Изобретение относится к области приборостроения, в частности к устройствам для определения метрологических характеристик рабочих вакуумметров абсолютного давления в области высокого и сверхвысокого вакуума. Известны устройства для динамической градуировки вакуумметров, содержащие образцовый или эталонный ртутный компрессионный манометр и три камеры, последовательно соединенные через диафрагмы известной проводимости, камеру с относительно высоким давлением, градунровочную камеру, к которой присоединен градуируемый вакуумметр, и камеру низкого давления, связанную с вакуумным насосом. Недостатком этих устройств является применение больших количеств токсичной ртути, требующее принятия специальных мер безопасности. Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому устройству является устройство для динамической градуировки вакуумметров абсолютного давления, содержащее образцовый мембранно-емкостный манометр и три камеры, последовательно соединенные через диафрагмы известной проводимости, камеру с относительно высоким давлением, градуировочную камеру, к когорой присоединен градуируемый вакуумметр, и камеру низкого давления, связанную с вакуумным насосом. Недостаток этого устройства состоит в низкой точности градуировки, обусловленной наличием неучитываемой систематической погрешности измерения исходного давления. Эта погрешность возникает из-за того, что измеряемое образцовым манометром давление отличается от давления газа непосредственно перед диафрагмой вследствие непрерывного течения газа в камере и связанной с этим неоднородностью плотности молекул по объему камеры. Для расчета же требуется знать давление именно перед диафрагмой. Цель изобретения - повышение точности и упрощение градуировки. Поставленная цель достигается тем, что в устройстве, содержащем образцовый мембранно-емкостиый манометр и три камеры, последовательно соединенные через диафрагмы известной проводимости, камеру с относительно высоким давлением, градуировочную камеру, к которой присоединен градуируемый вакуумметр, и камеру низкого давления, связанную с вакуумным насосом, образцовый мембранно-емкостный манометр установлен между камерой высокого давления и градуировочной камерой устройства, а диафрагма между этими камерами выполнеиа в мембраие образцового манометра.
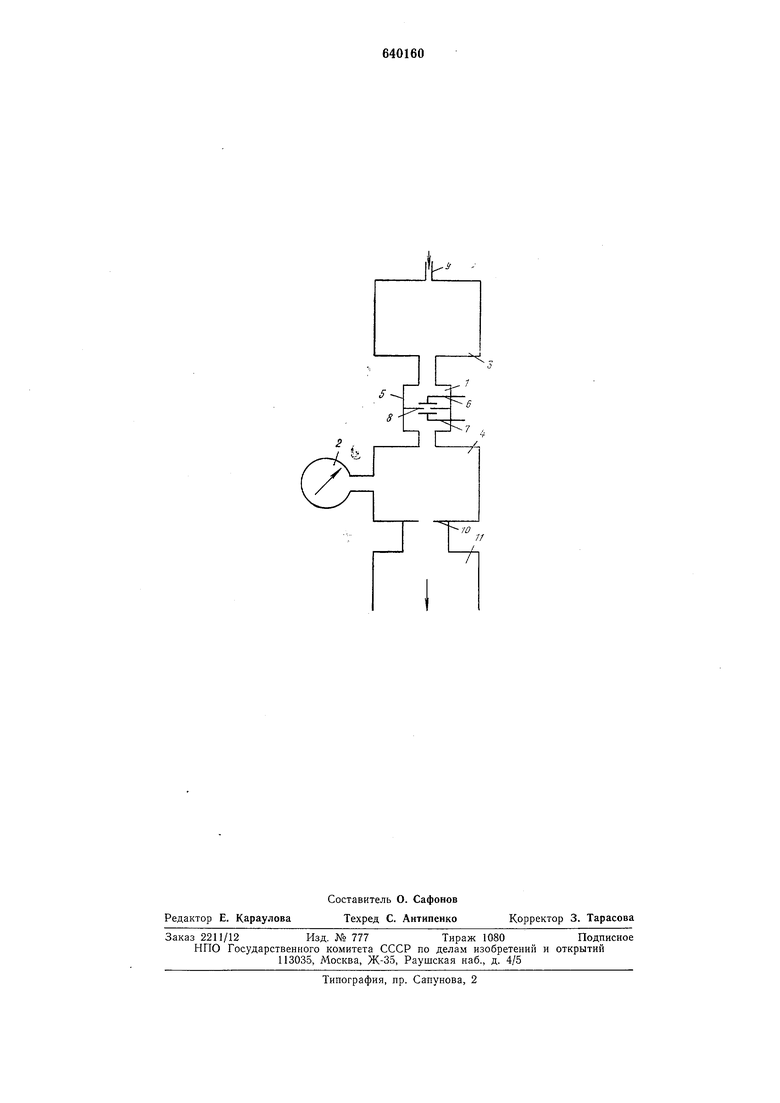
На чертеже изображена вакуумная система предлагаемого устройства для динамической градуировки вакуумметров абсолютного давления.
Вакуумная система предлагаемого устройства включает образцовый компенсационный мембранно-емкостный манометр 1 и градуируемый вакуумметр (или манометрический преобразователь) 2. Образцовый манометр установлен между камерой 3 высокого давления и градуировочной камерой 4, т. е. измерительная камера манометра сообщается с камерой 3, а другая камера - опорного давления - присоединяется к градуировочной камере 4. Чувствительный элемент образцового манометра 1 выполнен в виде тонкой упругой мембраны 5, снабженной двумя дисковыми электродами 6 и 7. В мембране 5 выполнена диафрагма 8 проводимости Ui (в молекулярном режиме течения). Необходимый перепад между давлениями PI в камере 3 и Р2 в камере 4 обеспечивается непрерывным течением газа, поступающего через натекатель 9 в камеру 3 и откачиваемого из камеры 4 через диафрагму 10 проводимости if/2 (также в молекулярном течении). Диафрагма 10 проводимости Uz отделяет камеру 4 от камеры 11 низкого давления, примыкающей к высоковакуумному (сверхвысоковакуумному) насосу (агрегату).
Градуировка вакуумметра на предлагаемом устройстве осуществляется следующим образом.
После предварительной откачки системы с помощью натекателя 9 устанавливают некоторое давление PI газа в камере высокого давления 3. Одновременно измеряют давление Pi по образцовому манометру 1 и отсчитывают показание градуируемого вакуумметра 2. Давление Р в градуировочной камере 4 рассчитывается (при ) по формуле
Л --/ if/2
Сопоставляют расчетное значение давления PZ с соответствующим показанием градуируемого вакуумметра.
При малых размерах диафрагмы 8 (обычно диаметр менее 100 мкм) она не
влияет как на упругие свойства мембраны, так и на метрологические характеристики манометра в целом. В то же время необходимое условие для правильных измерений по манометру - пренебрежимая малость опорного давления по сравнению с измеряемым давлением в предлагаемом устройстве выполняется автоматически (при
).
Наиболее существенно, что определение давления Р свободно от погрещностей, связанных с динамической неоднородностью давления в различных точках камеры высокого давления. В предлагаемом устройстве измерению подвергается именно давление непосредственно перед диафрагмой проводимостью f/i. Это позволяет устранить указанную систематическую погрещность, достигающую 10%, и довести погрещность измерений давления PI до уровня 1 %. Соответственно повыщается и точность градуировки вакуумметров.
Наряду с этим отпадает необходимость в специальной системе для откачки камеры
опорного давления образцового манометра, которая обычно включает ряд высоковакуумных и низковакуумных насосов, трубопроводов и коммутирующих элементов, а также контрольно-измерительную аппаратуру. В предлагаемом устройстве эти функции выполняют градуировочная камера и остальные элементы собственной откачной системы устройства. Тем самым достигается значительное упрощение конструкции
устройства и технологии градуировки.
Формула изобретения
Устройство для динамической градуировки вакуумметров абсолютного давления,
содержащее образцовый мембранно-емкостный манометр и три камеры, последовательно соединенные через диафрагмы известной проводимости, камеру с высоким давлением, градуировочную камеру, к которой
присоединен градуируемый вакуумметр, и камеру низкого давления, связанную с вакуумным насосом, отличающееся тем, что, с целью повыщения точности и упрощения градуировки, образцовый мембранно-емкостный манометр установлен между камерой высокого давления и градуировочной камерой устройства, а диафрагма между этими камерами выполнена в мембране образцового манометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамической градуировки вакуумметров | 1982 |
|
SU1275243A1 |
| Способ динамической градуировкиВАКууММЕТРОВ АбСОлюТНОгО дАВлЕНия | 1976 |
|
SU823916A2 |
| СПОСОБ ДИНАМИЧЕСКОЙ ГРАДУИРОВКИ ВАКУУММЕТРОВ | 1997 |
|
RU2190200C2 |
| Способ градуировки вакуумметров | 1978 |
|
SU957024A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ ГРАДУИРОВКИ МАНОМЕТРОВ НИЗКОГО ДАВЛЕНИЯ | 1972 |
|
SU436253A1 |
| Способ градуировки вакуумметров | 1978 |
|
SU808889A1 |
| Способ динамической градуировки манометров низкого давления | 1976 |
|
SU564553A1 |
| Способ градуировки вакуумметров | 1985 |
|
SU1290115A1 |
| Способ динамической гградуировки измерителей парциальных давлений | 1973 |
|
SU462097A1 |
| Устройство для динамической градуировки манометров низкого давления | 1973 |
|
SU469071A1 |