I
Изобретение относится к средствам аналоговой вычислительной техники и предназначено для применения при моделировании систем, содержащих механические передачи.
Известно, что момент, передаваемый от одной сосредоточенной массы к другой является функцией деформации упругих элементов, разделяющих эти массы, и может быть представлен в виде Мj К., где i - номер звена механической передачи; Mj - момент, передаваемый соответствующим звеном; (- - величина упругой деформации элементов соответствующего звена; К, коэффициент упругости, зависящий от материала, из которого изготовлены элементы передачи, их размеров и формы. Деформация в безлюфтовой передаче определяется очевидным соотнесением cf slf. - ( , где т.Ч соответственио, входная и выходная координаты соответствующего звена механической передачи, причем выходная координата предыдущего звена является входной
косфдинатсй для последующего. Уравнения каждого на звеньев передачи запишутся следующим. образом
,- d fati-o. M-K.c., dt dt
i dP
где - передаточное число соответствукь щего звена передачи;
3 - момент инерции зиементов соот ветствуюяюго звена передачи;
момент сопротивления на выхооном валу соответствующего звена передачи от сил сухсаг-о трения.
Известно аналш овое устройство дпа моделирования механических передач с люфтами и упругостямй, а также с уадтом коэффициента полезного действия обратнн мых и необратимых цепей моделируемых передач, содержащее интеграторы, усилители, 46тырехдйодные мосты, резисторы и источиики постояннш о двухпапярного напряжения. При этом многозвенная механ ческая передача представляется системой масс, разделенных упругими элементами и люфтами l.
Наиболее близким по технической суи ности к изобретению является устройство i содержащее входной интегратор и цепочки по числу звеньев механической передачи, каждая из которых состоит из последовательно соединенных первого интегратора, усилителя и второго интегратора, входной и вторые интеграторы через соответствук щие мостовые выпрямители соединены с источниками постоянного напряжения, вььход усилителя первой цепочки соединен со входом входного интегратора, выход усилителя каждой последующей цепочки соеДИ1ШН со входом второго интегратора предыдущей цепочки sj.
К недостатку указанного устройства следует отнести недостаточную точность моделирования.
Целью изобретения является повьииение точности моделирования.
Поставленная цель достигается тем, что в устройство введены по числу звеньев механической передачи дополнительные цепочки из последовательно-соединенных функцноивльного преобразователя и блока неливейностей, выход каждого блока нелинейностей подключен ко входу усилителя соответствуюией цепочки, а вход каждого функционального преобразователя соединен с выходом второго интегратора соответствующей цепочки и входом первого интегратора последующей цепочки.
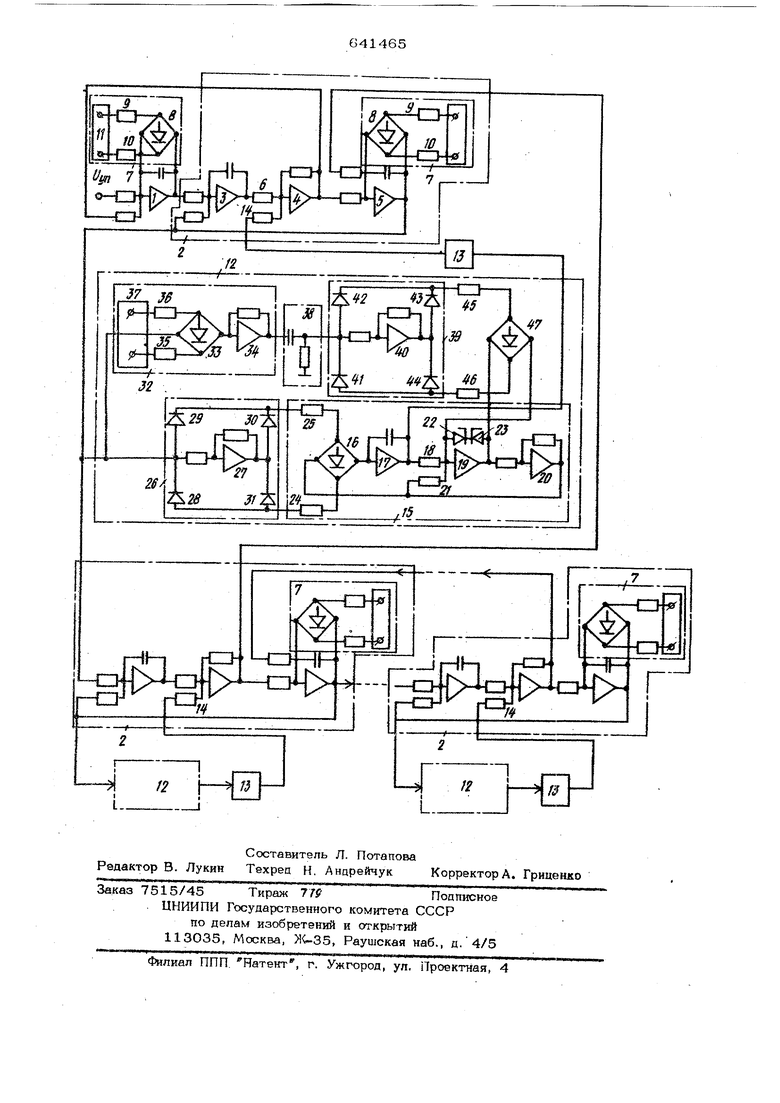
На чертеже представлена схема устройства для моделирования многозвенной механической передачи.
Устройство содержит входной интегр тор 1, к выходу которого последовательно по числу звеньев механической передачи И подключтны h цепочек 2. Каждая из цепочек содержит первый интегратор 3, усилитель 4 и второй интегратор 5. Вход интегратора 3 является входом соответствующей цепочки, а выход через по следовательно соединенные резистор 6 и усилитель 4 соединен со входом интегратора 5, выход которого соединен со вторым входом интегратора 3 и является выходом соответствующей цепочки 2, причем выход усилителя 4 первой цепочки .нен с входом интегратора 1.
Кроме того, входу и выходу интеграто ра 1 и ко входу и выходу интегратора 5 каждой цепочки подключены соотв8тствук шие блоки 7, каждый из которых соде{ жит .мостовой выпрямитель 8, подключе ный к соответствующему интегратору, а точки встречного и обратного соединения диодов мостового выпрямителя 8 подключены через резисторы 9 и 10 к источнику постоянного двухпопярного напрях ения 11. Выход интегратора 5 каждой цепочки соединен с соответствующим функциональным преобразователям 12, выход которого через соответствующие последовательно соединенные блок нелинейностей 13 и резистор 14 подключен ко второму входу усилителя 4 соответствующей цепочки. Функциональный преобразователь 12 представляет устройство для формирования сигнала, пропорционального величине угла поворота выходного вала соответст вующего звена передачи с правильным чередованием его квадрантов при смене знака скорости изменения этого угла. Он содержит генератор периодических колебаний 15, состоящий из последовательно соединенных в замкнутую кольцевую схему диодного моста 16, интегратора 17, резистора 18, усилителя 19 и инвертора 2О; причем выход инвертора 2О соединен через резистор 21 со вторым входом усилителя 19, вход и выход которого соединены через встречно-включенные стабилит роны 22 и 23. Кроме того, к точкам встречного и обратного соединений диодов моста 16 через резисторы 24 и 25 подключен двухполупериодный выпрямитель 26, выполненный на инверторе 27 и диодах 28, 29, 30, 31. Вход инвертфа 27, являющийся входом функционального преобразователя 12, соединен с выходом интегратора 5 и со входом блока формирования знака входного напряжения 32,содержаще го последовательно соединенные диодный мост 33 и усилитель 34,причем точки встречного и обратного соединений диодов моста 33 подключены через резисторы 35 и 36 к источнику П1х:тоянногр двухпопярного напряжения 37 Выход усилителя 34, являющийся выходом блока формирования знака входного напряжения 32, соединен через дифференцирующую цепочку 38 со входом двухполупериодного выпрямителя 39, выполненного на инвертсьре 40 и диодах 41, 42, 43, 44, а встречного и обратного соединений д одов 42, 43 и 41, 44 соединены через резисторы 45 и 46, соответственно, с точками обратного и встречного соединений диодов моста 47, включенного с вы-, хода усилителя 19 на его вход. Выход интегратора 17, являющийся выходом
функционального преобразователя 12, соединен,со входом блока нелинейностей 13, Устройство работает следутошим образом. Напряжение Пvr} пропорциональное движу щему моменту на валу двигателя, поступает на вход интегратора 1. С выхода интегратора 1 напряжение, пропорциональное скорости движения входного вала первого звена механической передачи, поступает на вход интегратора 3, на другой вход которого поступает напряжение с вььхода интегратора 5, пропорциональное скорости движения выходного вала первого звена моделируемой передачи. На выходе интегратора 3 формируется напряже ние, пропорциональное деформации упругих элементов первого звена передачи, которое через резистор 6 поступает на вход усилителя 4, с выхода которого напряжение, пропорциональное моменту, передаваемому первым упругим звеном поступает на вход интегратора 5, .который в сочетании с блоком 7 моделирует действие момента сопротивления от сил сухого трения на выходном валу первого звена моделируемой технической передачи. Кроме TCSTO, напряжение с выхода ин тегратора 5 поступает на вход последующей цепочки, которая работает аналогичным образом, и на вход функционального преобразователя 12. При изменении знака скорости движения вала двигателя (входного вала механической передачи) изменяется знак напряжения на выходе интегратора 5 и, следовательно, на входе функционального преобразователя 12. При этом на выходе блока формирования знака входного напряжения 32 произой дет скачок напряжения и с выхода диодисто моста 47 на вход усилителя 19 пройдет импульс той же полярности, что и напряжение на выходе этого .усилит&ля, в результате efo напряжение на выходе усилителя 19 сменит знак, а напрэжение на выходе интегратора 17, являющегося выходом функционального преобра зователя 12, будет изменяться в противоположном направлении, и чередование Квадрантов угла поворота выходного вала соответствующего звена моделируемой механической передачи будет правильным С выхода интегратора 17 сигнал поступа ет на вход блока нелинейностей 13, реализующего нелинейную зависимость кинемагической погрешности звена механичео- 55 т.
кой передачи в функции угла поворота выходного вала соответствующего звена. С выхода блока нелинейностей через резистор 14 сигнал подается на второй вход усилителя 4, и, таким образом, вводится в модель соответствующего звена механической передачи.
Таким образом, учитываются кинем тические погрешности элементов зацепления при моделировании многозвенной передачи, и в результате функциональные возможности устройства для моделирования многозвенной механической передачи раоширяются, а точность моделирования повышается. Формула изобретения Устройство для моделирования много- авенной механической передачи, содержащее входной интегратор и цепочки по чиолу звегсьев механической передачи, каждая из которых состоит из последовательно соедииенных первого интегратора, ус лителя и второго интегратора, входной и вторые интеграторы через соответству щие мостовые выпрямители соединены с источниками постоянного напряжения, усилителя первой цепочки соединен со входом входного интегратора, выход ус1шителя каждой последующей цепочки соединен со входом второго интегратора предыдущей цепочки, отличаюше&с я тем, что, с целью повыщенин точности моделирования, в него введены по числу звеньев механической передачи дополнительные цепочки из последовательно соединенных функционального преобразователя и блока нелинейностей, выход каждого бнока нелинейностей подключен ко входу усилителя соответствующей цепочки, а вход каждого функционального преобразователя соединен с выходом второго интегратора соответствующей цепочки и входом первого интегратора последующей цепочки, Йсточники информации, принятые во вниманий при экспертизе: 1,Автс юкое свидетельство СССР М 341051, кл. GO6Q 7/54, 1972. 2.Литовченко Ц. Г. Аналитическое и структурное описание механической передачи. Автоматика и телемеханика , 1961, ХХП, М 3, с. 1106.