Недостатком известных электрических молотков является сравнительная их сложность. Работа таких молотков неизбежно сопровождается быстрым износом деталей. Поэтому при создании новых конструкций молотков надо итти по линии возможного упрощения механизмов с тем, чтобы легко и быстро сменить изношенную деталь.
При создании таких конструкций были попытки применить гибкую связь между движущимся частями молотка, но попытки эти не увенчались успехом, так как конструктивные их решения были неудачны.
Настоящее изобретение даёт новое конструктивное оформление молотков с гибкой связью между кривошипом привода и бойком. Решение это состоит в том, что нагружённый пружиной боек соединён с пальцем кривошипа при помощи троса.
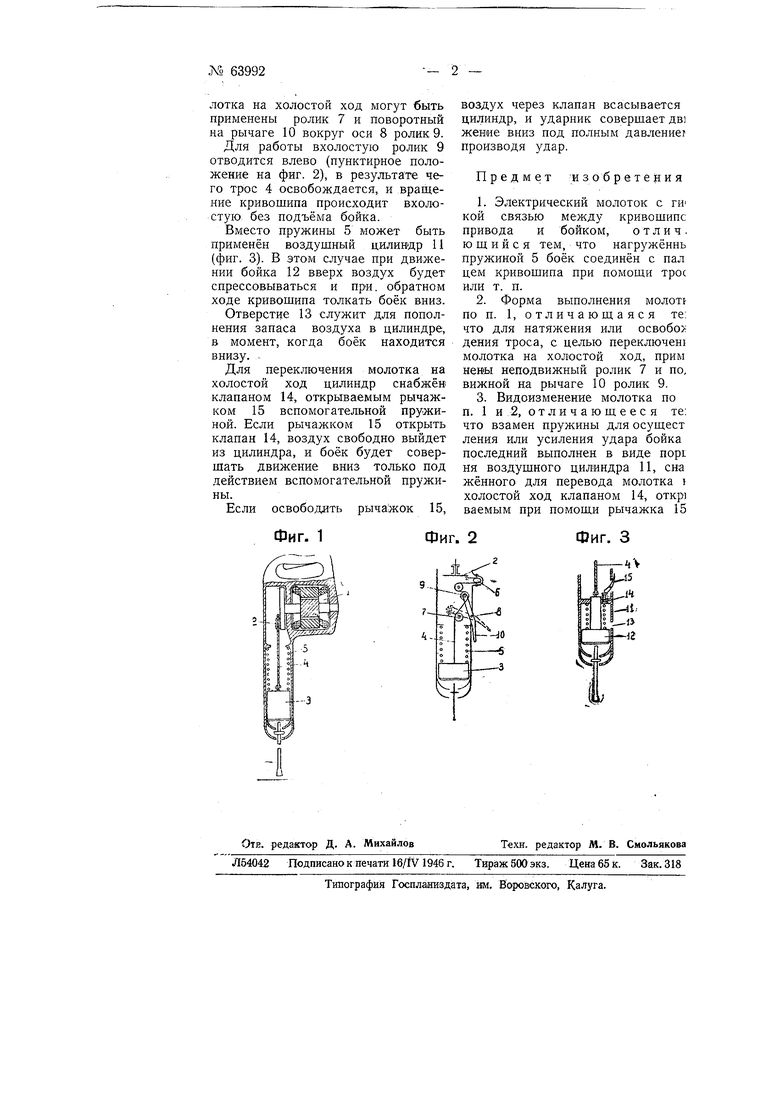
На чертеже фиг. 1 схематически изображает предлагаемый молоток, фиг. 2 даёт схему натяжного устройства молотка, а фиг. 3 - видоизменение молотка.
Молоток получает движение от двигателя 1, который сообщает
вращательное движение кривошипу 2, расположенному непосредственно на валу или соединенном через передачу. Двигатель и кривошип, в зависимости от конструктивного оформления, могут быть расположены горизонтально или вертикально.
Бойку 3 сообщается возвратно поступательное движение благодаря гибкой связи в виде троса 4 н т. п. между бойком 3 и пальцем кривошипа 2 и пружине 5, расположенной между упорами в корпусе молотка и бойком 3.
Наличие гибкой связи в виде троса 4, огибающего ролик 6, позволяет избежать применения специальных устройств для разъединения бойка с кривощипом в момент удара, в то же время надёжно обеспечивая как натяжение пружины 5 при подъёме бойка, так и отсутствие отдачи при ударе.
Это, кроме того, даёт возможность так оформлять конструкцию, что каждая износившаяся деталь может быть легко и быстро заменена запасной.
Для натяжения или освобождения троса 4 при переключении мо