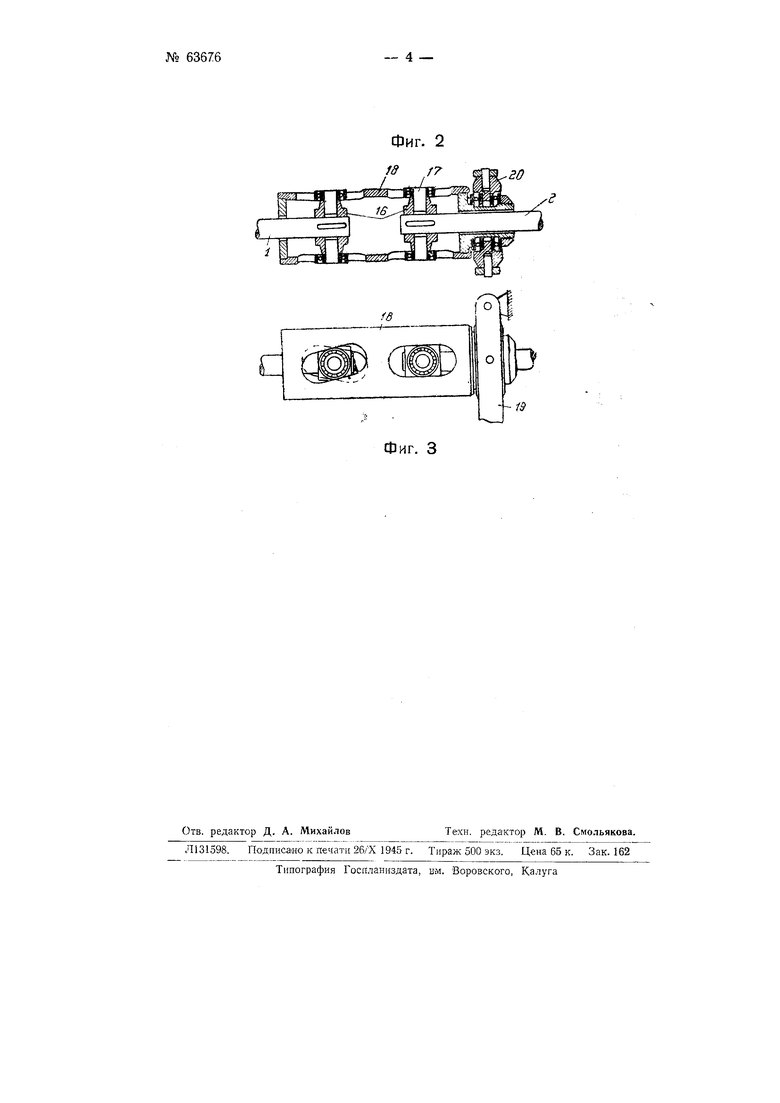
На чертеже фиг. 1 изображает схему предлагаемого устройства, а фиг. 2 и 3 - муфту для осуществления нагрззок в продольном разрезе и в виде сверху.
Испытываются одновременно два одинаковых редуктора I и II. Валы колёс 8 и 9 жёстко соединяются между собой (фиг. 1). Валы 1 и 2 червяков 6 и 7 связаны передачей с цилиндрическими колесами 3, 4, 5. Колесо 4 соединяется фланцем 13 с валом двигателя и приводит в движение всю систему.
Коробка 11 с шариковой пятой червяка 7 редуктора I вынесена из корпуса.
Прикладывая усилие Q(Qi) к рычагу 10, нагружают червяк 7 в осевом направлении через посредство коробки И с пятой. Зубцы колеса 9 воспринимают осевое усилие, сообщаемое червяку, н препятствуют его перемещениям. Таким образом окружное усилие колеса 9 равно усилию, приложенному к пяте коробки 11.
Во избежание разгрузки от сил трения в качестве радиальных опор червяка 7 применяются роликовые подшипники, не препятствующие осевым перемещениям. Вал червяка 7, к которому приложена нагрузка, выполнен разрезным и состоит из частей 2 и 15, соединённых муфтой 12, допускающей осевые перемещения части 2.
Усилия, приложенные к зубцам колеса 9 со стороны зубцов сцепляющегося с ним червяка 7, показаны векторами, смещёнными к центру. Червяки правые.
При действии на рычаг 10 силы QI усилия, приложенные к зубцам колёс, показаны сплошными линиями. Окружное усилие, приложенное к зубцам колеса 9 со стороны чёрвяка 7, направлено против его окружной скорости и, следовательно, колесо 9 - ведущее, а червяк 7--ведомый. Из равновесия вала 14 с колёсами 8 и 9 следует, что усилия PS и Рэ противоположно иапраблены. Направление усилия PS совпадает с направлением окружной скорости и, следовательно, колесо 8 - ведомое, а червяк 6 - ведущий.
Колесо 3, очевидно, ведомое, поэтому направление усилия Ps совнадает с направлением окружной скорости.
Таким образом силовой поток направлен от колеса 4 к колесу 3, от червяка 6 к колесу 8, от колеса 9 к червяку 7 и дальше от колеса 5 к колесу 4. Направление силового потока при действии силы Qi и данном направлении вращения, показано сплошными стрелками.
Если изменить направление вращения, сохранив прежним направление усилия QI, то, очевидно, направления усилий на зубцы не изменяются, а поэтому ведущие колёса (червяки) сделаются ведомыми, а ведомые - ведущими, т. е. направление силового потока изменится на обратное и редуктор I будет работать нормально, передавая силоэрй поток от червяка к колесу, а редуктор II будет передавать силовой, поток от колеса к червяку.
При действии на рычаг 10 силы Q и указанном направлении вращения, направления усилий и силовых потоков показаны пунктиром. В этом случае у редуктора I червяк ведущий, у редуктора II червяк ведомый.
При изменении направления вращения ведущим является червяк у редуктора П и ведомым - у редуктора. 1.
Таким образом при изменении направлений вращения и нагрузки на рычаг 10, каждый из редукторов можно заставить работать как при ведущем, так и при ведомом червяке, причём в каждом из этих двух случаев участвуют (поочерёдно) обе рабочие поверхности зубцов.
Условия работы зацепления редуктора при ведущем червяке мало
отличаются от условий работы при ведомом червяке. Основной величиной, характеризующей эти условия, является сила прижатия ниток червяка к зубцам колеса; на эту силу влияют потери в зацеплении.
Описанным способом можно испытывать и самотормозящиеся червячные передачи. Пусть редукторы I и П - самотормозящиеся, червяк 6 - ведущий, а , червяк 7 - ведомый.
В этом случае силовой поток от червяка 7 не будет возвращаться к колесу 5, что имело место при несамотормозящихся редукторах, и колесо 5 будет получать мощность от колеса 4 и передавать её червяку 7.
При нагрузке рычажной системы силой Q (и, следовательно, загруженных червячных редукторах) после приложения момента от мотора к колесу 4 в цепи 4-5-15-12-2 могут оказаться зазоры (за счёт бокового зазора между зубцами, мёртвых ходов в муфте 12, в шпоночных соединениях и т. д.).
В этом случае на червяк 7 не действует момент со стороны вала и, следовательно, вследствие самоторможения, вращение системы невозможно при применении обычных редукторов. Однако в данном случае червяк 7 имеет возможность перемещаться в осевом направлении и, поэтому, зазоры в системе 4-5- -15-12--2 будут выбраны за время поворота колеса 4, в течение которого червяк 7 переместится в осевом направлении.
В этом случае работа червячной пары подобна работе реечной передачи.
При ведущем червяке 7 зазоры в цепи 4-3-6 выберутся вращением колеса 4 за счёт осевого перемещения червяка 7 при неподвижном колесе 9.
Движение червяка 7 в этом случае аналогично движению винта при неподвижной гайке.
Можно воспроизвести переменные по величине и направлению нагрузки при испытании редукторов ещё следующим образом.
Между двумя соосными колёсами (например, в случае испытания замкнутым способом двух одинаковых передач с цилиндрическими колёсами) или между колесом и червяком Б случае испытания червячных передач (например, между колесом и червяком в схеме на фиг. 1) устанавливается специальная муфта для загрузки (фиг. 2 и 3).
На валах 1 и 2, жёстко соединённых с испытываемыми колёсами (или колесом и червяком в случае схемы по фиг. 1), закреплены поводки 16. В поводки запрессованы цапфы 17 с шариковыми подшипниками. Последние входят в пазы коробки 18. Посредством рычажной системы 19, бугеля 20 и шариковых пят коробка 18 нагружается в осевом направлении. При этом благодаря наклонному расположению пазов в коробке 18 для подшипников левого поводка, на звенья, связанные описанной муфтой, будет действовать определённый момент, изменяющийся по величине и направлению с изменением величины и направления усилия на рычаг.
Предмет изобретения
1.Устройство для испытания червячных редукторов, червячные колёса которых сидят на жёстко соединённых между собой валах, а оси червяков соединены между собою через посредство цилиндрической зубчатой передачи, получающей вращение от приводного двигателя, в каковом устройстве один из червячных валов находится под постоянной осевой нагрузкой, отличающееся тем, что червячный вал, к которому приложена нагрузка, выполнен разрезным с той целью, чтобы обеспечить относительное осевое перемещение частей вала без нарушения вращения их.
2.Устройство по п. 1, отличающееся тем, что на валах, жёстко соединённых с испытываемым колесом и червяком, установлены поводки 16, цапфы которых входят в наклонные пазы коробки 18, находящейся под воздействием прилагаемого в осевом направлении усилия.
3.Форма выполнения устройства по п. 2, отличающаяся тем, что цапфы поводков 16 снабжены шариковыми подшипниками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для испытания подшипников на износ | 1938 |
|
SU56078A1 |
| Переменная передача | 1937 |
|
SU53548A1 |
| Винт с автоматически изменяемым шпатом | 1943 |
|
SU64239A1 |
| Устройство для испытания червячных передач | 1947 |
|
SU100391A1 |
| Бесступенчатый привод транспортного средства | 2020 |
|
RU2737407C1 |
| Реверсивная передача от двигателя к ведущей оси для автомотрис, обслуживающих вспомогательный железнодорожный транспорт | 1927 |
|
SU16694A1 |
| Бесступенчатая коробка передач с повышенным диапазоном передаточных отношений | 2019 |
|
RU2716396C1 |
| ХВОСТОВОЙ РЕДУКТОР ТРАНСМИССИИ ВЕРТОЛЕТА | 2012 |
|
RU2505459C1 |
| Вариатор | 2021 |
|
RU2756392C1 |
| ЭЛЕКТРОПРИВОД АРМАТУРЫ ТРУБОПРОВОДОВ | 2005 |
|
RU2276751C1 |
ш 1Нп
ш UMU
Фиг. 3
