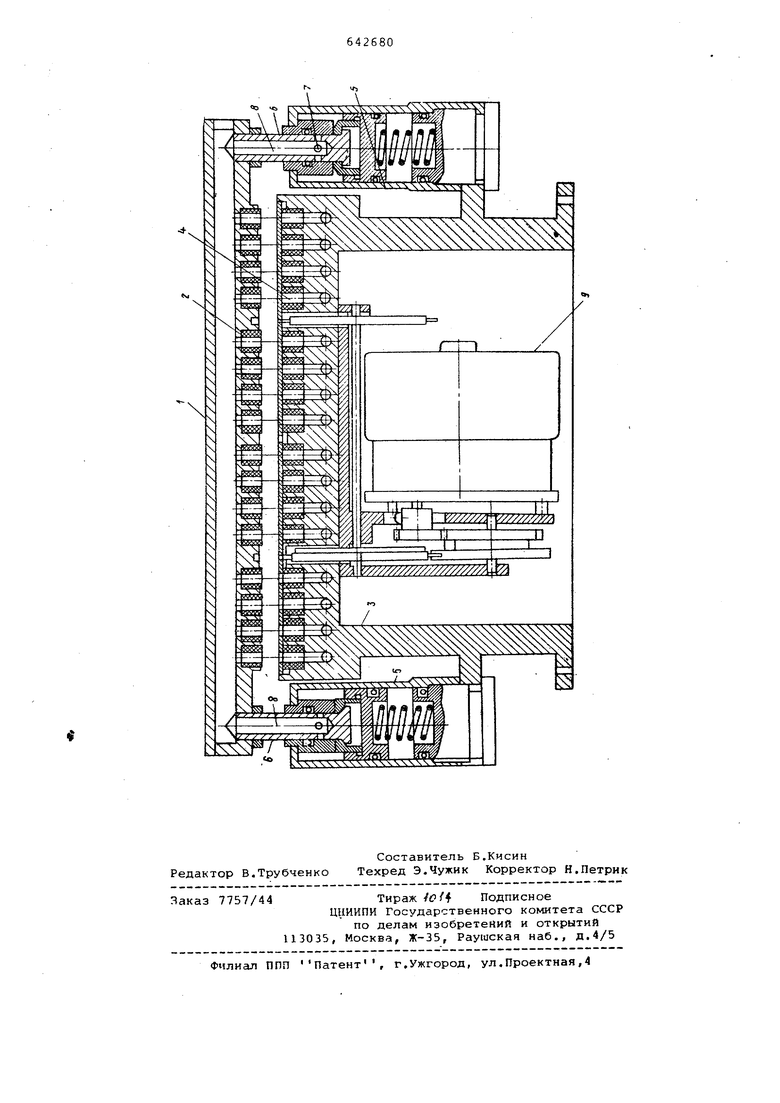
тью пневмогребенки 1 осуществляется с помощью золотниковых отверстий 7 Я отверстий 8, выполненных в штоках 6. Перемещение программоносителя (не показан) производится с помощью привода 9.
Перед началом работы командоаппарата между пневмогребенкой 1 и распределителем 3 сжатого воздуха располагается программоноситель, например перфокарта из.влагостойкогс материала. Затем в полости пневмоцилиндров 5 подводится сжатый воздух. Пустотелые штоки 6, преодолевая усилие пружин, начинают опускаться вниз, увлекая за собой пневмогребенку 1,. которая прижимается к распределителю 3 сжатого воздуха. После соприкосновения пневмогребенки 1 с поверхностью распределителя 3 (нижние положения штоков 6), золотниковые отверстия 7 соединяются с внутреними полостями гильз пневмоцилиндров 5, и сжатый воздух через отверстия 8 в штоках 6 поступает во внутрёнюю полость пневмогребёнки, После считывания кадра програкилы заданной перфокартойсжатый воздух отключается, штоки пневмоцилиндров под действем прижима возвращаются в исходное положение, происходит перемещение перфокарты на шаг с помощью привода, к пневмоцилиндрам подводится воздух, и процесс считывания программы повторяется.
Благодаря тому, .что подвод сжатого воздуха к пневмогребенке осуществляется только после того, как она
прижата к поверхности распределителя сжатого воздуха исключаются ложные срабатывания командоаппарата, из-за исключения, утечек воздуха между пневмогребенкой и распределителем сжатого воздуха, .и перетечек воздуха 5 из отверстий 2 пневмогребенки в соседние отверстия 4 распределителя сжатого воздуха.
Формула изобретения
Пневматический командоаппарат, содержащий привод, распределитель сжатого воздуха, пгевмогребенку с
15 механизмом прижима, о т л и ч а ющ и и с я тем, что, с целью повышения точности работы за счет исключрния утечек воздуха между распределителем сжатого воздуха и пневмогребенкой,
20 механизм прижима выполнен в виде двух пневмоцилиндров одностороннего действия с полыми штоками, связан. ными с пневмогребенкой, причем в поршнях пневмоцилиндров выполнены
золотниковые отверстия, гильзы обоих пневмоцилиндров механически; соединены с распределителем сжатого воздуха и пневматически через золотниковые отверстия поршней пневмоцилиндров и полости штоков с пневмогребенкой.
Источники информации, принятые во внимание при экспертизе:
1. Кобринский А.Е. Числа управляют станками , Наука, М., 1967, с.14-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРУЙНЫЙ КОМАНДОАППАРАТ | 1972 |
|
SU346709A1 |
| Пневматический командоаппарат | 1981 |
|
SU957173A1 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
| ПНЕВМОПРИВОД МЕХАНИЗМА ШВЕЙНОЙ МАШИНЫ | 2000 |
|
RU2190711C2 |
| КЛЕПАЛЬНЫЙ ПРЕСС | 1994 |
|
RU2074047C1 |
| Пневматическая система управления | 1988 |
|
SU1532900A1 |
| ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ | 1996 |
|
RU2098673C1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Формовочная машина для изготовления литейных форм | 1983 |
|
SU1082547A1 |
| ЗОЛОТНИКОВЫЙ ПНЕВМО-ГИДРАВЛИЧЕСКИЙ РАСПРЕДЕЛИТЕЛЬ С ГИДРАВЛИЧЕСКИМ УПРАВЛЕНИЕМ | 2021 |
|
RU2759883C1 |