1
Изобретение относится к приборостроению и может быть использовано, например, в качестве датчика углового положения ротора бесконтактного двигателя постоянного хока.
Синусоидальные сигналы с числом периодов 4-12 за оборот, которые необходимы в таких случаях, получают, как правило,при помощи бесконтактных поворотныхтрансфо 1аторов,
известен датчик углового положения типа бесконтактного поворотного трансформатора, содержащий сосредоточенные обмотки, ротор, полюса которого разделены в аксиальном направлении на ряд отдельных участков, смещенных по окружности на углы, соответствующие порядку исключаемых гармонических составлякнцих 1} . При этом на выходе получается напряжение, являющееся суммой напряжений, вызванных изменением проводимостей всех участков ротора. Сдвиг напряжений на угол, соответствующий какой-либо гармонике, позволяет ее скомпенсировать, но только пропорционально ширине участка. Таким образом компенсация получается частичной и поэтому при ,трапецеидальной форме индуцированного напряжения результирующая форма
сигнала будет иметь значительные отклонения от синусоиды.
Известен также бесконтактный датчик углового положения, содержащий зубчатые ротор и статор, обмотку возбуждения и две сигнальные синусные обмотки, оси которых сдвинуты ва 90 эл.град., размещенные на статв ре 12) .
Данное техническое решение является наиболее близким к известному по технической сущности и достигаелюму результату, но зависимость выходного напряжения датчика от угла положения недостаточна близка к синусоидальной
Цель изобретения - повышение точности воспроизведения синусной зависимости выходного напряжения от угла положения.
Для этого ротор в аксиальном наНравлении разделен немагнитным промежутком на две равные части, смещенные на угол , а зубцы ротора неравномерно расположены по его окружности и выполнены с двумя последовательно чередукядимися шагами, равными
SL
«а
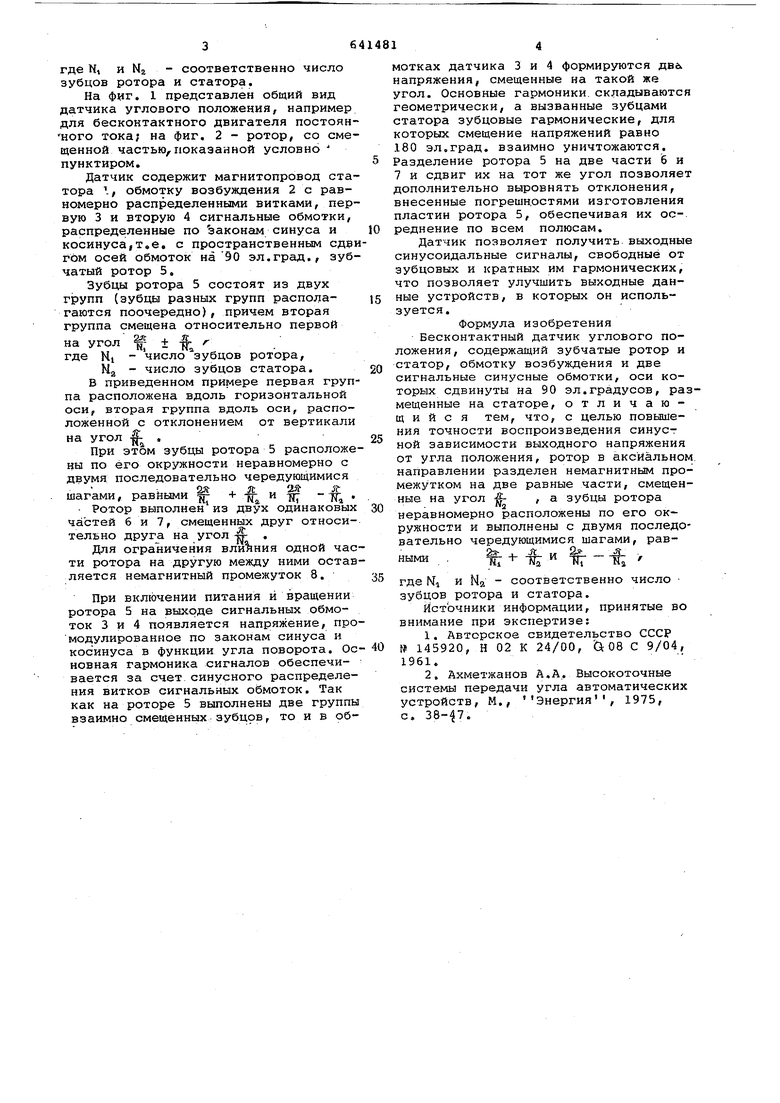
N, где N и NZ - соответственно число зубцов ротора и статора. На Фиг. 1 представлен общий вид датчика углового положения, например для бесконтактного двигателя постоянного тока; на фиг. 2 - ротор, со смещенной частью, показанной условно пунктиром. Датчик содержит магнитопровод статора f обмотку возбуждения 2 с равномерно распределенными витками, первую 3 и вторую 4 сигнальные обмотки, распределенные по законам синуса и косинусаIт.е. с пространственным сдви гом осей обмоток на90 эл.град., зубчатый ротор 5. Зубцы ротора 5 состоят из двух групп {зубца разных групп располагаются поочередно), причем вторая группа смещена относительно первой на угол f ± f, где MI - число зубцов ротора, Mg - число зубцов статора. В приведенном примере первая груп па расположена вдоль горизонтальной оси, вторая группа вдоль оси, расположенной с отклонением от вертикали на угол . При этом зубцы ротора 5 расположе ны по его окружности неравномерно с двумя последовательно чередующимися yt П 25 f шагами, равйыми N и -f| Ж Ротор выполнен из двух одинаков ых частей 6 и 7, смещенных друг относительно друга на угол -ст- . Для ограничения влияния одной час ти ротора на другую между ними остав ляется немагнитный промежуток 8. При включении питания и вращении ротора 5 на выходе сигнальных обмоток 3 и 4 появляется напряжение, про модулированиое по законам синуса и косинуса в функции угла поворота. Ос новная гармоника сигналов обеспечивается за счет синусного распределения витков сигнальных обмоток. Так как на роторе 5 выполнены две группы взаимно смещенных зубцовf то и в обмотках датчика 3 и 4 формируются двь напряжения, смещенные на такой же угол. Основные гармоники, складываются геометрически, а вызванные зубцами статора зубцовые гармонические, для которых смещение напряжений равно 180 эл.град. взаимно уничтожаются. Разделение ротора 5 на две части 6 и 7 и сдвиг их на тот же угол позволяет дополнительно выровнять отклонения, внесенные погрешностями изготовления пластин ротора 5, обеспечивая их осреднение по всем полюсам. Датчик позволяет получить выходные синусоидальные сигналы, свободные от зубцовых и кратных им гармонических, что позволяет улучшить выходные данные устройств, в которых он используется. Формула изобретения Бесконтактный датчик углового положения, содержащий зубчатые ротор и статор, обмотку возбуждения и две сигнальные синусные обмотки, оси которых сдвинуты на 90 эл.градусов, размещенные на статоре, отличающийся тем, что, с целью повышения точности воспроизведения синуст ной зависимости выходного напряжения от угла положения, ротор в аксиальном направлении разделен немагнитным промежутком на две равные части, смещенные на угол , а зубцы ротора неравномерно расположены по его окружности и выполнены с двумя последовательно чередующимися шагами, равными ,. -bf Жгде NI и Na - соответственно число зубцов ротора и статора. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 145920, Н 02 К 24/00, G 08 С 9/04, 1961. 2.Ахметжанов А.А. Высокоточные системы передачи угла автоматических устройств, М., Энергия, 1975, с. 38-J7.
ЖЖ
Риг. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Многополюсный двоичный двухфазный бесконтактный датчик | 1985 |
|
SU1377973A1 |
| Многополюсный вращающийся трансформатор | 1984 |
|
SU1262650A1 |
| Вентильный электродвигатель | 1988 |
|
SU1527689A1 |
| Индукционный редуктосин | 1990 |
|
SU1798865A1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| Индукционный электромашинный многополюсный двухфазный фазовращатель | 1978 |
|
SU743127A1 |
| Трехфазный асинхронный редукторный электродвигатель | 1983 |
|
SU1594655A1 |
| Датчик скорости и положения | 1982 |
|
SU1024844A1 |
| СТАТОР РЕВЕРСИВНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 1994 |
|
RU2121206C1 |
| Многополюсный вращающийся трансформатор | 1982 |
|
SU1065978A1 |
tiue.2
