но друга со смещением на угол, кратный полюсному делению, а ось каждой полуфазы измерительной обмотки датчика совпадает с осью катушечной группы соответствующей фазы якорной обмотки. Для лучшего использования объема спинки статора отверстия для полуфаз измерительной обмотки датчика расположены на оси зубцов статора, а катушки обмотки смещения расположены между полуфазами измерительной обмотки. Каждая полуфаза измерительной обмотки может состоять из одной катушки, выполненной с шагом, равным одному зубцовому делению статора, а для к,атушек смещения с наружной стороны статора могут быть выполнены пазы. Обмотка смещения под- ключается к источнику постоянного тока. 2 з.п. ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С ВСТРОЕННЫМИ ДАТЧИКАМИ СКОРОСТИ И УГЛОВОГО ПОЛОЖЕНИЯ РОТОРА | 2001 |
|
RU2188494C1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| Электромеханический преобразователь вентильного электродвигателя | 1989 |
|
SU1700704A1 |
| Вентильный электродвигатель с встроенными датчиками углового положения ротора | 2018 |
|
RU2681302C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 2012 |
|
RU2497264C1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1994 |
|
RU2066912C1 |
| СИНХРОННЫЙ АГРЕГАТ | 1991 |
|
RU2076437C1 |
| СИНХРОННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОМАГНИТНОЙ РЕДУКЦИЕЙ | 1995 |
|
RU2076433C1 |
| Многополюсный синхронный электродвигатель | 2021 |
|
RU2779505C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
Изобретение относится к электротехнике, в частности к бесконтактным вентильным электродвигателям с встроенными датчиками углового положения. Целью изобретения является упрощение конструкции вентильного электродвигателя и повышение крутизны выходного сигнала его датчика углового положения. Вентильный электродвигатель содержит ротор 2 с 2 P полюсами, статор 1 с M- фазной якорной обмоткой, измерительную обмотку 10 датчика углового положения, каждая фаза которой состоит из двух последовательно соединенных между собой полуфаз 4 и 5 и составляет с источником переменного напряжения высокой частоты со средней точкой полумостовую схему. Двигатель снабжен тороидальной обмоткой смещения, состоящей из последовательно и согласно соединенных между собой катушек 10, намотанных на спинке статора через его пазы, а полуфазы измерительной обмотки намотаны через отверстия, выполненные в спинке статора, причем полуфазы каждой фазы расположены друг относительно друга со смещением на угол, кратный полюсному делению, а ось каждой полуфазы измерительной обмотки датчика совпадает с осью катушечной группы соответствующей фазы якорной обмотки. Для лучшего использования объема спинки статора отверстия для полуфаз измерительной обмотки датчика расположены на оси зубцов статора, а катушки обмотки смещения расположены между полуфазами измерительной обмотки. Каждая полуфаза измерительной обмотки может состоять из одной катушки, выполненной с шагом, равным одному зубцовому делению статора, а для катушек смещения с наружней стороны статора могут быть выполнены пазы. Обмотка смещения подключается к источнику постоянного тока. 2 з.п. ф-лы, 2 ил.
Изобретение относится к злектро- технике, в частности к бесконтактным вентильным электродвигателям.
Цель изобретения - упрощение конструкции электродвигателя и повышение крутизны выходного сигнала его датчика углового положения.
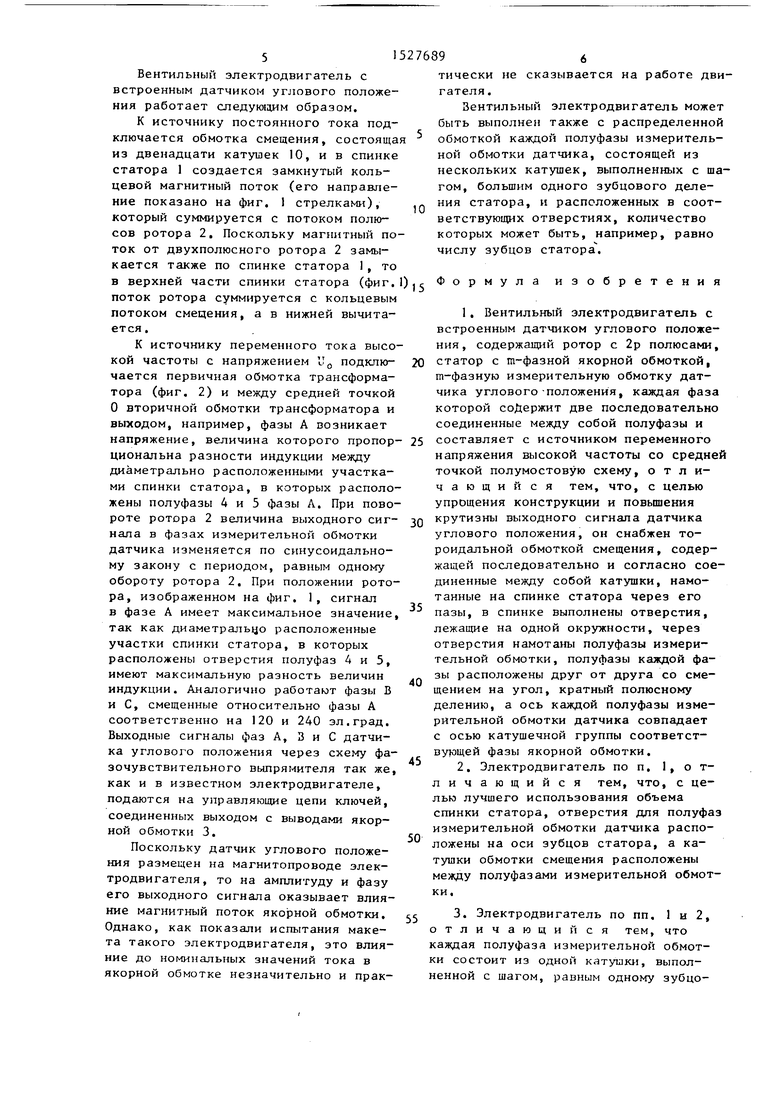
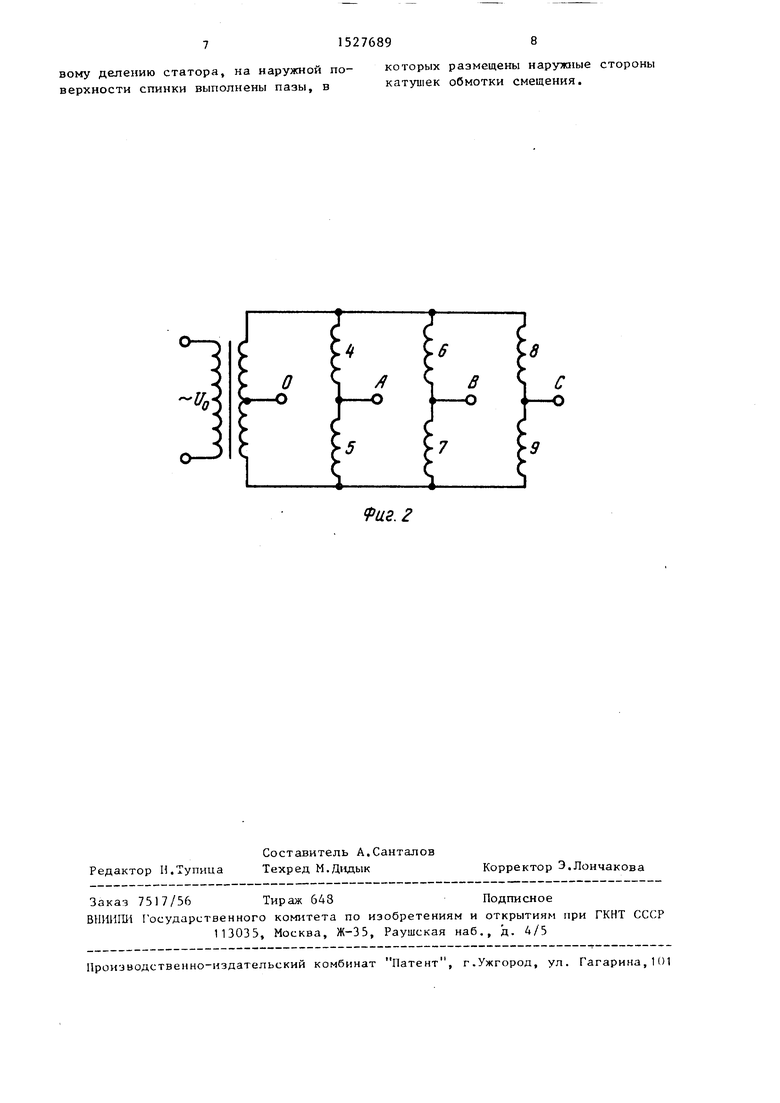
На фиг. 1 представлен вентильный электродвигатель с встроенным датчиком углового положения, общий вид; на фиг. 2 - схема соединения измерительных обмоток датчика положения.
Вентильньгй электродвигатель с
встроенным датчиком углового положения содержит статор 1 с двадцатью ie- тырьмя пазами, ротор 2 с 2р полюсами трехфазную якорную обмотку 3, размещенную в пазах статора 1, трехфазную измерительную обмотку датчика углового положения, каждая фаза которой, например фаза А, состоит из намотанных через отверстия в спинке статора 1 и последовательно соединенных межд собой полуфаз 4 и 5, ось симметрии которых совпадает с осью симметрии катушечных групп фазы А якорной обмотки 3. Аналогично полуфазы 6 и 7 фазы В расположены симметрично отно- сительно середины катушечных групп фазы В якорной обмотки 3, а полуфазы 8 и 9 соответственно симметрично относительно фазы С якорной обмотки, тороидальную обмотку смещения датчика углового положения, состоящую из последовательно и согласно соединенных мехсду собой катушек 10, намотанных на спинке статора через его пазы Каждая фаза измерительной обмотки датчика положения (фиг. 1) состоит из диаметрально расположенных полуфаз, однако, при выполнении электродвигателя многополюсным эти полуфазы
0
5
0
35
. ..
50
могут быть смещены друг от друга на угол, кратный полюсному делению.
Катушки 10 обмотки смещения на фиг. 1 размещены в каждом втором пазу статора, однако, это не является обязательным. Например, для более равномерного заполнения пазов статора число катушек может быть принято равным числу пазов и напротив, если нет высоких требований к равномерности заполнения пазов, то между полуфазами измерительных обмоток датчика достаточно размещать по одной ка- тущке 10, тем более, что она занимает сравнительно малую часть объема паза.
Полуфазы измерительной обмотки датчика положения, как показано на фиг. 1, выполнены с шагом, равным зубцовому делению статора, а отверстия Для этих полуфаз расположеяы на оси зубцов только для лучшего использования объема спинки статора, поэтому если нет высоких требований к коэффициенту использования стато-- ра, то шаг обмотки для полуфаз может быть принят и не равным зубцовому делению статора.
Измерительные обмотки датчика углового положения соединены по трехфазной полумостовой схеме, где V - напряжение источника переменного тока высокой частоты, которое через трансформатор со средней точкой О на вторичной обмотке подается на по- луфазы 4-9 обмотки датчика. Каждая из трех фаз измерительной обмотки состоит из последовательно соедннен- ных между собой полуфаз н подключена к вторичной обмотке трансформатора. Выходными сигналами дпя фаз датчика являются напряжения между точками А, В, Си средней точкой О на вторичной обмотке трансформатора.
Вентильный электродвигатель с встроенным датчиком углового положения работает следующим образом.
К источнику постоянного тока подключается обмотка смещения, состояща из двенадцати катушек 10, и в спинке статора 1 создается замкнутый кольцевой магнитный поток (его направление показано на фиг. 1 стрелками) который суммируется с потоком полюсов ротора 2. Поскольку магнитный поток от двухполюсного ротора 2 замыкается также по спинке статора 1, то в верхней части спинки статора (фиг. поток ротора суммируется с кольцевым потоком смещения, а в нижней вычитается,
К источнику переменного тока высокой частоты с напряжением Ug подключается первичная обмотка трансформатора (фиг. 2) и между средней точкой О вторичной обмотки трансформатора и выходом, например, фазы А возникает напряжение, величина которого пропорциональна разности индукции между диаметрально расположенными участками спинки статора, в которых расположены полуфазы 4 и 5 фазы А. При повороте ротора 2 величина выходного сигнала в фазах измерительной обмотки датчика изменяется по синусоидальному закону с периодом, равным одному обороту ротора 2. При положении ротора, изображенном на фиг. 1, сигнал в фазе А имеет максимальное значение так как диаметральцо расположенные участки спинки статора, в которых расположены отверстия полуфаз 4 и 5, имеют максимальную разность величин индукции. Аналогично работают фазы В и С, смещенные относительно фазы А соответственно на 120 и 240 эл.град. Выходные сигналы фаз А, 3 и С датчика углового положения через схему фа- зочувствительного выпрямителя так же как и в известном электродвигателе, подаются на управляющие цепи ключей, соединенных выходом с выводами якорной обмотки 3.
Поскольку датчик углового положения размещен на магнитопроводе электродвигателя, то на амплитуду и фазу его выходного сигнала оказывает влияние магнитный поток якорной обмотки. Однако, как показали испытания макета такого электродвигателя, это влияние до номинальных значений тока в якорной обмотке незначительно и прак
96
тически не сказывается на работе двигателя .
Вентильный электродвигатель может быть выполнен также с распределенной обмоткой каждой полуфазы измерительной обмотки датчика, состоящей из нескольких катушек, выполненных с шагом, большим одного зубцового деления статора, и расположенных в соответствующих отверстиях, количество которых может быть, например, равно числу зубцов статора.
0
5
г
0
5
0
5
0
5
Формула изобретения
с осью катушечной группы соответствующей фазы якорной обмотки.
« 6 8 О /f 3 С
fas. 2
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Вентильный электродвигатель | 1980 |
|
SU955398A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
