Изобретение относится к области машиностроения и может быть использовано во всех отраслях аародного хозяйства дая преобразования вращательного движе- аия в возвратно-поступательное 5ши наоборот, например, для поршневой машины.
Известен механизм дая преобразования вращательного движения в1 возврат н« поступательное, содержащий параллельно установленные в корпусе вал и поводок, устройство для изменения эксцент рйситета .
Недостатком этого механизма являе ся сложность выполнения его устройст ва для изменения эксцентриситета.
Наиболее близким к изобретению по технической сущности является механизм для преобразова 1ия вращательного движе- нив в еозвратно поступательное, с одержаш1 й параллельно установленные в кор- пусе вал в поводки, устройство дпя изм невия .эксцентриситета, , кинематически связывающее между собой вал и поводки, и шатуны, шарнирно установленные на поводках 2,
Недостатком известного механизма является относительная сложность его конструкции, вследствие использования в устройстве для изменения эксцентрис тета высшей кинематической парь -резь бовЕЯГо соединения.
Цель изобретения « упрощение конструкции механизм.
Указанная цель достигается тем, что устройство для изменения эксцентриситета выполнено в виде шарнирных ант№параллелсграммов, последовательно уста5новленных в плоскости, перпендикулярной оси вращения вала, и последовательно жестко связанных каждый одной своей большей стороной в средней точке с одной из коренныхщеек вала, а другой
0 большей стороной с одним из повод ков.
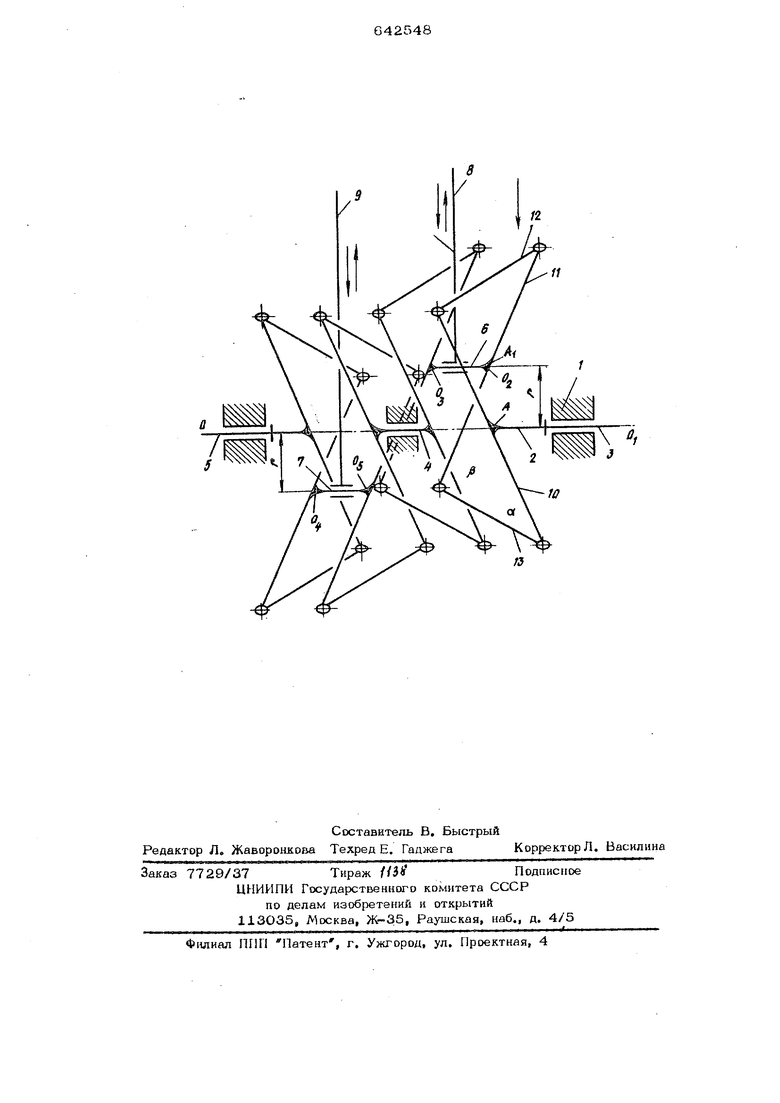
На чертеже изображена кинематичеокая схема механизма.
/Механизм дпа преобразования враша тельиси о движения в воовратно-поступ тельное содержит параллельно установленные в корпусе 1 вал 2, имеющий KJ {ренные шейки 3, 4 и 5, и поводки 6 и 7, а также шатуны 8 и 9, шарнирно установленные на поводках 6 и 7,
Устройство для изменения эксиентр ситета, кинематически связывающее
между собой вал 2 и поводки 6 и 7, вьшопнено в виде ш нирных антипараллелограммов, последовательно установпенных в плоскости, перпендикулярной оси вращения вала 2, и имеющих большие 10 и 11 и малые 12 и 13 стороны. Каждый антипараллерограмм последовательно и жестко связан одной своей большей стороной 10 в средней точке А с одной из коренных шеек, например шейкой 3, вала 2., а другой большей стороной 11 в средней точке Ai с одним из поводков, например поводком 6
Эксцентриситет осей О -О- и
О, поводков 6 и 7 относительно
04О оси и - О вала 2 при равенстве углов oL и ft , образованных одной из малых сторон, например стороной 12 или 13, шарнирного антипараллелограмма и большими его сторонами 10 и 11, О-Рсутствует вследствие совпадения проекг ций точек А и А на плоскость, пер. , При не
пендикулярную оси О Оравенстве ухлов -i и }4 проекции точек
А и AJ не совпадают, поэтому имеет место эксцентриситет Р .
Механизм работает следующим образом. При вращении вапа 2 вращается антипараллелограмм, шарниры которого зафиксированы в положении необходимого эксцентриситета поводков 6 и 7, которые также, вращаясь вокруг оси О 0 , передают возвратно-поступательное движение шатунам 8 и 9.
Формула изобретения Механизм для преобразования вращательного движения в возвратно-поступательное, содержащий параллельно установленные в корпусе вал и поводки, устройство для изменения экЬцентриситета, кинематически связывающее межд собой вал и поводки, и шатуны, шарни| но установленные на поводках, отличающийся тем, что, с целью упрощения конструкции механизма, усгройство для изменения эксцентриситета «зыполнено в виде шарнирных антипараллелограммов, последовательно уставовлен|1ых в плоскости, перпендикулярной оси вращения вала, и последовательно жестко связанных каждый одной своей бсшьшей стороной в средней точке с ной из коренных шеек вала, а другой большей стороной - с одним из поводков. Источники, информации, принятые во внимание при экспертизе.
1.Авторское свидетельство СССР № 23О44, кл. F 16 Н 21/2О, 1931.
2,Артоболевский И. И. Механизмы
в современной технике. Т. 2. М., Наука, 1971, с. 457, механизм № 150О.
/J
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСШАТУННЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 2007 |
|
RU2345259C1 |
| БЕСШАТУННЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2009 |
|
RU2420680C1 |
| ШЕСТЕРЕННЫЙ БЕСШАТУННЫЙ МЕХАНИЗМ С МНОГОКОЛЕНЧАТЫМ ВАЛОМ | 2013 |
|
RU2537073C1 |
| Кривошипно-шатунный механизм с регулируемой длиной кривошипа | 1990 |
|
SU1803653A1 |
| Способ изготовления ротора электростатического гироскопа и устройство для осуществления этого способа | 2016 |
|
RU2638870C1 |
| Кривошипно-шатунный механизм с регулируемой длиной кривошипа | 1989 |
|
SU1703895A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ | 1998 |
|
RU2139462C1 |
| Механизм для преобразования вращательного движения в винтовое или вращательное | 1986 |
|
SU1373924A1 |
| Двигатель внутреннего сгорания | 2017 |
|
RU2733157C1 |
| ВИБРОДВИЖИТЕЛЬ С ПРЕОБРАЗОВАНИЕМ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2008 |
|
RU2387567C1 |